İçindekiler
- IMU nedir?
- Atalet Ölçüm Biriminin Bileşenleri
- Atalet Ölçüm Birimi Nasıl Çalışır?
- Otonom ve Kendi Kendine Sürüş Yapan Araçlar
- Havacılık ve Uzay
- Robotik
- Sanal Gerçeklik (VR) ve Artırılmış Gerçeklik (AR)
- Tıbbi Cihazlar
- Spor Analitiği ve Hareket Yakalama
- Tüketici Elektroniği
- MEMS IMU ve FOG IMU Arasındaki Temel Farklar
- MEMS IMU: Genel Bakış ve Özellikler
- FOG IMU: Genel Bakış ve Özellikler
- IMU Performans Göstergeleri
- IMU Kalibrasyon Yöntemleri
- Atalet Ölçüm Birimlerinin Avantajları
- Atalet Ölçüm Birimlerinin Sınırlamaları
- IMU ve AHRS (Yön ve Konum Referans Sistemi) Karşılaştırması
- IMU ve INS (Ataletli Navigasyon Sistemi) Karşılaştırması
- Farklı IMU Türleri ve Piyasa Genel Bakışı
- Atalet Ölçüm Biriminin Gelecek Trendleri ve Gelişimi
Giriş
Atalet Ölçüm Birimleri (IMU'lar), otonom araçlar, robotik ve havacılık da dahil olmak üzere günümüzün yüksek teknoloji endüstrilerinde çok önemlidir. Bununla birlikte, yaygın kullanımlarına rağmen, birçok kişi hala IMU'ların nasıl çalıştığını ve potansiyellerini tam olarak anlamakta zorlanmaktadır. Bu anlayış olmadan, sistem performansında verimsizlik ve hata riski vardır. Bu makalede, IMU'ların temellerini, uygulamalarını ve gelecekteki trendlerini inceleyerek bu teknolojiden en iyi şekilde yararlanmanızı sağlayacağız.
Atalet Ölçüm Birimi (IMU), bir nesnenin yönünü ve konumunu belirlemek için ivmeyi, açısal hızı ve bazen de manyetik alanları ölçen bir cihazdır. IMU'lar navigasyon, kontrol sistemleri ve hareket takibi için çok önemlidir. Sensör verilerini birleştirerek, IMU'lar GPS sinyallerinin zayıf veya mevcut olmadığı ortamlarda hareket ve yönün hassas bir şekilde izlenmesini sağlar.
IMU'ların geleceği heyecan verici; sensör füzyonu ve yapay zeka entegrasyonu yeni olanaklar sunuyor. Gelin, bu sistemlerin nasıl çalıştığına ve en ileri teknolojilerdeki rolleri açısından gelecekte neler olacağına yakından bakalım.
Atalet Ölçüm Biriminin (IMU) Temelleri
Atalet Ölçüm Biriminin Bileşenleri
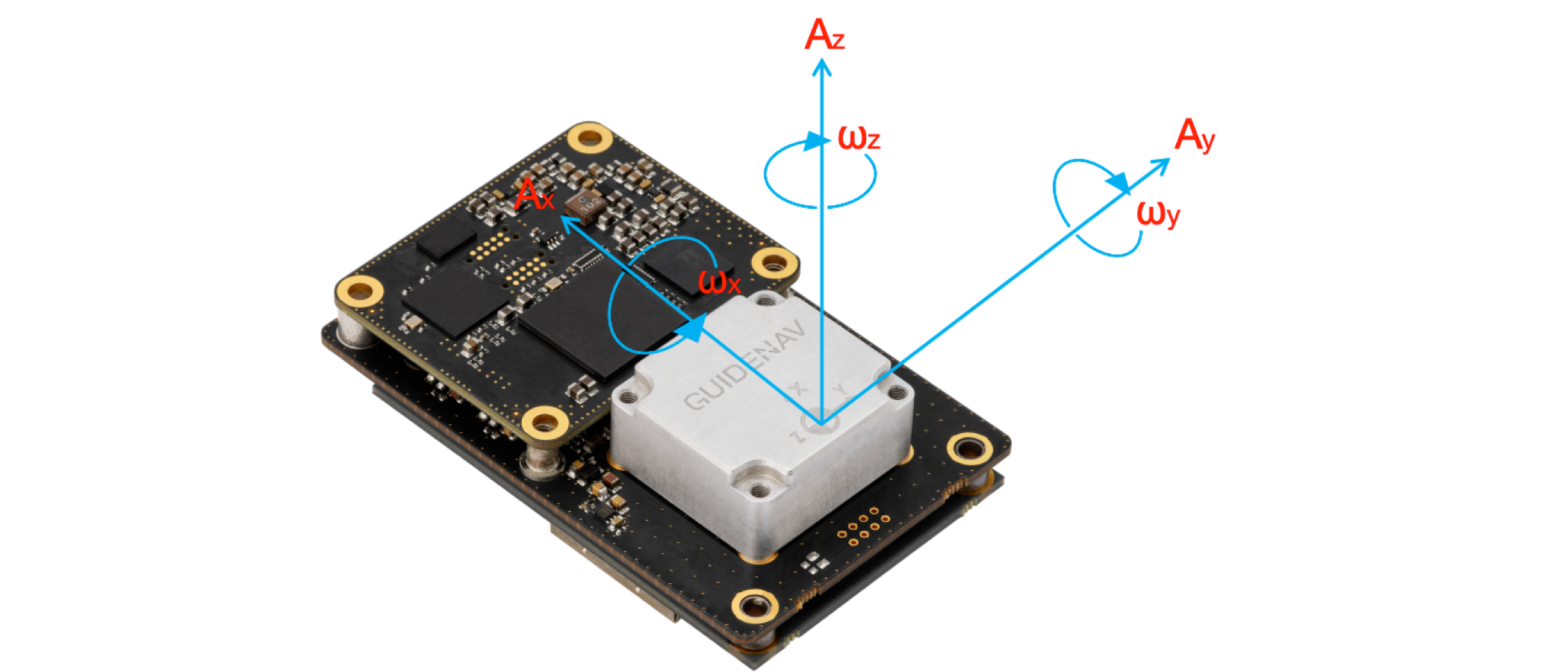
Bir IMU (Atalet Ölçüm Birimi) tipik olarak aşağıdaki temel sensörleri içerir. Bunları ayrıntılı olarak inceleyelim ve her birinin genel işlevselliğe nasıl katkıda bulunduğuna bakalım:
| Bileşen | İşlev | Çıktı |
|---|---|---|
| İvmeölçer | X, Y ve Z eksenleri boyunca doğrusal ivmeyi ölçer. | Hız ve yer değiştirme verilerini sağlar. |
| Jiroskop | X, Y ve Z eksenleri etrafındaki açısal hızı (dönme hızını) ölçer. | Yönelim (tutum) hakkında veri sağlar. |
| Manyetometre (İsteğe bağlı) | Dünya'nın manyetik alanına göre manyetik alan şiddetini ve yönünü ölçer. | Yönü (pusula yönünü) gösterir. |
Bu sensörlerin her biri, gerçek zamanlı hareket verileri sağlamada ve nesnenin uzayda nasıl hareket ettiğini ve döndüğünü anlamamıza yardımcı olmada çok önemli bir rol oynar.
Atalet Ölçüm Birimi Nasıl Çalışır?
GuideNav , IMU'ların sorunsuz çalışması için tasarımını şu şekilde yapıyoruz
- İvme Ölçümü : İvmeölçer, üç eksen boyunca hızdaki değişiklikleri algılar. Bu veriler, nesnenin ne kadar hızlı ivmelendiğini veya yavaşladığını belirlememizi sağlar; bu da zaman içindeki yer değiştirmeyi izlemek için kritik öneme sahiptir.
- Açısal Hız Ölçümü : Jiroskop, cismin üç eksen etrafında ne kadar döndüğünü izler. Bu dönme verilerini zaman içinde entegre ederek, IMU bize cismin uzaydaki kesin yönelimini söyleyebilir.
