İçindekiler
- IMU ne?
- Bir IMU'nun temel bileşenleri nelerdir?
- IMU'nun ortak uygulamaları nelerdir?
- Navigasyon ve konumlandırma sistemlerinde IMU neden önemlidir.
- MEMS IMU : MEMS IMU ve uygulamalarına genel bakış.
- Sis IMU : Fiber optik jiroskop IMU-Yüksek hassasiyetli uygulamalarda kullanma durumları
- Mems ve Sis jiroskopları - kısa bir karşılaştırma
- Önyargı dengesizliği
- İlk önyargı
- Menzil ve çözünürlük
- Ölçek faktörü ve ölçek hatası
- Gürültü ve gürültü yoğunluğu
- Bant genişliği ve örnek hızı
- Rastgele yürüyüş
- Dikkate alınması gereken faktörler (performans özellikleri, çevre, boyut, maliyet).
- Uygulamanızın gereksinimlerini anlamak (örn., Endüstriyel, Tüketici Elektroniği, Otomotiv).
- IMU seçerken kaçınılması gereken yaygın hatalar.
giriiş
Ataletsel ölçüm birimleri (IMU'lar) modern navigasyon sistemlerinin belkemiğidir. Uçak, füzeler, kendi kendine giden arabalarda, hatta akıllı telefonunuzda olsun, bu sensörler GPS gibi harici referanslara ihtiyaç duymadan hareket ve oryantasyonu ölçmede çok önemli bir rol oynar. Son yirmi yılda, MEMS teknolojisinin gelişimi büyüklüklerini ve maliyetlerini büyük ölçüde azalttı ve onları çok çeşitli endüstrilerde vazgeçilmez hale getirdi.
Bu kapsamlı kılavuzda, IMUS'un temelleri boyunca, nasıl işlev gördükleri, kullandıkları farklı sensör türleri ve performans metriklerinin neden önemli olduğunu da içeren size yol göstereceğim. En son havacılık yeniliklerinden tüketici elektroniğine, IMU'nun ne olduğunu, IMUS çalışmasının yüksek teknoloji sistemlerini tasarlamaya veya optimize etme konusunda yer alan herkes için nasıl kritik olduğunu anlamak. Bu makalenin sonunda, projeniz için doğru IMU'yu seçme bilgisiyle iyi donanımlı olacaksınız ve en zorlu gereksinimleri bile karşılayabilmenizi sağlayacaksınız.
Ataletsel ölçüm birimi nedir (imu)/IMU nedir?
Ataletsel bir ölçüm ünitesi (IMU), bir nesnenin uzaydaki yönünü ve hareketini belirlemek için ivme, açısal hız ve genellikle manyetik alanları ölçen bir sensör sistemidir. Tipik olarak ivmeölçerler, jiroskoplar ve bazen manyetometreler içerir. Bu bileşenler, havacılık ve robotiklerden akıllı telefonlara ve otonom araçlara kadar çok çeşitli uygulamalarda navigasyon, stabilizasyon ve kontrol için önemli veriler sağlamak için birlikte çalışır. IMU'lar, hassas hareket ve oryantasyon verilerinin gerekli olduğu sistemlerde gereklidir.
Imus dünyasını ayrıntılı olarak keşfedelim.
IMU sensörü verileri nedir?
IMU sensörü verileri üç birincil sensörün sinyallerinden oluşur:
- Hızlandırıcılar : X, Y ve Z eksenleri boyunca doğrusal ivmeyi ölçün.
- Jiroskoplar : Aynı eksenlerin etrafındaki dönme hızı veya açısal hızı ölçün.
- Manyetometreler (isteğe bağlı): Pusula benzeri bir işlevsellik sunarak uzaydaki oryantasyona yardımcı olacak manyetik alanı ölçün.
