Hiç bir navigasyon sistemini entegre etmeyi denedim, sadece bunun hiç pozisyon vermediğini fark ettiniz mi?
Bu, insanlar bir IMU'yu bir Ins ile karıştırdığında olur. Kulağa teknik geliyor, ancak sonuçları gerçek: yanlış donanım seçimleri, boşa harcanan bütçe ve beklendiği gibi çalışmayan sistemler. Düzeltme? IMU, INS ve her birinin gerçekte ne yapmak için tasarlandığı arasındaki temel farklılıkları anlamak. Bu kılavuz sizi düz İngilizce olarak geçirecek.
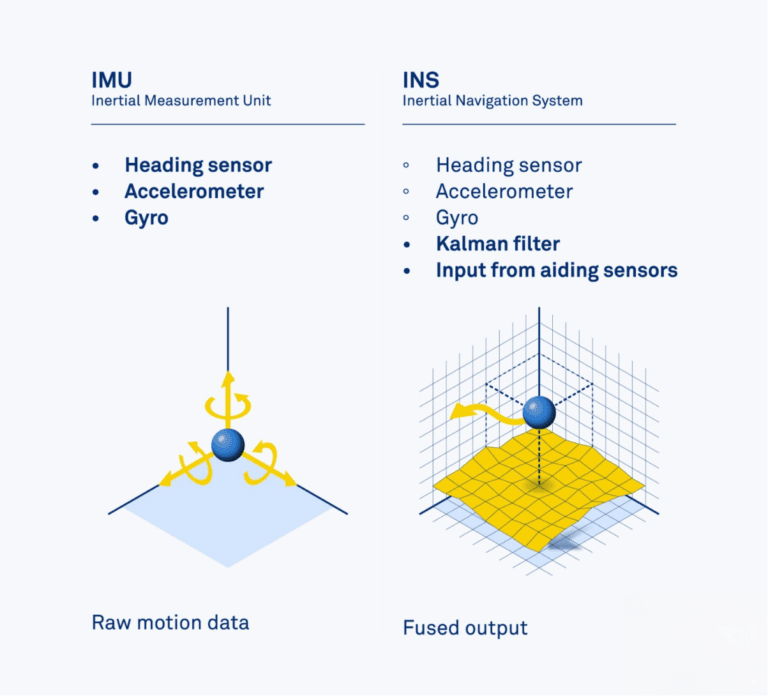
Bir IMU hareketi ölçer, INS IMU verilerini zaman içinde konum ve yönlendirmeyi hesaplamak için kullanır - IMU bir sensördür, INS bir sistemdir.
Karışıklığı temizleyelim - adım adım adım.
İçindekiler

IMU nedir?
bir ölçüm ünitesi (IMU), ivme ve açısal hızı ölçen bir sensör cihazıdır . Tipik olarak MEMS, Sis veya HRG teknolojileri ile inşa edilen bir IMU, ivmeölçerler, jiroskoplar ve bazen manyetometreler . Uzaydaki hareketi tahmin etmek için kullanılan çiğ atalet verilerini çıkarır. IMU'lar İHA'larda, robotlarda, araçlarda ve akıllı telefonlarda yaygın olarak kullanılmaktadır. Bununla birlikte, kendi başlarına, ek işlemlerle entegre edilmedikçe pozisyon veya yönlendirme sağlamazlar IMU'lar, düşük maliyetli ticari sınıftan Guidenav'ın GMS400'ü gibi taktik ve navigasyon sınıfı sensörlerine kadar hassasiyetle değişir.

Ins nedir?
Ataletsel navigasyon sistemi (INS), konum, hızı ve tutumu gerçek zamanlı olarak hesaplamak için IMU verilerini kullanan eksiksiz bir sistemdir Genellikle şunları içerir:
- Gömülü bir imu
- Güçlü bir yerleşik işlemci
- Sensör füzyon algoritmaları (örn. Kalman filtresi )
- Genellikle, yardım için bir GNSS modülü
INS, sürekli bir navigasyon çözümü sağlamak için IMU çıkışlarının gerçek zamanlı entegrasyonunu gerçekleştirir. Bu nedenle, GNSS'nin dengeli ortamlarında bile sınırlı bir süre için çalışabilir, bu da havacılık, denizcilik ve özerk görevlerde . GuiTenav'ın GFS120 ve Guide2D gibi sistemler bu tür entegrasyonu örneklendirir.
IMUS ve INS'ler nasıl farklı?
Çoğu insan bunu basitleştirir: “Ins, sadece GNSS modülüne sahip bir IMU'dur.” Teknik olarak, bu bir başlangıç - ama tüm resimden uzak.
Evet, bir INS özünde bir IMU içerir. Ancak bir işlemciyi, GNSS'yi (genellikle RTK veya SBAS desteği ile) ve bazen tekerlek kodlayıcıları, hava hızı sensörleri, barometrik altimetreler veya Doppler hız günlükleri (DVL) . Bu eklemeler, INS'nin verileri gerçek zamanlı olarak sigorta etmesine izin vererek sadece hareket değil, aynı zamanda konum, hız ve yönlendirme tahminleri.