- Manyetik Alan Ölçümü (İsteğe Bağlı) : Dahil edilirse, manyetometre Dünya'nın manyetik alanını ölçerek pusula yönü sağlar. Bu, jiroskop okumalarındaki sapmaları düzeltmeye yardımcı olur ve IMU'nun uzun süreler boyunca doğru kalmasını sağlar.
GuideNav'da gelen sensör füzyon algoritmaları kullanıyoruz . Bu sayede, nesnenin 3 boyutlu uzaydaki konumunun ve yönünün son derece doğru bir temsilini oluşturuyoruz.
Atalet Ölçüm Birimlerinin (IMU) Uygulamaları
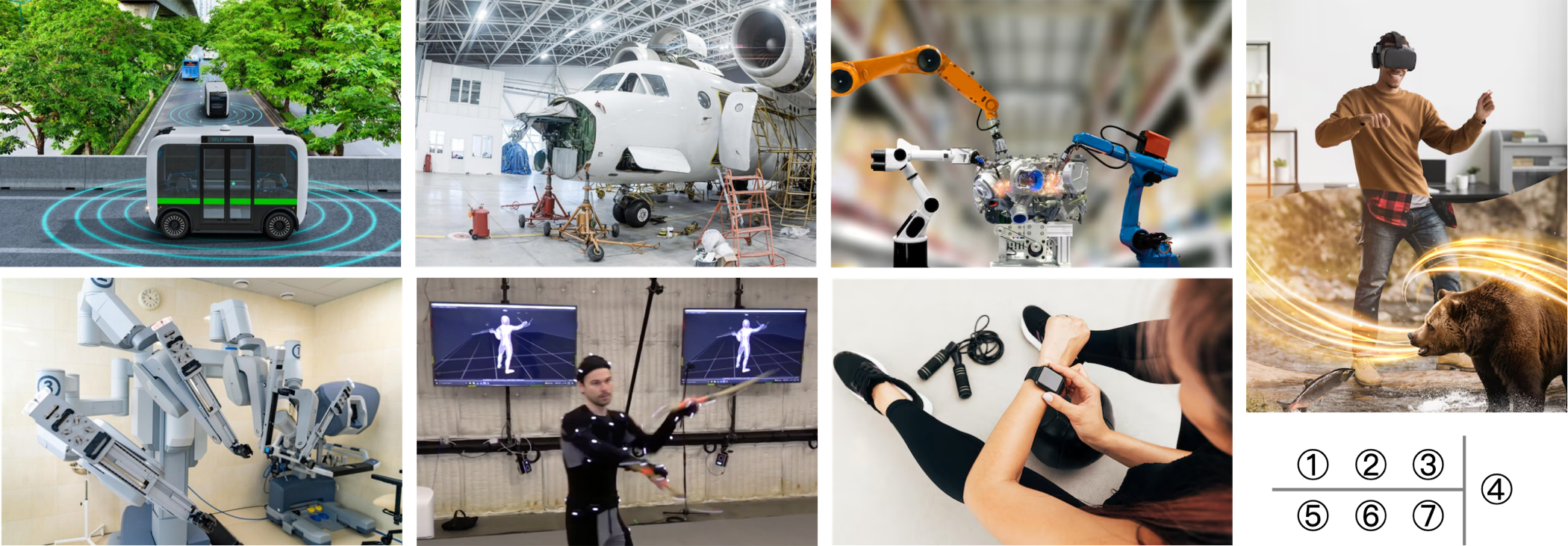
Atalet Ölçüm Birimleri (IMU'lar), ivme, açısal hız ve bazen manyetik alanlar hakkında temel veriler sağlayarak çok çeşitli uygulamalarda kullanılır. Hassasiyetleri ve çok yönlülükleri, onları otonom araçlar, havacılık, robotik, sanal gerçeklik, sağlık hizmetleri, spor analitiği ve tüketici elektroniği gibi sektörlerde hayati öneme sahip kılmaktadır. Aşağıda, IMU'ların vazgeçilmez olduğu bazı önemli uygulamaları inceleyeceğiz.
1. Otonom ve Kendi Kendine Sürüş Yapan Araçlar
otonom araçların geliştirilmesi ve işletilmesinde kritik öneme sahiptir . Aracın hareketini ve yönünü gerçek zamanlı olarak izlemeye yardımcı olarak, istikrarı ve hassas navigasyonu sağlarlar. Küresel Konumlandırma Sistemi (GPS) verileri kullanılırken, GPS sinyallerinin zayıf veya mevcut olmadığı durumlarda (örneğin tünellerde, kentsel kanyonlarda veya uzak bölgelerde) IMU'lar
| Başvuru | IMU'nun Rolü |
|---|---|
| Otonom Araçlar | Araç yönelimini ve hareketini gösteren veriler sağlayarak istikrarlı navigasyonu mümkün kılar. |
| Drone'lar | Uçuş rotasının ve konumunun hassas kontrolünü sağlar. |
| Robotik Araçlar | Arazi koşullarında veya GPS sinyalinin olmadığı ortamlarda hareketleri takip eder. |
2. Havacılık ve Uzay
havacılık ve uzay ayrılmaz bir parçası olmuştur . Uçak ve uzay araçlarının yönelim ve hareketine ilişkin gerçek zamanlı veriler sağlarlar. IMU'lar hem ticari havacılıkta hem de uzay araştırmalarında ve GPS'in mevcut olmadığı veya pratik olmadığı zorlu ortamlarda yüksek güvenilirlik ve doğruluk sunar.
| Başvuru | IMU'nun Rolü |
|---|---|
| Uçak Navigasyonu | İstikrarlı uçuş için yönelim (duruş) verileri sağlar. |
| Uzay Aracı Navigasyonu | Uzayda hassas yönlendirme ve hareket kontrolü sağlar. |
| Uydu Yönlendirmesi | Çalışma sırasında uydunun yönünü ve yörüngesini korur. |
3. Robotik
Robotikte , robot kontrol sistemlerine geri bildirim sağlayarak çeşitli ortamlarda sorunsuz ve doğru hareket sağlar.
| Başvuru | IMU'nun Rolü |
|---|---|
| Endüstriyel Robotlar | Üretim işlemleri sırasında istikrarlı hareket sağlar. |
| Tıbbi Robotlar | Ameliyatlar ve rehabilitasyon süreçlerinde hassas hareket kontrolü sağlar. |
| Otonom Robotlar | Dinamik ortamlarda navigasyon için konum ve yönelim takibi yapar. |
4. Sanal Gerçeklik (VR) ve Artırılmış Gerçeklik (AR)
Sanal Gerçeklik (VR) ve Artırılmış Gerçeklik (AR) dünyasında , IMU'lar kullanıcıların baş ve vücut hareketlerini izlemek için önemli bileşenlerdir. Dönmeyi, ivmeyi ve bazen manyetik alanları ölçerek, IMU'lar sürükleyici deneyimi geliştiren gerçek zamanlı hareket verileri sağlar.