Bu IMU sensörlerinin her biri, birleştirildiğinde ve işlendiğinde bir nesnenin hareketinin ve yönünün tam bir resmini veren bir IMU veri akışı sağlar. Tipik olarak, bu veriler aşağıdakiler gibi önemli metrikleri elde etmek için kullanılır:
- Hızlanma : Hızda doğrusal değişiklik.
- Açısal hız : bir eksen etrafında dönüş hızı.
- Oryantasyon : Bir nesnenin 3D boşlukta dönme konumu.
IMU sensörü verilerinin hassasiyeti ve doğruluğu, gerçek zamanlı izleme ve navigasyon gerektiren sistemlerde çok önemli bir rol oynar. Havacılık, savunma veya endüstriyel uygulamalarda kullanıldığında, veriler bir uzay aracı, uçak veya robotik sisteme kesin doğrulukla rehberlik edebilir.
Bir IMU'nun temel bileşenleri nelerdir? /IMU sensörü nedir?
Ataletsel bir ölçüm ünitesi (IMU) hakkında konuştuğumuzda , her biri hareket ve oryantasyonun ölçülmesinde kritik bir işlev sağlayan birkaç çekirdek sensörün bir kombinasyonuna atıfta bulunuyoruz. Birincil IMU sensörleri arasında ivmeölçerler , jiroskoplar ve birçok durumda manyetometreler . Bu sensörler bize bir nesnenin uzaydaki hareketini kapsamlı bir şekilde anlamak için birlikte çalışır. Bu sensörlerin her birinin IMU'nun genel işlevselliğine nasıl katkıda bulunduğunu bozalım.
IMU'nun temel işlevi basittir: bir nesnenin ne kadar hızlı hareket ettiğini (doğrusal ivme) ve nasıl döndüğünü (açısal hız) ölçer. Bu veriler daha sonra zaman içinde pozisyon, hızı ve oryantasyonu hesaplamak için kullanılır. Bunu makineler için iç “denge duygusu” olarak düşünün. İster havada bir drone rehberlik ediyor, ister otonom bir arabanın gezinmesine yardımcı oluyor veya bir akıllı telefon ekranını stabilize ediyor olsun, IMU, sistemlerin her zaman hareketlerinden haberdar olmasını sağlar.
IMU ivmeölçer: Bir ivmeölçer neyi ölçer?
İvmeölçer fazla eksen boyunca doğrusal ivmeyi ölçer. Basit bir ifadeyle, bir şeyin ne kadar hızlı hızlandığını veya yavaşladığını söyler. Bu, zaman içinde hız ve pozisyondaki değişiklikleri hesaplamak için gereklidir. Örneğin, bir arabada, ivmeölçer, araba hızlandıkça, yavaşlar veya keskin dönüşler yaptıkça kuvvetleri ölçecektir.
Deneyimlerime göre, ivmeölçerler çoğu sistemde hareket izlemenin belkemiğidir. İster İHA'larla (insansız hava araçları), akıllı telefonlarla veya endüstriyel ekipmanlarla çalışıyor olun, ivmeölçerler hareketin hesaplanması için gerekli temel verileri sağlar.
IMU Gyroscope: Bir jiroskop neyi ölçer?
IMU'nun jiroskopu açısal hızı ölçer - bir nesnenin eksenlerinin etrafında ne kadar hızlı döndüğü. Daha önce bir masada bir üst eğirme gördüyseniz, bu dönüş tam olarak bir jiroskop algıladığı şeydir. Bu sensör, özellikle sistemleri dengelemede veya bir nesnenin tam dönme hareketini izlemede yararlı olan bir cihazın yönünü belirlememize yardımcı olur.
Jiroskopların navigasyon sistemlerinde, özellikle havacılık uygulamalarında hayati bir rol oynadığını gördüm. Doğruluk anahtar olduğunda, yüksek kaliteli bir jiroskop, türbülans gibi dış faktörler oyuna girse bile, oryantasyonun hassasiyetle izlenmesini sağlar.
IMU Manyetometresi: Bir manyetometre ne ölçer?
