On yılı aşkın süredir atalet sensörleriyle çalıştıktan sonra, sistem gereksinimlerinin ne kadar hızlı geliştiğini bizzat gördüm. Birkaç yıl önce, çoğu navigasyon ve kontrol görevi için sadece jiroskop ve ivmeölçerlerden oluşan 6 eksenli bir IMU yeterliydi. Ancak durum artık böyle değil. Günümüz platformları sadece hareketten daha fazlasını talep ediyor; yönelim, yükseklik ve çevresel farkındalık da gerekiyor. Bu nedenle, 10 eksenli MEMS IMU'lar karmaşık uygulamalar için tercih ettiğim çözüm haline geldi. Bir manyetometre ve bir barometrik sensör ekleyerek, iki ekstra veri boyutu elde ediyoruz: mutlak yön ve dikey konumlandırma. Bunlar sadece sayılar değil; GNSS'nin erişilemediği bölgelerde istikrarlı kontrol, doğru iç mekan konumlandırması ve çok katmanlı ortamlarda hassasiyet sağlayan unsurlardır. Ne kadar çok veriye sahip olursak, o kadar çok sorunu çözebiliriz.
10 eksenli bir MEMS IMU, jiroskopları, ivmeölçerleri, manyetometreleri ve barometreyi tek bir kompakt modülde birleştirerek geleneksel 3 eksenli veya 6 eksenli sensörlere göre önemli bir ilerleme sunar. Bu daha zengin sensör birleşimi, yalnızca hareket takibini değil, aynı zamanda karmaşık veya GPS sinyalinin olmadığı ortamlarda güvenilir navigasyon, kontrol ve denge için çok önemli olan mutlak
Her bir sensörün nasıl çalıştığını ve neden önemli olduğunu öğrenmek ister misiniz? Gelin tüm bileşenleri inceleyelim.

İçindekiler
“10 Eksen” Gerçekte Ne Anlama Geliyor?
Endüstriyel terminolojide, 10 eksenli bir MEMS IMU tipik olarak dört sensör tipini tek bir kompakt modülde birleştirir:
- Dönme hareketi için 3 eksenli jiroskoplar
- Doğrusal ivme ve eğim için 3 eksenli ivmeölçerler
- Mutlak yön belirleme için 3 eksenli manyetometreler
- Rakım tahmini için 1 eksenli barometrik basınç sensörü
Bu kombinasyon, 10 derecelik tam bir atalet ve çevresel algılama olanağı sunarak mühendislere, özellikle GNSS'nin yetersiz olduğu ortamlarda, platform hareketi ve mekansal yönelim hakkında daha zengin ve eksiksiz bir bilgi edinme imkanı sağlar.

10 Eksenli MEMS IMU'ların Merkezinde Jiroskop-Açısal Hız Ölçümü
Jiroskop, herhangi 10 eksenli MEMS IMU'nun temelini oluşturur ve X, Y ve Z eksenleri boyunca hassas açısal hız verileri sağlar. Hızlı hareket eden platformlar için gerçek zamanlı yönelim tahmini ve stabilizasyonunu . Taktiksel sistemlerde düşük sapma ve yüksek tepki hızı çok önemlidir.
Başlıca Parametreler:
| Sensör | Parametre | Tanım |
|---|---|---|
| Jiroskop | Açısal aralık | Üç eksenli tam dönme hareketini ölçer |
| Önyargı istikrarsızlığı | Uzun vadeli sapma düzeltmesini destekler | |
| Gürültü performansı | Sorunsuz ve titreşimsiz izleme sağlar | |
| Bant genişliği ve çıkış hızı | Hızlı yanıt için yüksek frekanslı veriler |
İvmeölçer – Hassas Navigasyon için Doğrusal Hareket ve Titreşim Algılama
10 eksenli bir ivmeölçer , , özellikle ölü hesaplama veya GNSS'nin olmadığı koşullarda hareket, titreşim ve eğim yönünün
Başlıca Parametreler:
| Sensör | Parametre | Tanım |
|---|---|---|
| İvmeölçer | Hızlanma aralığı | Şoku, hareketi ve eğimi algılar |
| Önyargı istikrarsızlığı | Yüksek çözünürlüklü atalet algılama olanağı sağlar | |