| Başvuru | IMU'nun Rolü |
|---|---|
| VR Kulaklıklar | Sanal ortamı ayarlamak için kafa hareketlerini takip eder. |
| AR Cihazları | Sanal nesnelerle etkileşim kurmak için el hareketlerini izler. |
| Hareket Kontrolü | AR/VR sistemlerinde etkileşim için kullanıcı hareketlerini tanır. |
5. Tıbbi Cihazlar
, hareket takibi, rehabilitasyon ve teşhis de dahil olmak üzere çeşitli amaçlar için tıbbi cihazlara giderek daha fazla entegre edilmektedir
| Başvuru | IMU'nun Rolü |
|---|---|
| Fiziksel Rehabilitasyon | Tedavi sırasında hastaların hareketlerini izleyerek ilerlemeyi takip eder. |
| Giyilebilir Cihazlar | Parkinson hastalığı gibi rahatsızlıkları olan hastalarda görülen hareket bozukluklarını takip eder. |
| Teşhis Amaçlı Hareket Yakalama | Teşhis amacıyla anormal hareketleri ölçer. |
6. Spor Analitiği ve Hareket Yakalama
, sporcuların performansını izlemek ve hareketlerini optimize etmek için spor analitiğinde ve hareket yakalamada yaygın olarak kullanılmaktadır
| Başvuru | IMU'nun Rolü |
|---|---|
| Atlet Performansı | Hız, ivme ve verimliliği analiz etmek için hareket verilerini izler. |
| Yaralanma Önleme | Hareketleri izleyerek riskleri belirler ve eğitimi optimize eder. |
| Hareket Yakalama | Film, animasyon ve oyunlarda kullanılmak üzere insan hareketlerini yakalar. |
7. Tüketici Elektroniği
akıllı telefonlar, giyilebilir cihazlar ve oyun kumandaları gibi tüketici elektroniği de entegre edilmiştir
| Başvuru | IMU'nun Rolü |
|---|---|
| Akıllı telefonlar | Ekran döndürme, hareket tabanlı kontroller ve etkinlik takibi özelliklerini etkinleştirir. |
| Fitness Takip Cihazları | Adım sayısını, kat edilen mesafeyi ve fiziksel aktiviteyi izler. |
| Oyun Kumandaları | Oyuncunun hareketlerini takip ederek sürükleyici oyun deneyimleri sunar. |
Atalet Ölçüm Birimi (IMU) Türleri: MEMS IMU ve FOG IMU Karşılaştırması
savunma ve havacılık başta olmak üzere birçok sektörde vazgeçilmezdir . İki ana IMU türü olan MEMS IMU'lar (Mikro-Elektro-Mekanik Sistemler) ve FOG IMU'lar (Fiber Optik Jiroskop IMU'lar) , performans, boyut, maliyet ve farklı uygulamalara uygunluk açısından önemli ölçüde farklılık gösterir.
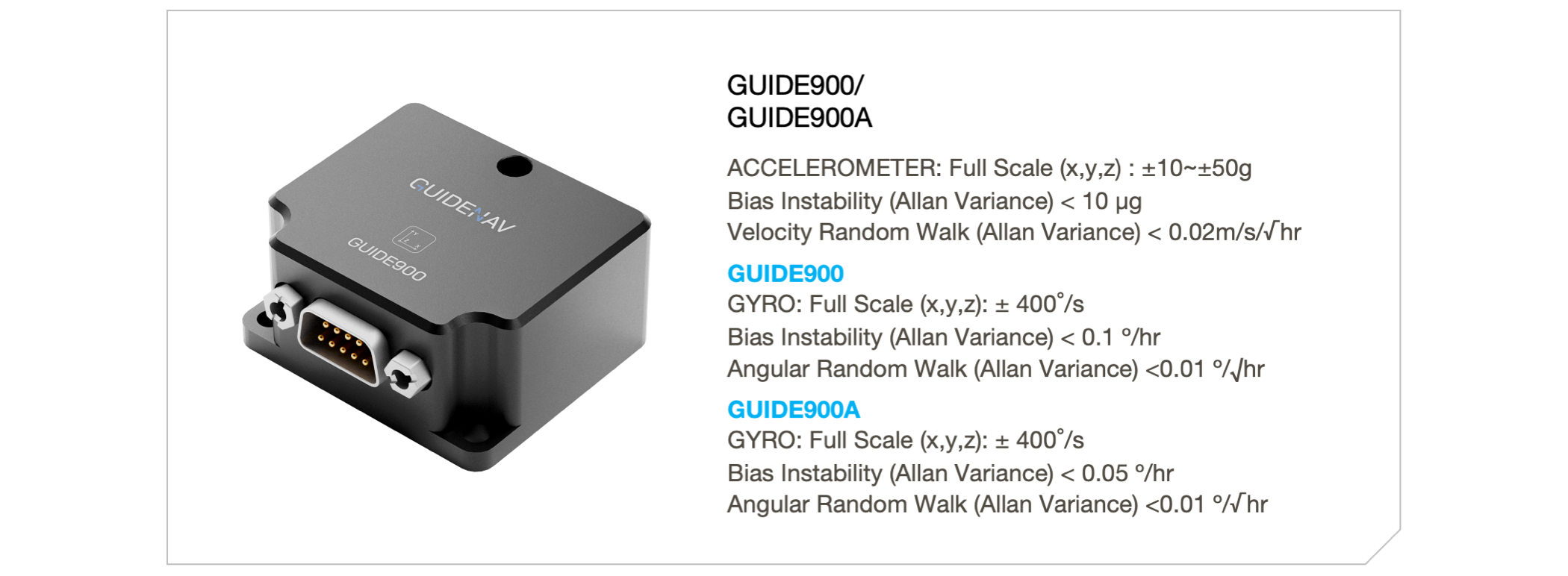
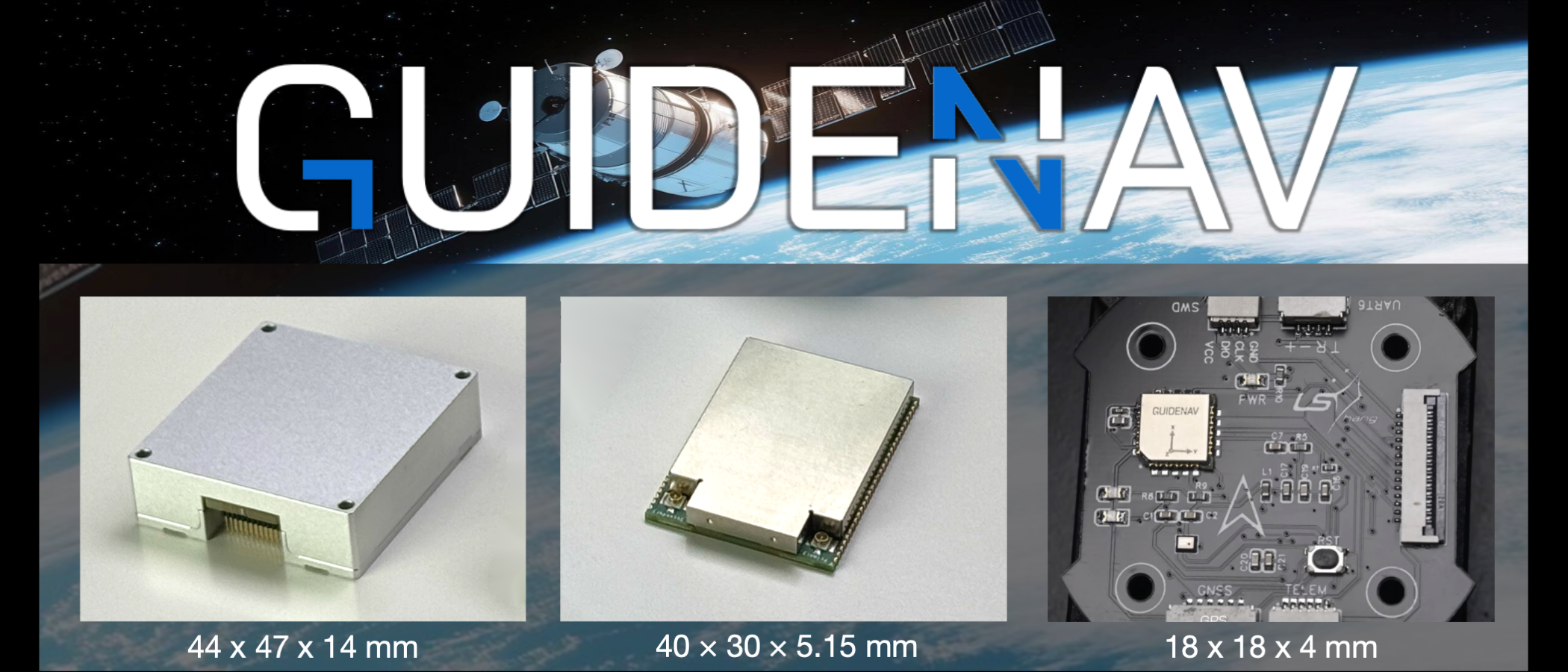
FOG IMU'lar geleneksel olarak havacılık, savunma ve robotik gibi yüksek hassasiyet gerektiren alanlarda kullanılsa da GUIDE900 ve GUIDE900A gibi MEMS IMU'lardaki , giriş seviyesi FOG IMU'larla , 0,1°/saat ve 0,05°/saat MEMS IMU'ların FOG IMU'ların hakimiyetinde olan yüksek hassasiyet gerektiren uygulamalarda kullanılmasını mümkün kılmaktadır .