Son olarak, manyetometre , tipik olarak Dünya'nın manyetik alanına göre başlığı veya yönü belirlemek için kullanılan cihaz çevresindeki manyetik alanı ölçer. Bunu elektronik bir pusula olarak düşünün. Jiroskoplar ve ivmeölçerler hareketi izlemeye yardımcı olurken, bir manyetometre manyetik kuzeye göre başlık bilgileri sağlayarak yönelim doğruluğunu arttırır.
GPS sinyallerinin zayıf veya kullanılamadığı uygulamalarda manyetometrenin özellikle önemli olduğunu buldum. Örneğin, yoğun kentsel ortamlarda, yeraltında veya sualtı, doğru bir yön duygusuna sahip olmak çok önemlidir ve manyetometre asla “kaybolmanızı” sağlar.
IMU'nun ortak uygulamaları nelerdir?
IMU'lar sadece belirli bir alanla sınırlı değil, geniş bir endüstri yelpazesinde kullanılırlar. Çok yönlülüğü, modern teknolojiye bu kadar ayrılmaz hale gelmelerinin temel nedenlerinden biridir. havacılık ve otomotivden tüketici elektroniklerine , robotiklere ve savunma/askere kadar her şeyde istihdam edildiğini gördüm . İşte her sektörü nasıl etkiliyorlar:
Savunma/askeri
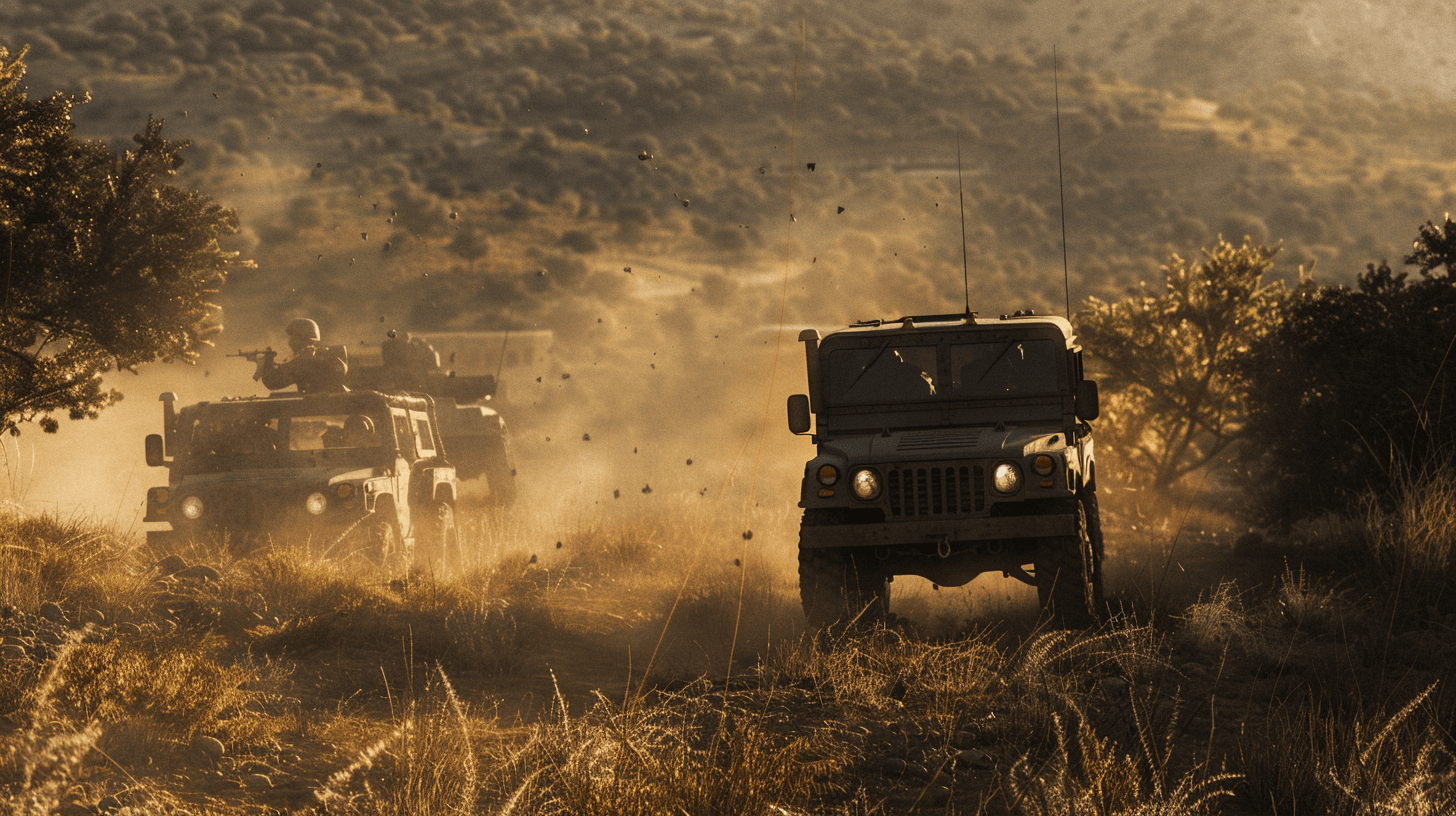
Bu, IMUS'un değerlerini gerçekten kanıtladığı bir endüstridir. Savunma ve askeri uygulamalarda, kesin navigasyon ve istikrar ihtiyacı pazarlık edilemez. Füze rehberlik sistemlerinden insansız hava araçlarına (İHA) ve hatta asker giyilen cihazlara IMUS, operasyonların doğru ve etkili bir şekilde ilerlemesini sağlamada önemli bir rol oynamaktadır.