| Gürültü seviyesi | Yanlış hareket tetikleyicilerini azaltır | |
| Bant genişliği ve yanıt süresi | Yüksek dinamik aralıklı ortamlara uygundur |
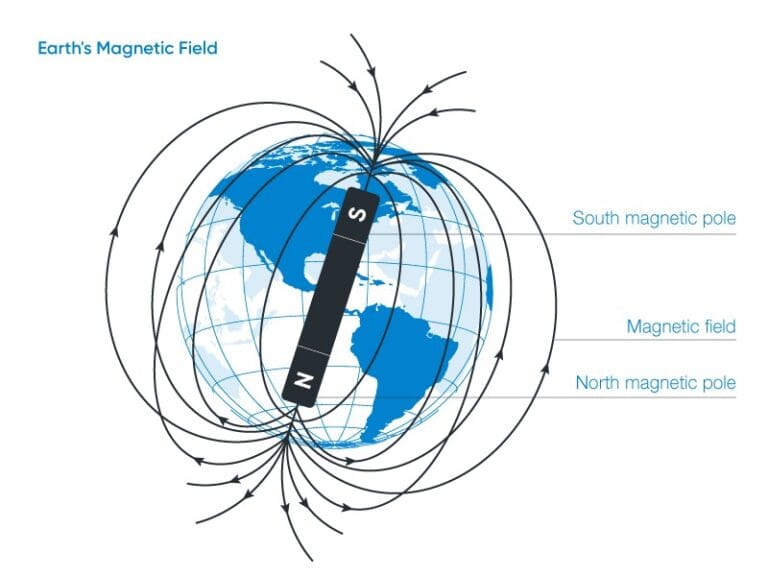
Manyetometre – Uzun Vadeli Yön Düzeltmesi için Mutlak Yön Belirleme
Manyetometre , yön tahmini için gerekli olan Dünya'nın manyetik alanına istikrarlı bir referans sağlayarak jiroskopik algılamayı tamamlar . Sapmayı düzeltmeye yardımcı olur ve özellikle iç mekanlarda veya GPS sinyalinin zayıf olduğu ortamlarda yönsel farkındalık
Başlıca Parametreler:
| Sensör | Parametre | Tanım |
|---|---|---|
| Manyetometre | Manyetik alan aralığı | Geniş bir çalışma ortamını kapsar |
| Çözünürlük | Yön değişikliklerini doğru bir şekilde algılar | |
| Gürültü özellikleri | Tutarlı yönlendirme düzeltmesini destekler |
Barometre – 3D Navigasyon için Dikey Farkındalık
Barometrik basınç sensörü, 10 eksenli MEMS IMU sağlayarak yükseklik tahminine dönüştürür . Bu özellik, GNSS yükseklik verilerinin mevcut olmayabileceği iç mekan İHA'ları, VTOL platformları ve akıllı robotik sistemler için çok önemlidir.
Başlıca Parametreler:
| Sensör | Parametre | Tanım |
|---|---|---|
| Barometre | Basınç aralığı | Geniş irtifa operasyonel senaryolarına olanak sağlar |
| Çözünürlük | Yükseklikteki küçük değişiklikleri algılar | |
| Ölçüm kararlılığı | Z ekseni konumlandırmasının tutarlı olmasını sağlar |
10 Eksenli IMU'lar Gerçek Dünya Uygulamalarında Neden Fark Yaratıyor?
3 eksenli veya 6 eksenli IMU'lar temel hareket ve yönelimi yakalayabilse de, karmaşık ve GNSS'nin zor olduğu ortamlarda 10 eksenli bir , jiroskop, ivmeölçer, manyetometre ve barometre sensörlerini entegre ederek hem hareket hem de çevre hakkında daha kapsamlı bir anlayış sunar.
Bu daha zengin veriler şunları sağlar:
- Manyetik alan algılama yoluyla mutlak yön düzeltmesi
- Hava basıncı ölçümü yoluyla dikey konum algılama
- GPS sinyalinin olmadığı veya kapalı alanlardaki koşullarda iyileştirilmiş konum belirleme.
- Sürüklenmeye, titreşime ve sistem gürültüsüne karşı daha yüksek dayanıklılık
Bağımsız olarak düşünme, tepki verme ve yönlendirme yapması gereken platformlar için 10 eksenli algılama, standart IMU'ların kapsayamadığı ek boyutlar sunar.
10 Eksenli IMU'ya Gerçekten İhtiyacınız Olup Olmadığını Nasıl Anlarsınız?
Her proje tam 10 eksenli bir IMU gerektirmez; ancak uygulamanız GPS'in bulunmadığı ortamları, dikey hareketliliği veya uzun süreli yön stabilitesini içeriyorsa, 10 eksenli bir sistem şart olabilir.
Aşağıdaki durumlarda 10 eksenli bir MEMS IMU seçmeyi düşünmelisiniz:
- Mutlak yön bilgisine ihtiyacınız var (sadece göreceli dönüş değil)
- Platformunuz iç mekanlarda, yer altında veya GNSS sinyalinin zayıf olduğu alanlarda çalışmalıdır
- Rakım tahmini veya çok katlı navigasyon sistemine ihtiyacınız var
- Sisteminiz yalnızca jiroskop ve ivmeölçer kullanarak zamanla sapma gösterir
- Tek bir sensör modülünden gerçek 3 boyutlu uzamsal farkındalık sağlamak istiyorsunuz
Yukarıdakilerden herhangi biri geçerliyse, 6 eksenli sistemden 10 eksenli sisteme geçmek aşırı mühendislik değil, görev güvencesidir.