MEMS IMU ve FOG IMU Arasındaki Temel Farklar
| Parametre | MEMS IMU | SİS IMU |
|---|---|---|
| Teknoloji | Mikro-Elektro-Mekanik Sistemler (MEMS) dayanmaktadır . | Açısal hız ölçümü için fiber optik jiroskoplar (FOG'lar) kullanır |
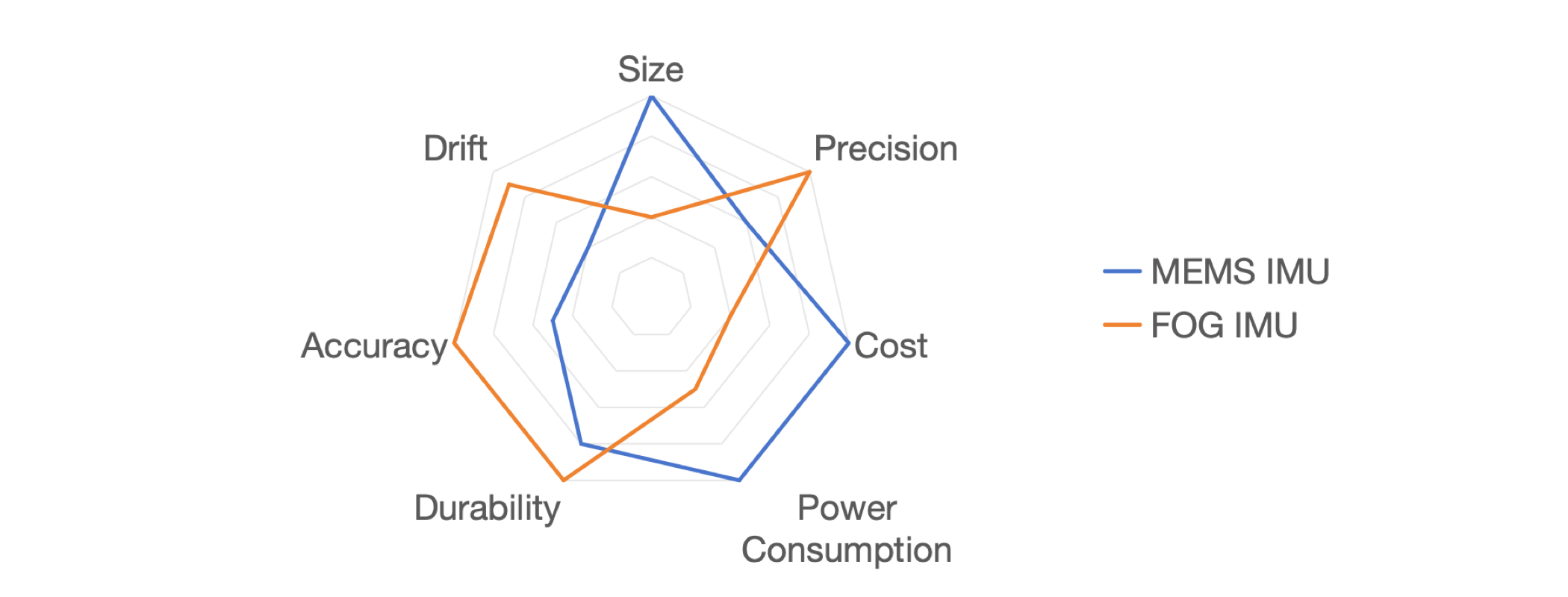
| Boyut | Kompakt ve hafif yapısıyla taşınabilir cihazlar için idealdir. | Daha büyük, daha sağlam, büyük ölçekli sistemlerde hassas uygulamalar için uygun. |
| Kesinlik | saatte 0,1° veya 0,05° hassasiyete ulaşabilmektedir . | Son derece yüksek hassasiyet, minimum sapma ve zamanla daha istikrarlı bir yapı. |
| Maliyet | Düşük maliyetleri, onları seri üretim uygulamaları için ideal hale getiriyor. | Üst düzey sistemlerde kullanılan ileri teknoloji nedeniyle maliyet daha yüksektir. |
| Güç Tüketimi | Düşük güç tüketimi , pille çalışan cihazlar için uygundur. | Daha yüksek güç tüketimi, daha yüksek enerji bütçesine sahip sistemler için daha uygundur. |
| Dayanıklılık | Aşırı çevresel koşullar altında daha az dayanıklıdır. | Son derece dayanıklı, zorlu ortamlara dayanabilir. |
| Kesinlik | Düşük ila orta hassasiyet gerektiren uygulamalar için uygundur. | Yüksek doğruluk, yüksek hassasiyetli navigasyon ve denge için uygundur. |
| Uygulamalar | Tüketici elektroniği, otomotiv sistemleri, dronlar, İHA'lar, **askeri sistemler**. | Havacılık ve uzay, savunma, endüstriyel robotik, üst düzey navigasyon sistemleri. |
| Sürüklenme | Zamanla sapma artar ve yeniden kalibrasyon gerektirir. | Çok düşük sapma oranı, yeniden kalibrasyon gerektirmeden uzun süreli kullanım için idealdir. |
| Yanıt Süresi | Daha küçük boyut ve daha basit tasarım sayesinde daha hızlı yanıt. | Tepki süresi biraz daha yavaş olsa da, zaman içinde daha yüksek istikrar sunar. |
MEMS IMU: Genel Bakış ve Özellikler
MEMS Atalet Ölçüm Birimleri (IMU'lar), küçük mekanik bileşenlerin bir mikroçip üzerinde elektroniklerle entegre edildiği Mikro-Elektro-Mekanik Sistemler (MEMS) kullanır küçük boyutları , düşük maliyetleri ve düşük güç tüketimleridir , MEMS IMU'ları tüketici elektroniği, otomotiv sistemleri ve giderek artan bir askeri uygulamalar hale getirir .
GuideNav olarak GUIDE900 ve GUIDE900A gibi MEMS IMU'larımızla gurur duyuyoruz 0,1°/saat ve 0,05°/saat doğruluk sağlayarak FOG IMU'larının hakim olduğu yüksek hassasiyetli için uygun hale geliyorlar .
MEMS IMU'ların Başlıca Özellikleri:
- Küçük Boyut Akıllı telefonlar , giyilebilir cihazlar ve askeri dronlar gibi kompakt uygulamalar için mükemmeldir .
- Düşük Maliyet Otomotiv sistemleri , tüketici elektroniği ve savunma sistemleri gibi yüksek hacimli uygulamalar için idealdir; bu sistemler performans ile uygun fiyatı dengelemelidir.
- Orta Düzey Hassasiyet : MEMS IMU'lar FOG IMU'lardan daha düşük doğruluk sunarken , yüksek hassasiyetli modeller artık birçok savunma uygulaması için bu açığı kapatıyor.
- Düşük Güç Tüketimi : Özellikle pille çalışan cihazlar için son derece verimli olup, askeri insansız hava araçları , akıllı silah sistemleri ve diğer mobil savunma teknolojileri için hayati öneme sahiptir.
MEMS IMU'ların Uygulamaları:
- Savunma Askeri insansız hava , zırhlı araçlar için navigasyon sistemlerinde ve füze güdüm sistemlerinde kullanılır MEMS IMU'ların kompaktlığı ve düşük maliyetinden faydalanır
- Tüketici Elektroniği Akıllı telefonlarda , fitness takip cihazlarında ve oyun kumandalarında bulunur .
- Otomotiv Sistemleri Araç denge kontrolü ve otonom navigasyonda kullanılır .