Savunma ile ilgili çeşitli projelere katıldım ve size ilk elden IMUS'un başarısızlığın bir seçenek olmadığı ortamlarda kritik olduğunu söyleyebilirim. Örneğin, füze sistemlerinde IMU, hız ve rotasyon hakkında gerçek zamanlı geri bildirim sağlar ve füzenin hedefine hassasiyetle vurmasını sağlar. GPS sinyallerinin güvenilmez veya sıkışabileceği İHA'larda IMUS, zanaatı kurs olarak tutmak için gerekli atalet navigasyonunu sağlar.
Asker düzeyinde bile, IMU'lar GPS yokluğunda hareket ve yeri izlemek için taktik cihazlara gömülür ve yoğun kentsel ortamlar veya yeraltı gibi karmaşık arazilerde durumsal farkındalık sağlamaya yardımcı olur. IMU'lar, modern savaşın otonom ve yarı özerk sistemlere artan bağımlılığının önemli bir kolaylaştırıcısıdır.
Havacılık

Havacılık ve uzayda IMUS'un önemi abartılamaz. Uçak, uzay aracında veya dronlarda olsun, IMUS navigasyon, kontrol ve stabilite için gerekli kritik verileri sağlar. Esasen, düz uçuş yolları ve doğru inişler sağlayan otopilot sistemlerinin omurgasıdır.
Havacılık ve uzay müşterileriyle çalıştığımda, genellikle aşırı ortamlarda çalışabilen yüksek performanslı IMU'lar talep ederler-yüksek irtifalar ve hatta dış mekan düşünürler. IMU, türbülans, rüzgar kesme veya diğer dış kuvvetlere ayarlanan uçakları kursa tutar. Uzay araştırmalarında IMUS, güvenecek GP'lerin bulunmadığı uyduların ve gezginlerin yönünü korumak için gereklidir.
Otomotiv

Otonom araçların yükselişiyle IMUS, otomotiv endüstrisinde zorunlu hale geldi. Kendini süren arabalar, insan girdisi olmadan konumlarını ve hareketlerini anlamak için IMUS'a güvenir. IMU, aracın gerçek zamanlı olarak eleştirel kararlar almasına yardımcı olur - ister ne zaman yavaşlayacağını veya güvenli bir şekilde keskin bir dönüş alacağını tespit ediyor.