Bir IMU'yu termometre olarak düşünün - size ham verileri anlatır. INS, hava durumu raporudur: filtrelenmiş, kaynaşmış ve hareket etmeye hazırdır.
| Özellik | IMU | Kâr |
|---|---|---|
| Çekirdek işlev | Hızlanma ve rotasyonu ölçer | Tam pozisyonu, hızı, oryantasyonu hesaplar |
| Bileşenler | İvmeölçer, jiroskop | IMU + GNSS + İşlemci + İsteğe Bağlı Sensörler |
| Çıktı | Ham hareket verileri | Kaynaşmış navigasyon verileri (gerçek zamanlı) |
| GNSS Desteği | Hiçbiri | Yerleşik (RTK/SBAS isteğe bağlı) |
| Dış yardım | Uygulanamaz | Okul, DVL, Airspeed, Altimetre, vb. |
Sadece bir IMU ile gezinebilir misin?
Gözleriniz kapalıyken hareket gibi bir hareket gibi bir IMU düşünün. İlerlediğinizi veya döndüğünüzü söyleyebilirsiniz - ancak nerede olduğunuz hakkında hiçbir fikriniz yok. Sadece bir IMU kullanarak gezinmeye çalıştığınızda olan budur.
Elbette, pozisyonu tahmin etmek için zamanla ivmeyi entegre edebilirsiniz. Ancak küçük hatalar hızla birikir ve saniyeler içinde büyük hatalara dönüşür. Buna Drift denir ve navigasyon için bağımsız IMUS'a güvenilmez hale getirir.
Kısa süreli stabilizasyon için harikalar-gimbal seviyesi tutmak gibi-ancak nerede olduğunuzu veya nereye gittiğinizi bulmak için değil. Bunun için bir ins'e ihtiyacınız var.
Bir INS IMU verilerini nasıl işler?
Sadece hareketi algılayan bir IMU'nun aksine, bir INS bu hareketi yorumlar ve onu tam navigasyon içgörüsüne dönüştürür. Bu, nerede olduğunuzu, ne kadar hızlı hareket ettiğinizi ve hangi yöne baktığınızı bilmek de dahildir. Ancak otomatik olarak gerçekleşmez. Ham sinyalleri güvenilir navigasyona dönüştürmek için dikkatle tasarlanmış bir adım (fizik, matematik ve gerçek zamanlı düzeltme) zinciri gerektirir.
Süreçte yürüyelim:
1. duyu hareketi (IMU girişi)
Her şey sürekli olarak ivme (ivmeölçerler yoluyla) ve açısal oranı (jiroskoplar yoluyla) ölçen IMU ile başlar. Bu değerler sistemin 3D boşlukta nasıl hareket ettiğini yansıtır.
➡ Bu adım, INS'ye ham hareket farkındalığını verir.
2. Hız ve konumu hesaplayın
INS, hız elde etmek için ivmeyi entegre eder, daha sonra hızı zaman içinde tahmin pozisyonu için entegre eder. Bu, sisteme başlangıç noktasından ne kadar ilerlediğini anlatıyor.
➡ INS, hareketi bu şekilde izler - GPS olmadan bile.
3. Tahmin Oryantasyonu
Gyroskop verilerini işleyerek ve yerçekimi ve Dünya'nın manyetik alanı gibi vektörleri referans alarak, INS rulo, perde ve sapma belirler - tam 3D oryantasyonunuz.
➡ Bu adım, sistemin nasıl döndürüldüğünü veya eğildiğini anlamasına yardımcı olur.
4. Doğruluk için sensör füzyonunu uygulayın
IMU verileri tek başına zamanla sürüklenir. INS, IMU girişini diğer sensörlerle birleştirmek için Kalman filtreleri gibi akıllı algoritmalar kullanır:
- GNSS / RTK / SBA'lar
- Tekerlek kokusu
- DVL veya hava hızı sensörleri
- Barometrik altimetreler
Bu düzeltmeler doğruluğu ve uzun vadeli stabiliteyi önemli ölçüde iyileştirir.
➡ Füzyon, bazı sensörler sinyali kaybetse bile sistemi güvenilir tutar.
5. Gerçek zamanlı navigasyon çıkışı sağlayın
Son çıktı, saniyede birçok kez yeniden beslenen ve uçuş kontrolörleri, otopilotlar veya haritalama sistemleri tarafından kullanıma hazır olan sürekli, gerçek zamanlı bir konum, hız ve tutum verisi akışıdır.
➡ INS'yi tam bir navigasyon çözümü yapan budur.
Guideenav'ın INS ürünleri, GNSS'nin dengeli koşulları, dinamik ortamları ve yüksek titreşim olan platformları için ayarlanmış füzyon motorları ile bu mimariyi takip ediyor. Sonuç: En önemli olduğunda güvenebileceğiniz güvenilir navigasyon.
Uygulamanız için bir IMU ne zaman yeterlidir?