- Drone'lar ve İHA'lar Askeri drone'larda ve tüketici sınıfı İHA'larda yönlendirme ve stabilizasyon sağlama .
FOG IMU: Genel Bakış ve Özellikler
FOG IMU'lar, fiber optik jiroskoplar (FOG'lar) kullanır ; bu da onlara son derece yüksek hassasiyet ve kararlılık sağlar. Bu özellik, FOG IMU'ları havacılık navigasyonu , füze güdümü ve üst düzey robotik gibi minimum sapma ve uzun vadeli güvenilirlik gerektiren uygulamalar için ideal .
FOG IMU'lar hassasiyetleri ve dayanıklılıklarıyla yaygın olarak kabul görürken, MEMS IMU'lar maliyet, boyut ve güç tüketiminin önemli hususlar olduğu askeri uygulamalarda performans açısından aradaki farkı kapatıyor
FOG IMU'larının Başlıca Özellikleri:
- Yüksek Hassasiyet : FOG IMU'lar uydu navigasyonu ve askeri güdüm sistemleri gibi yüksek hassasiyet gerektiren uygulamalar için idealdir
- Dayanıklılık : Aşırı çevresel koşullara dayanabilme özelliğiyle FOG IMU'lar zorlu ortamlarda çalışması gereken havacılık ve askeri sistemler için idealdir
- Daha Yüksek Güç Tüketimi : FOG IMU'lar genellikle daha fazla güç tüketir, bu da onları yeterli enerji kaynaklarına sahip sistemler için daha uygun hale getirir.
- Daha Büyük Boyut : FOG IMU'lar, MEMS IMU'lara kıyasla daha hacimlidir uçak ve uzay aracı gibi daha büyük sistemlerde kullanılırlar .
FOG IMU'larının Uygulamaları:
- Havacılık ve Uzay Yüksek hassasiyet ve istikrarın kritik önem taşıdığı uçak ve uydu navigasyonunda kullanılır
- Savunma Füze güdüm , insansız askeri araçlarda ve askeri navigasyon sistemlerinde yaygın olarak kullanılır .
- Üst Düzey Robotik Hassasiyet ve uzun vadeli istikrarın gerekli olduğu endüstriyel robotik , cerrahi robotlar ve otonom navigasyon sistemlerinde kullanılır
MEMS IMU mu yoksa FOG IMU mu tercih edilmeli?
| Kullanım Durumu | MEMS IMU | SİS IMU |
|---|---|---|
| Tüketici Elektroniği | Akıllı telefonlar, giyilebilir cihazlar ve fitness takip cihazları için idealdir. | Yüksek maliyet ve enerji tüketimi nedeniyle uygun değildir. |
| Havacılık ve Uzay | Orta düzeyde hassasiyet gereksinimi olan düşük maliyetli, küçük sistemler için uygundur. | Yüksek hassasiyetli navigasyon ve yönlendirme sistemleri için vazgeçilmezdir. |
| Otonom Araçlar | Orta düzey performans gereksinimlerine sahip, düşük maliyetli çözümler için uygundur. | Karmaşık ortamlarda yüksek hassasiyetli navigasyon için gereklidir. |
| Askeri ve Savunma | **Askeri insansız hava araçlarında**, **araçlar için navigasyon sistemlerinde** ve **füze güdüm sistemlerinde** kullanılır. | Zorlu koşullarda füze güdümü, insansız hava araçları ve navigasyon için yaygın olarak kullanılır. |
| Robotik | Tüketiciye yönelik robotlar veya eğitim projeleri için uygundur. | Endüstriyel robotlar, cerrahi robotlar ve diğer hassas sistemler için tercih edilir. |
Atalet Ölçüm Birimi (IMU) Performansı ve Kalibrasyonu
Atalet Ölçüm Birimlerinin (IMU) performansı, sensör kayması, sıcaklık ve çevresel koşullar gibi çeşitli faktörlerden etkilenebilir. Optimum performansı sağlamak için, IMU'ların temel performans göstergelerini (KPI'lar) ve doğruluklarını artırmak için kullanılan kalibrasyon yöntemlerini anlamak çok önemlidir.
IMU Performans Göstergeleri
Atalet Ölçüm Biriminin (IMU) performansı, doğruluğunu ve güvenilirliğini doğrudan etkileyen çeşitli temel faktörlere göre değerlendirilir. Aşağıda IMU'lar için en önemli performans göstergeleri yer almaktadır:
| Performans Göstergesi | Tanım |
|---|---|
| Önyargı Kararlılığı | IMU'nun okumalarının zaman içindeki tutarlılığı. Stabil bir IMU, ölçümlerinde minimum sapma gösterecektir. |
| Ölçek Faktörü | Gerçek fiziksel hareket ile IMU'nun çıktısı arasındaki oran. Bu orandaki herhangi bir hata, verilerin yanlış yorumlanmasına yol açabilir. |
| Gürültü | IMU sensör okumalarında rastgele varyasyonlar. Düşük gürültü seviyeleri, ölçümlerde daha yüksek doğruluk anlamına gelir. |
| Rastgele Yürüyüş | Ölçümlerin zaman içindeki sapmasını tanımlar. Rastgele gürültü nedeniyle ölçümün gerçek değerinden ne kadar saptığını ifade eder. |
| Çözünürlük | IMU sensör okumalarındaki en küçük ölçülebilir değişiklik. Daha yüksek çözünürlük, ölçümlerin doğruluğunu artırır. |
| Doğrusal Olmayanlık | Giriş ve çıkış arasındaki doğrusal ilişkiden sapma. Doğrusal olmayan etkiler, daha yüksek ivmelerde veya açısal hızlarda hatalara neden olabilir. |
| Sıcaklık Hassasiyeti | Ortam sıcaklığındaki değişiklikler nedeniyle IMU ölçümlerinde varyasyon meydana gelir. Düşük sıcaklık hassasiyetine sahip IMU'lar, değişken çevre koşullarında daha doğru sonuçlar verir. |
IMU Kalibrasyon Yöntemleri
atalet ölçüm biriminin (IMU) doğruluğunu artırmaya yardımcı olan hayati bir süreçtir; sensör kayması, yanlış hizalama ve diğer faktörlerden kaynaklanabilecek hataları düzeltir. IMU kalibrasyonu tipik olarak üç temel sensör sistemini içerir: ivmeölçer , jiroskop ve manyetometre . Bu sensörlerin her biri, doğru ve güvenilir ölçümler sağlamak için belirli kalibrasyon teknikleri gerektirir.
1. İvmeölçer Kalibrasyonu
ivmeölçer , X, Y ve Z eksenleri boyunca doğrusal ivmeyi ölçer. Bununla birlikte, ölçek faktörü sapmaları, yanlış hizalamalar ve eksenlerin dik olmaması gibi hatalara sıklıkla maruz kalır.
| Kalibrasyon Yöntemi | Tanım |
|---|---|
| Statik Kalibrasyon | IMU'nun bilinen bir yönde (örneğin, düz bir yüzeye) yerleştirildiği yaygın bir yöntemdir. Yerçekimi ivmesi (9,81 m/s²) ölçülerek sensör hataları düzeltilebilir. |
| Dinamik Kalibrasyon | Bu işlem, ölçek faktörü hatalarını, sapmaları ve eksenler arasındaki hizalama sorunlarını düzeltmek için IMU'yu farklı bilinen ivmeler ve yönler boyunca hareket ettirmeyi içerir. |
| Sıcaklık Telafisi | İvmeölçerler sıcaklığa duyarlı olduğundan, kalibrasyon aynı zamanda ölçüm hatalarına neden olabilecek sıcaklık değişimlerinin telafi edilmesini de içerir. |

2. Jiroskop Kalibrasyonu
Jiroskop , IMU'nun X, Y ve Z eksenleri etrafındaki açısal hızı ölçer. Jiroskoplar, sapma (sensör okumalarının zamanla yavaşça değişmesi) ve sapma kararsızlığı (ölçümlerde sabit bir sapma olması) sorunlarından etkilenebilir.
| Kalibrasyon Yöntemi | Tanım |
|---|---|
| Sıfır Oran Ofset Kalibrasyonu | Bu yöntemde jiroskop sabit bir konumda (hareketsiz) yerleştirilir ve sapma veya önyargı ölçülerek düzeltilir. |
| Oran Tablosu Kalibrasyonu | Bu, doğrusal olmayan davranışları veya ölçek faktörü hatalarını belirlemek için IMU'yu farklı bilinen açısal hızlarda döndürmeyi içerir. |
| Sıcaklık Kalibrasyonu | İvmeölçerlere benzer şekilde, jiroskoplar da sıcaklık değişimlerine duyarlıdır. Kalibrasyon, sensörün farklı sıcaklıklardaki davranışındaki varyasyonları hesaba katar. |
Jiroskopun kalibrasyonu, IMU'nun açısal hız okumalarının doğru ve sapmasız olmasını sağlayarak dinamik ortamlardaki performansını artırır.