Gelişmiş Sürücü Yardım Sistemlerinin (ADAS) geliştirilmesinde IMUS, yerleşik sistemlere veri besleyerek çok önemli bir rol oynar. IMUS'un stabilite kontrolünde kullanıldığını gördüm, burada aşırı aşırı veya alt metin tespit edilmesine ve düzeltmelerine yardımcı oldular ve kazaları önlemek için hızlı yavaşlamanın hayati olduğu otomatik fren sistemlerinde.
Tüketici Elektroniği

Tüketici elektroniğinde, IMU'lar daha ince ama aynı derecede önemli bir varlığa sahiptir. Akıllı telefonunuzdalar, pürüzsüz ekran rotasyonu veya harekete dayalı hareketlere güç sağlıyorlar. Fitness izleyicilerde ve akıllı saatlerde, IMUS izleme hareketi, aktiviteyi izleyin ve yakılan adımları veya kalorileri hesaplayın.
Giyilebilir teknolojiyi içeren çeşitli projelerde, bir IMU'nun kullanıcı deneyimine ne kadar katkıda bulunduğunu ilk elden gördüm. Fitness cihazlarının içindeki sensörler, hareketleri doğru bir şekilde yakalamak, yürümek, koşmak ve hatta yüzmek için ivmeölçerler ve jiroskoplar kullanır. IMUS, bu cihazların sorunsuz çalışmasını sağlayarak kullanıcılara günlük olarak güvendikleri doğru verileri sağlıyor.
Robot
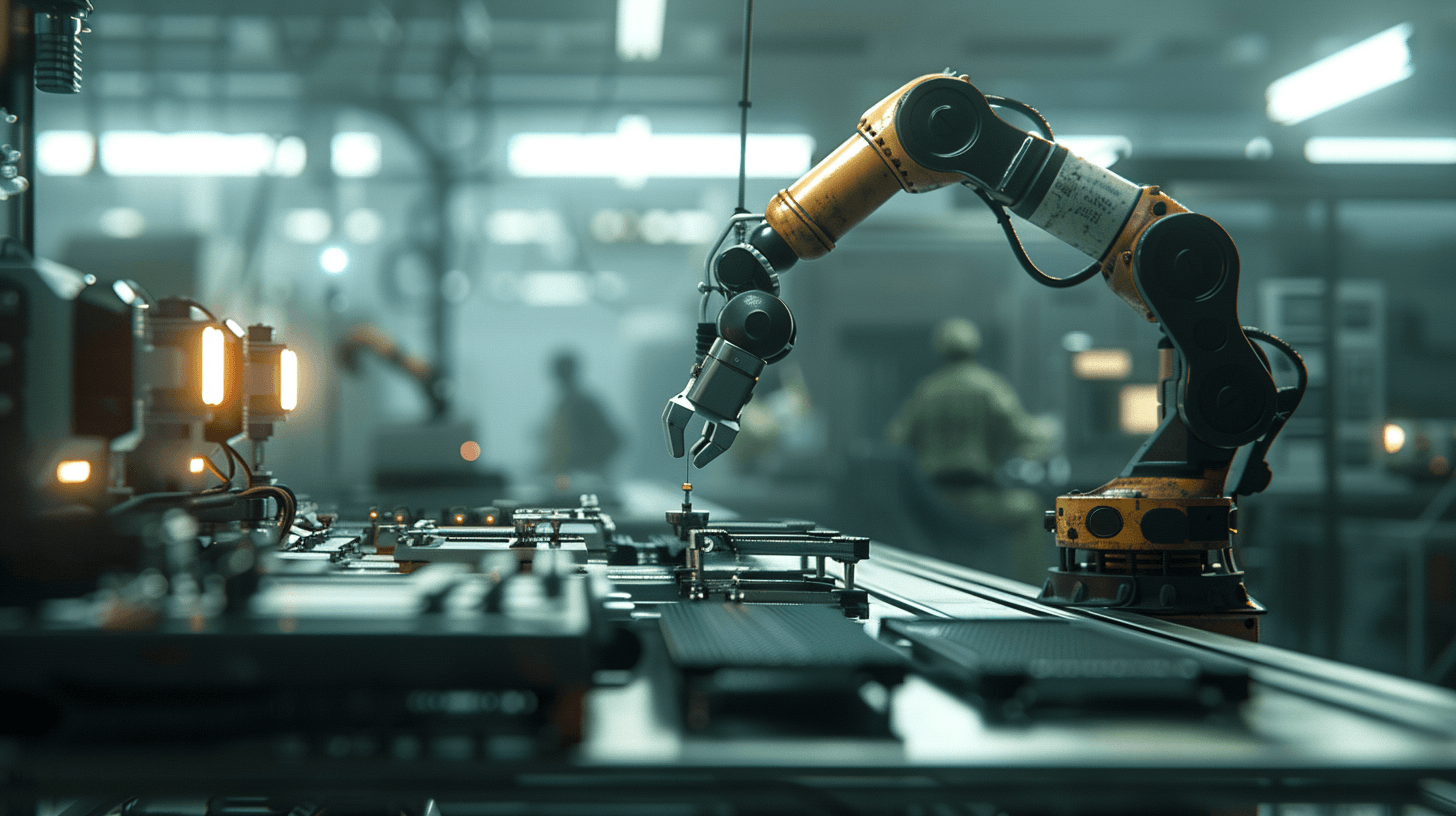
Hem endüstriyel hem de özerk robotlar, hassas navigasyon ve kontrol için büyük ölçüde IMU'lara bağlıdır. Endüstriyel ortamlarda IMUS, robotların montaj hatlarında hassasiyetle hareket etmesine izin vererek hassas parçaları en yüksek doğrulukla kullanır. Otonom robotlar için, ister bir depoda geziniyor ya da felaket bölgelerini keşfediyorlar, IMUS dengeli ve kurs olarak kaldıklarından emin olur.