10 Eksenli IMU'lar En Sık Nerede Kullanılır?
10 eksenli IMU'lar sadece özel sistemler için değil; hareket, yönelim ve çevresel farkındalığın birlikte çalışması gereken birçok modern platformda vazgeçilmez hale geldiler. Peki, en sık hangi uygulamalarda kullanılıyorlar?
1. İnsansız Hava Araçları (İHA'lar)
10 eksenli bir IMU, İHA'ların barometrik verilerle irtifayı korumasına, manyetometre kullanarak yön sapmasını düzeltmesine ve GNSS kesintilerinde veya yoğun hava sahasında kontrolü sürdürmesine olanak tanır. Bu, otonom uçuş, VTOL stabilizasyonu ve bozulmuş navigasyon koşullarında güvenli eve dönüş özellikleri için çok önemlidir.
2. Yer Robotları ve İnsansız Kara Araçları
Tünellerde, bodrumlarda veya GPS sinyalinin olmadığı tesislerde, insansız kara araçları (UGV'ler) yön bulmak için atalet sistemlerine güvenir. 10 eksenli bir IMU ile robotlar dikey farkındalık ve yön düzeltmesi kazanır; bu da haritalama altyapısının olmadığı durumlarda bile katlarda, rampalarda veya karmaşık dönüşlerde daha yüksek konum doğruluğuyla hareket etmelerini sağlar.
3. Hassas Güdümlü Sistemler ve Mühimmat
Akıllı mühimmat gibi kompakt, yüksek darbe dayanımlı uygulamalar, 10 eksenli tam geri bildirimden faydalanır: yönlendirme için jiroskoplar, ivme için ivmeölçerler, rota düzeltmesi için manyetometreler ve yükseklik profillemesi için barometreler. Bu, GNSS kaybı veya karşı önlemler karşısında hassas hedefleme, uyarlanabilir kontrol ve istikrarlı yönlendirme sağlar.
4. Gimballar ve Optik Yükler
Sabit optik sistemlerde, IMU kayması zamanla hedefleme doğruluğunu düşürebilir. 10 eksenli IMU'lar, azimut düzeltmesi için manyetometreler ve eğim/yükseklik referansı için barometreler kullanır; bu sayede kameralar veya sensörler, dengesiz veya hareketli platformlarda bile piksel düzeyinde hassasiyetle hedefe kilitlenir.
5. İç Mekan Navigasyonu ve Akıllı Hareketlilik
Teslimat robotlarında, artırılmış gerçeklik (AR) başlıklarında veya giyilebilir takip cihazlarında olsun, 10 eksenli IMU'lar iç mekanlarda tam yönlendirme ve 3 boyutlu hareket takibini destekler. Barometreler katlar arasındaki yükseklik değişikliklerini algılarken, manyetometreler çelik çerçeveli ortamlarda yönlendirme ipuçları sağlar; bu da işaretçilere veya GNSS'ye ihtiyaç duymadan iç mekan navigasyonunu daha hassas ve güvenilir hale getirir.
GuideNav'ın 10 Eksenli IMU'su: Entegrasyon İçin Tasarlandı
GuideNav'da, 10 eksenli MEMS IMU'larımız, taktiksel sınıf 6 eksenli bir çekirdeği entegre manyetometre ve barometre ile birleştirerek, GNSS'nin bulunmadığı dinamik ortamlarda tam durum algılama olanağı sunar. Her bir ünite, sıcaklık aralığında kalibre edilir ve yalnızca laboratuvar testleri için değil, gerçek dünya uygulamaları için de hizalanır.
Platform gereksinimlerinize uyacak şekilde, çıktı filtreleme, bant genişliği ayarlama, arayüz uyarlaması veya yapısal düzenlemeler gibi kapsamlı özelleştirmeleri destekliyoruz.
Bizi diğerlerinden ayıran sadece sensör özellikleri değil, çalışma şeklimizdir:
- Prototip aşamasından devreye alma aşamasına kadar mühendislik desteği
- Platformunuza özel olarak tasarlanmış, özelleştirilebilir arayüzler ve bağlantı noktaları
- Yaşam döngüsü sürekliliği ile istikrarlı üretim
- İhracata uygun, ITAR'dan muaf bulunabilirlik
Sisteminiz güvenilir yönlendirme ve yükseklik algılamasına bağlıysa, 10 eksenli IMU'larımız entegrasyon için hazırdır.