3. Manyetometre Kalibrasyonu
Manyetometre , Dünya'nın manyetik alanının gücünü ve yönünü ölçerek yön belirleme için kullanılan yönelim verilerini sağlar. Manyetometreler, yerel manyetik bozulmalardan, sensör hizalama hatalarından ve ölçek faktöründeki hatalardan etkilenebilir.
| Kalibrasyon Yöntemi | Tanım |
|---|---|
| Sert Demir Kalibrasyonu | Bu yöntem, IMU'nun kendi bileşenlerinden (örneğin, elektronik cihazlardan) kaynaklanan manyetik alan bozulmalarını telafi eder. |
| Yumuşak Demir Kalibrasyonu | IMU'nun yakınındaki çevresel koşullar veya malzemelerden kaynaklanan bozulmaları düzeltir. |
| Çok Noktalı Kalibrasyon | Manyetometre, hataları tespit etmek ve düzeltmek için çeşitli bilinen manyetik alan şiddetlerine ve yönlerine maruz bırakılır. |
Manyetometre kalibrasyonu, özellikle IMU'nun manyetik koşulların değişken olduğu ortamlarda kullanılması durumunda, doğru yön ve yönelim verileri elde etmek için çok önemlidir.
Atalet Ölçüm Birimlerinin (IMU) Avantajları ve Sınırlamaları
Atalet Ölçüm Birimleri (IMU'lar), olağanüstü gerçek zamanlı performans, harici sistemlerden bağımsızlık sapmaları , çevresel hassasiyetleri ve yüksek maliyetli hassas modelleri dikkate alınmalıdır. MEMS IMU'lar maliyet ve performans arasında bir denge kurarken , FOG IMU'lar yüksek hassasiyetli , uzun süreli için tercih edilen seçenektir . IMU'ların güçlü ve zayıf yönlerini anlamak, özel ihtiyaçlarınız için en iyi sistemi seçmenize yardımcı olur.
Atalet Ölçüm Birimlerinin Avantajları
| Avantaj | Tanım |
|---|---|
| Dinamik Ortamlarda Yüksek Hassasiyet | IMU'lar, GPS veya diğer harici referansların bulunmadığı otonom araçlar , havacılık ve robotik uygulamalarında hayati önem taşıyan ivme ve açısal hızın gerçek zamanlı ölçümlerini |
| Dış Sinyallerden Bağımsızlık | GPS gibi harici sinyallere ihtiyaç duymadan çalışırlar yer altı navigasyonu , uzay araştırması veya iç mekan robotik uygulamaları gibi ortamlarda son derece güvenilir kılar . |
| Kompakt ve Hafif | MEMS IMU'lar küçük ve hafiftir; bu da onları giyilebilir cihazlar , dronlar ve tüketici elektroniği alan ve ağırlığın kritik olduğu uygulamalar için ideal kılar. |
| Düşük Güç Tüketimi | MEMS IMU'lar enerji tasarrufludur ve akıllı saatler ve fitness takip cihazları gibi uzun süre çalışması gereken pille çalışan cihazlar |
| Gerçek Zamanlı Veri İşleme | için robotikte , drone stabilizasyonunda ve araç navigasyonunda gerçek zamanlı kontrol için uygundurlar . |
| Zorlu Ortamlarda Dayanıklılık | FOG IMU'lar ve bazı üst düzey MEMS IMU'lar, yüksek titreşim , sıcaklık değişimleri ve şoklar gibi aşırı koşullara dayanabildikleri için askeri ve havacılık uygulamaları için idealdir |
Atalet Ölçüm Birimlerinin Sınırlamaları
| Sınırlama | Tanım |
|---|---|
| Zaman İçinde Sürüklenme | IMU'lardaki jiroskoplar zamanla sapma hatalı ölçümlere . Bu, uzun süreli uygulamalarda önemli bir sorundur. |
| Çevresel Duyarlılık | bu tür bozulmalara daha yatkın olan MEMS IMU'larda hatalara yol açabilen sıcaklık ve titreşim gibi çevresel koşullara karşı hassastır |
| Yüksek Maliyet (Yüksek Hassasiyetli Modeller İçin) | MEMS IMU'lar maliyet açısından verimli olsa da FOG IMU'lar gibi yüksek hassasiyetli IMU'lar pahalıdır ve yüksek maliyetleri ve güç tüketimleri nedeniyle tüm uygulamalar için uygun olmayabilir. |
| Kısa Vadeli Doğruluk vs. Uzun Vadeli İstikrar | IMU'lar kısa vadede yüksek doğruluk , ancak harici düzeltme (örneğin GPS uzun vadede istikrarsızlık yaşarlar; bu da uzun süreler boyunca yüksek hassasiyetli navigasyon görevleri için bir zorluk teşkil eder. |
| Veri Birleştirmede Karmaşıklık | IMU'lar, zaman içinde oluşan hataları düzeltmek için genellikle sensör füzyonuna GPS , manyetometre entegrasyonu ) ihtiyaç duyar; bu da sisteme karmaşıklık ve hesaplama yükü ekler. |
| Yüksek Dinamiklerde Sınırlı Doğruluk | Yüksek dinamik aralıklı uygulamalarda , özellikle füze güdümü veya uzay aracı yönlendirmesi ultra yüksek hassasiyet gerektiren uygulamalarda MEMS IMU'lar FOG IMU'ların hassasiyetine ulaşamayabilir |
Atalet Ölçüm Birimi (IMU) ve Diğer Atalet Sistemleri: IMU vs AHRS, IMU vs INS
Atalet Ölçüm Birimleri (IMU'lar) birçok yüksek teknoloji uygulamasında temel öneme sahiptir, ancak hareket, yönelim ve navigasyonu ölçmek için mevcut tek sistemler değildir. Yön ve Başlık Referans Sistemleri (AHRS) ve Atalet Navigasyon Sistemleri (INS) IMU'ların AHRS ve INS ile nasıl karşılaştırıldığını inceleyelim .