IMU'ların dengeleme ve hareket için anahtar olduğu birden fazla otonom robotik sistem üzerinde çalıştım. IMU'lar olmadan, bu sistemler düzensiz arazide gezinmek gibi kritik görevler için gereken hassasiyetten yoksun olacak ve onları çok daha az etkili ve güvenilir hale getirecektir.
Navigasyon ve Konumlandırma Sistemlerinde IMU Neden Önemlidir?
Hassas navigasyon veya konumlandırma gerektiren herhangi bir sistemde IMU, vazgeçilmez bir araçtır. Yıllar geçtikçe, IMUS'un İHA'lardan denizaltılara kadar her şeyi doğru yolda tutmada oynadığı önemli rolü gördüm. Faydasının çekirdeği, dış referanslara güvenmeden hareketi ölçme .
GPS ile dengeli ortamlar
, GPS tarafından dengelenmiş ortamlarda işlev görme yeteneğidir . İster derin su altı, yeraltı veya GPS sinyallerinin güvenilmez olduğu yoğun bir kentsel alanda olun, bir IMU hala inanılmaz bir doğrulukla hareketi izleyebilir. IMU sayesinde, hız ve oryantasyondaki değişiklikleri sürekli olarak ölçen bu ortamlarda sorunsuz bir şekilde çalışmaya devam eden sistemler gördüm.
Havacılık ve uzayda, özellikle İHA'lar veya askeri dronlarla, sadece GP'lere dayanmak riskli olabilir. IMUS, GPS sinyalleri kaybolduğunda veya sıkıştığında atalet navigasyonu sunarak ek bir güvenilirlik katmanı sağlar. Bu yedeklilik hem sivil hem de savunma başvuruları için kritik öneme sahiptir.
