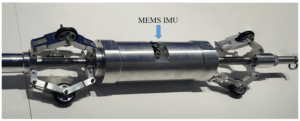
MEMS IMU'nun Boru Hattı İnceleme Robotlarında Uygulanması
MEMS IMU'lar, GNSS sinyalinin bulunmadığı ortamlarda çalışan boru hattı inceleme robotları için hassas ataletsel navigasyon sağlar. İstikrarlı tutum, hız ve konum verileri sağlayarak, dar yeraltı veya denizaltı boru hatlarında güvenilir hata haritalaması, düzgün yörünge kontrolü ve sürekli çalışma sağlarlar.

Yüksek Hassasiyetli MEMS IMU'ların Kullanımındaki Gizli Tuzaklar: Her Entegratörün Bilmesi Gerekenler
Yüksek hassasiyetli MEMS IMU'lar, eşsiz hareket algılama performansı sunar; ancak bu performans yalnızca doğru kullanıldığında geçerlidir. Bu makale, doğruluk kaybına sıklıkla neden olan dört kritik kullanım hatasını ve bunların gerçek dünya entegrasyonunda nasıl önleneceğini ortaya koymaktadır.
Honeywell MEMS IMU HG1930'un Avantajları ve Dezavantajları
Honeywell HG1930, insansız hava araçları, robotik ve savunma sistemleri için güvenilir performans ve sağlam tasarım sunan kompakt, taktik sınıf bir MEMS IMU'dur. Zorlu ortamlarda istikrarlı doğruluk sağlar, ancak daha yüksek maliyet ve ihracat kısıtlamalarıyla birlikte gelir.

Otonom Sürüşün Arkasındaki INS Tabanlı Konum Belirleme Teknolojisinin İç Yüzü
Otonom araçlar, GNSS/INS entegrasyonu, LiDAR haritalama ve görsel algılama yoluyla santimetre düzeyinde doğruluk elde ederken, GPS sinyallerinin kesilmesi durumunda yüksek hassasiyetli IMU'lar konum belirlemenin temelini oluşturur.

IMU tek başına odometri yapabilir mi?
Bir IMU teorik olarak çift entegrasyon yoluyla odometri hesaplayabilir, ancak sapma ve gürültü zamanla üstel olarak kaymaya neden olur. Bu nedenle gerçek dünya navigasyon sistemleri, hassasiyet ve istikrarı korumak için IMU'nun GNSS, LiDAR veya kameralarla birleştirilmesine güvenir.
FOG IMU'yu Ne Zaman Yeniden Kalibre Etmeli veya Değiştirmelisiniz?
Sapma kararlılığını korumak için FOG IMU'nuzu 12-24 ayda bir yeniden kalibre edin. Uzun vadeli navigasyon güvenilirliğini sağlamak için 5-8 yıl sonra veya sapma belirtilen değerleri aştığında değiştirin.