
2025 Yılında En İyi 10 FOG Atalet Ölçüm Birimi (IMU) Tedarikçisi
Honeywell, Exail, GuideNav ve daha fazlasını içeren 2025'in en iyi 10 fiber optik IMU tedarikçisini keşfedin. Havacılık ve savunma uygulamaları için sapma kayması, ihracat kontrolü ve taktiksel performansı karşılaştırın.
Ataletli Seyir Sistemlerinde Hata Kaynakları ve Telafi Teknikleri
Ataletli navigasyonun doğruluğu nihayetinde sensör hatalarının ne kadar iyi modellendiği ve telafi edildiğiyle sınırlıdır. Sapma kaymasından rastgele yürüyüşe kadar, etkili bir azaltma, donanım tasarımı, kalibrasyon rutinleri ve gerçek zamanlı algoritmik düzeltmenin bir kombinasyonunu gerektirir.
10 Eksenli MEMS IMU'lar Hakkında Açıklama: Bileşenler, Faydalar ve Kullanım Alanları
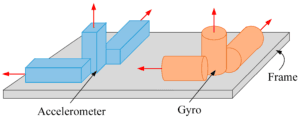
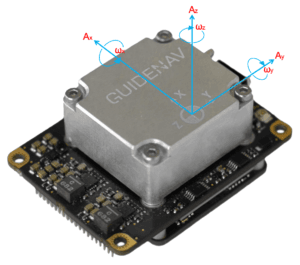
10 eksenli bir MEMS IMU, jiroskopları, ivmeölçerleri, manyetometreleri ve barometreyi tek bir kompakt modülde birleştirerek geleneksel 3 eksenli veya 6 eksenli sensörlere göre önemli bir ilerleme sunar. Bu daha zengin sensör birleşimi, yalnızca hareket takibini değil, aynı zamanda karmaşık veya GPS sinyalinin olmadığı ortamlarda güvenilir navigasyon, kontrol ve denge için hayati önem taşıyan mutlak yön ve yükseklik farkındalığını da mümkün kılar.
Doğru MEMS ivmeölçer nasıl seçilir?
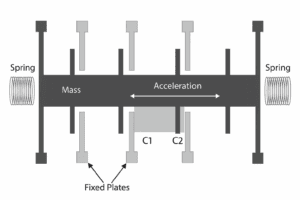
MEMS ivmeölçer seçimi sadece teknik özelliklerdeki rakamlarla ilgili değildir. Termal kayma, titreşim dayanıklılığı ve saha koşullarındaki sapma kararlılığı gibi gerçek dünya faktörleri, sistem performansını belirleyen en önemli noktalarda önemli rol oynar. Bu kılavuz, savunma, havacılık ve robotik platformlarında gerçekten önemli olan konulara odaklanmaktadır.
2025'te Taktiksel Navigasyonu Şekillendirecek En Önemli 6 IMU Teknoloji Trendi
2025'te taktiksel güdüm sistemlerini yeniden tanımlayacak 6 temel IMU trendini keşfedin: MEMS atılımları, FOG hassasiyeti, yapay zeka kalibrasyonu, IMU dizileri, SWaP optimizasyonu ve GPS'siz navigasyon.
EMCORE DSP-3000 FOG'un Analizi: Güçlü Yönleri, Kullanım Alanları ve Karşılaştırması
EMCORE DSP-3000 ve GuideNav GSF30 fiber optik jiroskoplarını karşılaştırın. GSF30'un, İHA'lar, gimbal sistemleri ve gömülü platformlar için ideal olan kompakt, düşük güç tüketimli bir tasarımda taktiksel düzeyde performansı nasıl sağladığını keşfedin.