Konumlandırma ve stabilizasyon
Stabilizasyon, Imus Excel'in olduğu başka bir alandır. Özellikle havacılık ve deniz sektörlerinde birçok sistem, istikrarı korumak için gerçek zamanlı ayarlamalar gerektirir. İster uçuş sırasında bir drone sabit tutuyor, isterse bir kamera gimbalının görüntüleri yakalarken sabit kalmasını sağlıyor olsun, IMUS perde arkasındaki teknolojidir.
Gerçek zamanlı düzeltmelerin gerekli olduğu birçok sistemde IMUS ile çalıştık Örneğin, helikopterlerde veya uçaklarda IMUS, otopilota sürekli olarak geri bildirim sağlayarak, rüzgar gusts veya türbülansı telafi etmek için mikro düzeltmeler yapmanıza yardımcı olur.
Hassasiyet ve özerklik
Kendi kendine giden arabalar veya robotlar gibi özerk sistemlerde, hassas navigasyon ihtiyacı çok önemlidir. IMUS, dış koşullar zor olsa bile, bu sistemlerin yönelimlerini, hızlarını ve yörüngelerini anlamalarına yardımcı olur. Algoritmaları kontrol etmek için verileri besleyerek IMU, bu makinelerin tam olarak nerede olduklarını ve nereye gittiklerini “bilmelerine” izin verir. Bu gerçek zamanlı farkındalık, gerçek özerkliği mümkün kılan şeydir.
Otonom sistemlerle, özellikle İHA'larla yaptığımız çalışmalarda, IMU'ların zaman içinde konumu doğru bir şekilde hesaplamaya nasıl yardımcı olduğunu gördük. Sensör füzyon teknolojileri ile birleştiğinde IMU, bu sistemlerin yollarını ayarlamasını ve insan müdahalesi olmadan onları korumasını sağlar.
IMU neye benziyor?

bir ölçüm ünitesi (IMU) tipik olarak bir nesnenin hızlanmasını, açısal hızını ve bazen manyetik alanları ölçmek için birkaç sensörü entegre eden kompakt bir cihazdır. Bir IMU'nun spesifik görünümü, üreticiye, modele ve amaçlanan kullanıma bağlı olarak değişebilirken, IMU'ların çoğunun paylaştığı bazı genel özellikler vardır.
İşte bir IMU'nun tipik olarak neye benzediğinin bir dökümü:
1. Boyut ve şekil
Çoğu atalet ölçüm ünitesi (IMU) nispeten küçük ve genellikle dikdörtgen veya küboid şekildedir. Boyutlar hassasiyete ve uygulamaya bağlı olarak değişebilir, ancak tüketici elektroniğinde kullanılan genel bir IMU, küçük bir madeni para veya kalın bir kibrit kitabının boyutu olabilir. Endüstriyel veya havacılık IMU'lar, sistemin karmaşıklığına bağlı olarak, bazen küçük bir dizüstü bilgisayar veya sabit disk sürücüsünün boyutu olabilir.
2. Dış konut
IMU'lar genellikle iç sensörleri nem, toz veya darbeler gibi çevresel faktörlerden korumak için sağlam, genellikle kapalı kasalara yerleştirilir. Muhafaza malzemesi tipik olarak metal alaşım veya yüksek mukavemetli plastiktir, bu da sert koşullar için dayanıklılık sağlar (örn. Havacılık, askeri uygulamalar).
- Endüstriyel ve havacılık IMU'lar aşırı koşullara dayanacak daha sağlam, metalik bir kasaya sahip olabilir.
- Tüketici sınıfı IMU'lar (akıllı telefonlar veya dronlar gibi cihazlarda kullanılır) daha hafif, plastik muhafazalarda bulunma eğilimindedir.
3. Konektörler ve bağlantı noktaları
IMU'lar genellikle güç, veri çıkışı ve bazen iletişim arayüzleri için konektörler içerir (örneğin, UART, I2C, SPI veya RS-232). Bu konektörler, IMU'nun bir drone uçuş kontrolörü, bir robot veya uçak navigasyon sistemi olsun, diğer sistemlerle arayüzlemesine izin verir.