IMU ve AHRS (Yön ve Konum Referans Sistemi) Karşılaştırması
IMU'lar ve AHRS'ler , yönelim ve hareket takibi için kullanılır, ancak ek özellikler ve kullanım alanları bakımından farklılık gösterirler.
| Parametre | IMU | AHRS |
|---|---|---|
| Tanım | **Atalet Ölçüm Birimi (IMU)**, ivmeyi ve açısal hızı ölçerek ham hareket verileri sağlar. | **Yön ve Yön Referans Sistemi (AHRS)**, yönelim ve yön verileri sağlamak için **IMU verilerini** ek sensörlerle (örneğin, manyetometreler) birleştirir. |
| Bileşenler | Genellikle **ivmeölçerler** ve **jiroskoplar**, bazen de **manyetometreler** içerir. | **IMU verilerini** (ivmeölçerler ve jiroskoplar) ve **manyetometreleri**, bazen de diğer sensörleri (örneğin, **GPS**, **barometreler**) kullanır. |
| Çıktı | Ham ivme ve açısal hız verilerini sağlar. | Küresel bir çerçevede (örneğin, Kuzey, Doğu, Aşağı) yönelim (duruş) ve yön (pusula yönü) bilgilerini verir. |
| Kesinlik | IMU'lar doğru hareket takibi sağlar ancak sensör hataları nedeniyle zamanla **sapma** yaşayabilirler. | AHRS, harici referanslar (manyetometreler, GPS) kullanarak doğruluğu artırır ve zaman içindeki sapmayı azaltır. |
| Karmaşıklık | Tasarımı ve kullanımı daha basittir, genellikle temel hareket takibi için kullanılır. | Eklenen unsurlar nedeniyle daha karmaşık |
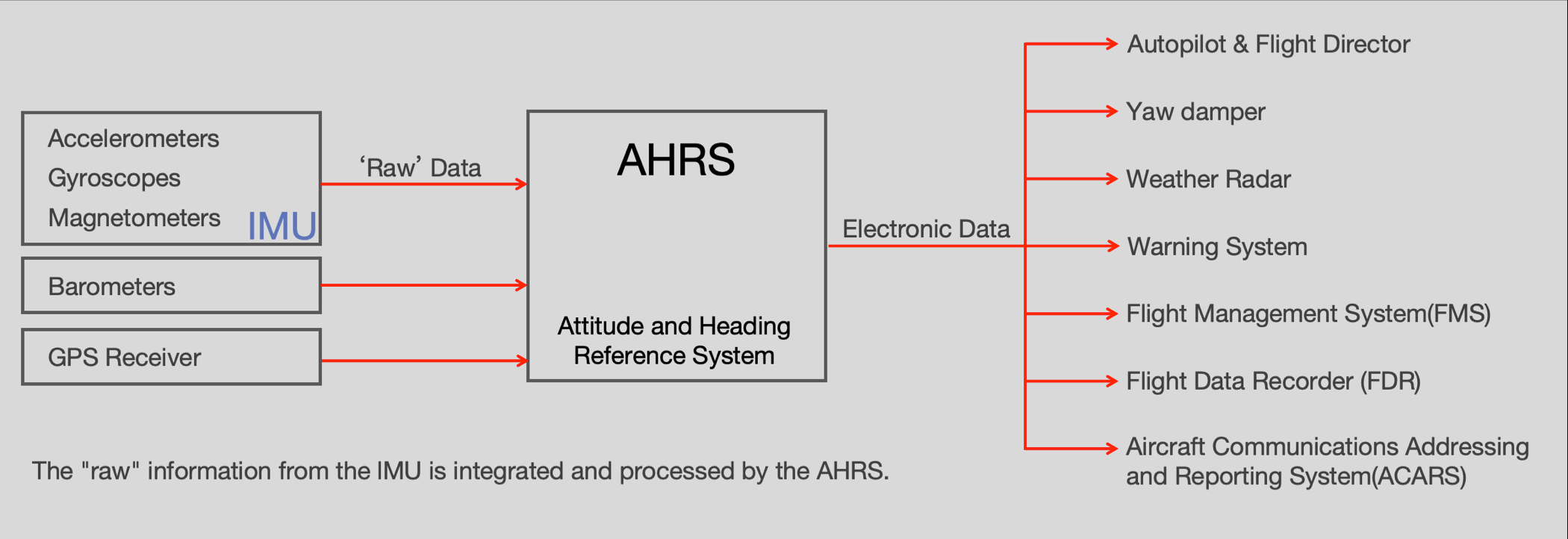
Temel Fark : IMU'lar ham sensör verileri sağlarken, AHRS bu verileri diğer sensörlerle (manyetometreler gibi) birleştirerek hassas yönelim ve yön bilgisi sunar. AHRS genellikle hassas pozisyon ve yön bilgisine ihtiyaç duyulduğunda kullanılır.
IMU ve INS (Ataletli Navigasyon Sistemi) Karşılaştırması
Ataletsel Navigasyon Sistemi (INS), IMU verilerini ek işlem yetenekleriyle entegre eden, genellikle Kalman filtreleme gibi algoritmalar bir nesnenin konumunu, hızını ve yönünü hesaplayan daha gelişmiş bir sistemdir
| Parametre | IMU | INS |
|---|---|---|
| Tanım | **Atalet Ölçüm Birimi (IMU)**, ivmeyi ve açısal hızı ölçerek ham hareket verileri sağlar. | Bir **Ataletli Navigasyon Sistemi (INS)**, konum, hız ve yönelim takibi için bir **IMU**'yu hesaplamalı işlemle (örneğin, Kalman filtresi) birleştirir. |
| Bileşenler | **İvmeölçerler** ve **jiroskoplar** içerir; bazen **manyetometreler** de içerebilir. | Bir **IMU**, sensör füzyonu için **algoritmalar** ve bazen diğer sensörleri (örneğin, **GPS**) bir araya getirir. |
| Çıktı | İvme ve açısal hız verilerini sağlar. | **Konum**, **hız** ve **yön** bilgilerini vererek eksiksiz navigasyon verileri sunar. |
| Kesinlik | IMU'ların zaman içindeki sapma nedeniyle doğrulukları sınırlıdır. | **INS**, IMU verilerini algoritmalarla ve bazen de harici düzeltmelerle (örneğin GPS) birleştirerek zaman içinde doğruluğunu artırır. |
| Karmaşıklık | Basit, sadece hareket verisi sağlıyor. | Veri birleştirme, sensör işleme ve hesaplama algoritmalarına duyulan ihtiyaç nedeniyle karmaşıktır. |
| Uygulamalar | İnsansız hava araçları, otomotiv ve robotik gibi alanlarda temel hareket takibi için kullanılır. | Uzun süreli konum takibinin kritik önem taşıdığı **uçaklarda**, **denizaltılarda**, **uzay araçlarında** ve **askeri uygulamalarda** **navigasyon** amacıyla kullanılır. |
Temel Fark : IMU'lar hareketi ve yönü ölçerken, INS zaman içinde konum , hız ve yönü hesaplar
Atalet Ölçüm Birimi Pazarı ve Gelecek Gelişimi: Türleri, Pazar Görünümü ve Trendler
Atalet Ölçüm Birimleri (IMU'lar), çeşitli sektörlerdeki modern navigasyon, hareket izleme ve denge kontrol sistemlerinin ayrılmaz bir parçasıdır. Otonom sistemlere , robotiklere , havacılığa ve tüketici elektroniğine , IMU teknolojilerinin evrimini tetikleyerek dünya çapında benimsenmelerini artırmıştır. IMU pazarı genişlemeye devam ederken, farklı IMU türlerini, mevcut pazar koşullarını ve gelecekteki gelişimlerini şekillendiren trendleri anlamak çok önemlidir.
Farklı IMU Türleri ve Piyasa Genel Bakışı
IMU'lar, farklı doğruluk, boyut, maliyet ve performans gereksinimlerine hitap eden çeşitli biçimlerde gelir. En yaygın kullanılan IMU türleri MEMS IMU'lar , FOG IMU'lar ve RLG IMU'lardır (Halka Lazer Jiroskop IMU'ları) . Her birinin kendine özgü özellikleri vardır ve bu da onları belirli uygulamalar için uygun hale getirir. Bu türlere ve mevcut pazar durumlarına bir göz atalım.