Sisteminizin sadece hareketi algılaması , konumu hesaplamaması veya zaman içinde başlığı hesaplamaması durumunda ihtiyacınız olan tek şey bir IMU'dur. Harekete tepki verirken, mutlak konumu izlemeye çalışmadığınızda idealdir.
Ortak kullanım durumları şunları içerir:
Kamera stabilizasyonu
Motorların kamerayı sabit tutmasına yardımcı olmak için titreşimi veya eğimi tespit eder.
Jest izleme
Hareketi takip ettiğiniz AR/VR veya giyilebilir cihazlarda kesin pozisyon değil.
Kısa vadeli yönelim
Başlangıç, gezinme veya hızlı manevralar sırasında dron veya robotlarda kullanılır.
Uçuş Kontrol Desteği
GNSS veya optik akışla eşleştirilen IMUS, drone stabilizasyonu için hızlı geri bildirim sağlar.
Unutmayın: IMUS sadece ham ivme ve rotasyon verin. Oryantasyona veya hıza ihtiyacınız varsa, matematiği kendiniz inşa etmeniz gerekir - fileler, sürüklenme düzeltmesi ve daha fazlası.
Bu, sisteminizin kapasitesindeyse, IMU hafif, uygun fiyatlı ve verimli çözümdür.
Gerçekten ne zaman tam bir ins'e ihtiyacınız var?
Sisteminizin her zaman kesin konumu ve yönlendirmeyi , özellikle GNSS'nin başarısız olabileceği veya mevcut olmadığı ortamlarda tam bir INS'ye ihtiyacınız vardır.
Tipik kullanım durumları şunları içerir:
- GNSS-DEDENED ortamları: tüneller, iç mekan, sualtı veya kentsel kanyonlar gibi
- Yüksek dinamik platformlar: Hızlı, doğru güncellemelere ihtiyaç duyan dronlar, füzeler ve arazi araçları gibi
- Ölü hesaplama: Sistemin GNSS sinyalleri arasında veya GNSS olmadan navigasyonu sürdürmesi gerektiği
- Hassas-Kritik Görevler: Haritalama, Hedefleme veya Otonom Sürüş gibi
Bu durumlarda, tek başına bir IMU hızlı bir şekilde sürüklenir ve güvenilir olmayan sonuçlara yol açar. Bir INS, Atalet verilerini GNS'ler ve DVL, Odometers veya Altimeters gibi isteğe bağlı sensörlerle kaynaştırarak bunu çözer.
IMU veya INS'yi seçmede yaygın hatalar nelerdir?
Dürüst olalım - atalet sensörlerine geldiğinde, özellikle sahada yeniyseniz yanlış çağrı yapmak kolaydır. Takımların yanlış aracı sayabildiğimden daha fazla kez seçtiğini gördüm. Ve nadiren teknoloji ile ilgili - sorunu yanlış anlamakla ilgili.

İşte işler genellikle yoldan çıkıyor:
Hata #1: Bir IMU düşünmek size pozisyon verir
Değil. Bir IMU size sadece ne kadar hızlı hareket ettiğinizi veya döndüğünüzü söyler. Eğer kutudan çıkmış gerçek zamanlı koordinatlar umuyorsanız-hayal kırıklığına uğrayacaksınız.
Hata #2: Zorlu bir iş için giriş seviyesi bir IMU kullanmak
Düşük maliyetli bir sensör kağıt üzerinde iyi görünebilir, ancak hızlı hareket eden bir drone veya robota bağladıktan sonra, gürültü ve sürüklenme verilerinizi mahveder.
Hata #3: Bir IMU'nun hile yapacağında bir ins için ödeme yapmak
İhtiyacınız olan tek şey bir kamerayı stabilize etmek veya temel oryantasyonu tespit etmekse, tam bir INS aşırıya kaçmaktır. 3000 dolarlık bir çözümle 300 dolarlık bir sorunu çözmeyin.
Hata #4: Gerçek dünya ortamını unutmak
Laboratuvar özellikleri her zaman saha performansını yansıtmaz. Yüksek titreşim, aşırı sıcaklıklar veya şok yükleri ucuz sensörleri hızlı atabilir.
Hata #5: Entegrasyon çabalarını hafife almak
RAW IMU verileri tak ve oynatmaz. Doğru yazılım, filtreler veya algoritmalara sahip değilseniz, en iyi sensör bile aşağı verecektir.
GuiTenav IMU/INS seçimi için hangi destek sunuyor?
GuiTenav'da sadece gemi sensörleri değil, doğru sistemi oluşturmanıza . Sunuyoruz:
- Bire Bir Uygulama Danışmanlığı
- IMU/INS Performans Eşleşmesi
- İHA, UGV ve Denizcilik Sistemleri için Entegrasyon Kılavuzları
- Veri sayfası erişim ve değerlendirme kitleri
- Hızlı Yanıt Mühendisliği Desteği
İster düşük güçlü bir İHA ister GNSS ile dengeli bir navigasyon sistemi inşa ediyor olun, görev profilinize göre MEMS IMU, Sis IMU veya tam INS