1. MEMS IMU'lar
MEMS IMU'lar, kompakt boyutları , düşük maliyetleri ve düşük güç tüketimleri nedeniyle en yaygın kullanılan IMU'lardır . Bu IMU'lar, ivmeyi ve açısal hızı ölçmek için mikroelektromekanik sistem (MEMS) sensörlerine dayanır. MEMS IMU'lar, tüketici elektroniği, otomotiv uygulamaları ve düşük maliyetli sistemler için oldukça uygundur.
| Özellik | MEMS IMU |
|---|---|
| Boyut | Kompakt , küçük ve hafif. |
| Maliyet | Düşük maliyetleri sayesinde geniş kitleler tarafından benimsenmeleri için uygun fiyatlıdırlar. |
| Kesinlik | Orta düzeyde hassasiyet, ancak daha yeni modeller daha yüksek doğruluk elde ediyor (örneğin, **0,1°/saat**). |
| Uygulamalar | **Tüketici elektroniği**, **otomotiv sistemleri**, **dronlar**, **robotik** ve **giyilebilir teknolojiler** alanlarında kullanılır. |
| Pazar Büyümesi | Akıllı telefonlar, otomotiv güvenliği, drone teknolojisi ve Nesnelerin İnterneti (IoT) cihazlarının öncülüğünde güçlü bir büyüme yaşanıyor. |
MEMS IMU'lar için Piyasa Görünümü:
MEMS IMU'larının pazarının, uygun fiyatları ve çok yönlülükleri nedeniyle büyümeye devam etmesi bekleniyor. Bu IMU'lar giderek artan bir şekilde akıllı telefonlarda , giyilebilir cihazlarda , otomotiv güvenlik sistemlerinde , drone stabilizasyonunda ve robotikte . Otomotiv ve tüketici elektroniği sürücüsüz araçların ve IoT (Nesnelerin İnterneti) artan kullanımıyla birlikte büyümenin temel itici güçleri olmaya devam ediyor .
2. FOG IMU'lar (Fiber Optik Jiroskop IMU'ları)
FOG IMU'lar yüksek hassasiyet ve düşük sapma sunarak havacılık , savunma ve navigasyon sistemleri için idealdir . FOG'lar açısal hızı ölçmek için fiber optik teknolojisini kullanır ve aşırı koşullarda sağlamlıklarıyla bilinirler.
| Özellik | SİS IMU |
|---|---|
| Boyut | MEMS IMU'lardan daha büyük ve daha sağlam olan bu üniteler, yüksek hassasiyet gerektiren uygulamalar için tasarlanmıştır. |
| Maliyet | **Daha yüksek maliyetleri**, onları **havacılık ve uzay** ve **askeri** sektörlerdeki özel uygulamalar için uygun hale getiriyor. |
| Kesinlik | **Yüksek hassasiyet** ve minimum sapma ile **havacılık**, **savunma** ve **navigasyon sistemlerinde** **uzun vadeli istikrar** için idealdir. |
| Uygulamalar | Havacılık ve uzay sanayinde, askeri savunmada, üst düzey navigasyon sistemlerinde ve hassas yönlendirme sistemlerinde kullanılır. |
| Pazar Büyümesi | Havacılık ve uzay, askeri ve yüksek hassasiyetli navigasyon sektörlerinde istikrarlı bir büyüme var, ancak yüksek maliyetler bu büyümeyi sınırlıyor. |
FOG IMU'lar için Piyasa Görünümü:
FOG IMU havacılık , askeri savunma ve yüksek hassasiyetli navigasyon istikrarlı bir şekilde büyümesi bekleniyor Otonom araçlara , uzay araştırmalarına ve füze güdüm sistemlerine yönelik artan talep, FOG IMU'ların benimsenmesini sağlayacaktır. Bununla birlikte, yüksek maliyetleri ve güç tüketimleri, özellikle düşük maliyetli tüketici uygulamalarında, daha geniş pazar penetrasyonu için sınırlayıcı faktörler olmaya devam etmektedir.
3. RLG IMU'lar (Halka Lazer Jiroskop IMU'ları)
RLG IMU'lar, FOG IMU'lara benzer ancak halka lazer jiroskopları son derece yüksek hassasiyet bilinir ve genellikle askeri, havacılık ve diğer yüksek performanslı sektörlerde kullanılır.
| Özellik | RLG IMU |
|---|---|
| Boyut | **FOG IMU'larına** benzer, **daha büyük** ve daha sağlam olan bu sensörler, zorlu ortamlardaki **yüksek hassasiyetli uygulamalar** için tasarlanmıştır. |
| Maliyet | **Çok yüksek maliyetli**, genellikle **havacılık** ve **askeri** sektörlerdeki üst düzey, görev açısından kritik sistemler için ayrılmıştır. |
| Kesinlik | **Son derece yüksek hassasiyet** ve minimum sapma ile, genellikle **uzay aracı navigasyonunda** ve **askeri füze güdüm sistemlerinde** kullanılır. |
| Uygulamalar | **Askeri**, **uzay araçlarında**, **uydu navigasyonunda** ve diğer **yüksek hassasiyetli savunma sistemlerinde** kullanılır. |
| Pazar Büyümesi | Niş bir alan olmasına rağmen, **RLG IMU'lar**, **yüksek performanslı savunma**, **havacılık** ve **uzay sistemleri** için kritik önem taşımaya devam ediyor. Yüksek maliyetler nedeniyle pazar istikrarlı ve mütevazı bir büyüme gösteriyor. |
RLG IMU'lar için Piyasa Görünümü:
Yüksek maliyeti nedeniyle RLG IMU da özellikle füze güdüm ve uydu yönlendirme sistemleri askeri savunma ve havacılık . RLG IMU'lar bu sektörlerde kritik bir rol oynamaya devam edecek ancak FOG IMU'lardan ve gelişmekte olan teknolojilerden rekabetle karşılaşabilir.
Atalet Ölçüm Biriminin Gelecek Trendleri ve Gelişimi
IMU'ların geleceği, sensör teknolojisindeki gelişmeler, veri işleme algoritmaları ve çeşitli sektörlerde hassas sistemlere yönelik artan talep tarafından yönlendirilen birkaç önemli gelişmeyle şekillenmektedir. İşte başlıca trendlerden bazıları:
1. Minyatürleştirme ve Diğer Sensörlerle Entegrasyon
Kompakt ve verimli sistemlere olan talep arttıkça IMU'ların minyatürleştirilmesine yönelik artan bir eğilim de söz konusudur . MEMS IMU'lar gelişmeye devam ederek daha da küçülecek, daha uygun maliyetli ve daha güçlü hale gelecektir. Ek olarak, sensör füzyonu, manyetometreler , GPS ve barometreler gibi diğer sensörlerle entegre edildiği önemli bir geliştirme alanıdır .
2. Daha Düşük Maliyetle Yüksek Hassasiyet
MEMS IMU son gelişmeler, daha düşük maliyetle yüksek hassasiyet elde etme eğilimini tetikliyor GUIDE900 ve GUIDE900A gibi modeller saatte 0,1° ve 0,05° elde edebiliyor FOG IMU'larla aradaki farkı kapatıyor . Bu, MEMS IMU'ların FOG IMU'ların hakimiyetinde olan havacılık ve askeri de dahil olmak üzere yüksek hassasiyet gerektiren kullanılacağı .
3. Otonom Sistemlerde Entegrasyon
otonom araçların , dronların ve robotik sistemlerin geliştirilmesinde ayrılmaz bir rol oynamaktadır Otonom navigasyon ve hassas hareket kontrolüne olan artan ilgi, gelişmiş IMU'lara olan talebi artıracaktır. IMU'ların yapay zeka algoritmaları ve makine öğrenimi , sistemlerin gerçek dünya ortamlarına daha etkili bir şekilde uyum sağlamasını mümkün kılmaktadır.
4. Yapay Zeka ve Sensör Füzyonunun Kullanımı
Yapay zeka algoritmaları, IMU veri işlemede giderek daha önemli bir rol oynayacak IMU verilerini diğer sensör girdileriyle birleştirerek makine öğrenimi , otonom sistemler daha doğru tahminler ve ayarlamalar yapabilecek. IMU'ların görüş sistemleri , LiDAR ve radar , gerçek zamanlı navigasyon ve stabilizasyonun sınırlarını zorlaması bekleniyor.
5. Geliştirilmiş Dayanıklılık ve Çevresel Direnç
aşırı sıcaklıklar, titreşim ve elektromanyetik girişim gibi zorlu koşullara karşı sağlam ve dayanıklı hale gelmesi bekleniyor FOG IMU'lar ve MEMS IMU'lar, havacılık , savunma ve endüstriyel uygulamalardaki artan talebi karşılamak üzere gelişecektir .