- Daha karmaşık sistemler için, birden fazla bağlantı noktası görünebilir.
- Bazı durumlarda, kablosuz IMU'lar kullanılır.
4. Sensör yerleştirme
Bir IMU'nun dahili bileşenleri - hesapometreler, jiroskoplar ve manyetometreler - tipik olarak ünitenin gövdesine gömülüdür. Bir mikroskop altında veya ayrıntılı bir şematikte bir IMU'ya bakacaksanız, cihazın içine gömülü küçük sensör çipleri (MEMS veya piezoelektrik cihazlar) görürsünüz.
IMU'daki sensör türleri
Ataletsel ölçüm birimleri (IMU'lar) söz konusu olduğunda, içindeki sensörler gerçekten performansı yönlendiren şeydir. Yıllar geçtikçe, IMU'larda kullanılan birkaç sensör tipi gördük, ancak MEMS ve Sis teknolojileri endüstrilerdeki geniş uygulamaları nedeniyle öne çıkıyor. Her sensör tipi, kullanıldığı uygulama ve ortama bağlı olarak kendi güçlü ve zayıf yönleriyle birlikte gelir. MEMS IMU'ları hem de Fog IMU'ları parçalayacağım , ardından ikisini performans, maliyet ve güvenilirlik açısından karşılaştıracağım.
MEMS IMU: MEMS IMU ve uygulamalarına genel bakış
Mikro-elektro-mekanik sistemler veya MEMS IMU'lar sensör dünyasında devrim yaratmıştır. ivmeölçerleri , jiroskopları ve bazen manyetometreleri küçük, uygun fiyatlı bir pakette birleştiren oldukça entegre IMU'lara izin verir Bu yüzden MEMS IMU'ları bugün akıllı telefonlardan fitness izleyicilerine kadar neredeyse her tüketici cihazında bulacaksınız. Aslında, o kadar yaygın hale geldiler ki, modern elektronikleri onlarsız hayal etmek zor.
MEMS sensörleri popülerdir, çünkü performans, boyut ve maliyet arasında bir denge kurarlar. Kompakt ve enerji tasarrufu sağlarlar, bu da onları alanın premium olduğu cihazlar için ideal hale getirir. tüketici elektroniği , giyilebilir teknoloji ve otomotiv sistemlerinde kullanıldığı çeşitli projeler üzerinde çalıştım- iyi doğruluğa ihtiyaç duyduğunuz ancak piyasada mevcut olan en yüksek hassasiyete ihtiyaç duymadığınız alanlar.
Ancak, MEMS IMU'larının sınırlamaları vardır. Birçok uygulama için etkili olmalarına rağmen, zamanla sürüklenme eğilimindedirler ve sıcaklık dalgalanmaları gibi çevresel koşullardan etkilenebilirler. Örneğin, otomotiv güvenlik sistemlerinde , MEMS IMU'lar keskin dönüşleri veya ani durakları tespit etmek gibi kısa vadeli görevler için iyi çalışır, ancak uzun süreler boyunca hassasiyetin kritik olduğu havacılık ve uzay gibi daha zorlu ortamlarda mücadele edebilirler. Daha yüksek hassasiyet gerektiğinde Fog IMUS gibi diğer teknolojilere bakmaya başlıyoruz.
Sis IMU: Fiber optik jiroskop IMU-Yüksek hassasiyetli uygulamalarda kullanma durumları
Performans ve hassasiyet açısından MEM'lerin ötesine geçmemiz gerektiğinde, fiber optik jiroskoplar (sis) devreye girer. arızada , savunma ve ölçümdeki en küçük hatanın bile büyük sonuçlara yol açabileceği diğer alanlarda kullanılır Bu sensörler, yüksek doğruluk ve uzun süreli stabilitesi, titreşim veya sıcaklık değişimleri gibi dış kuvvetlerin performansı ciddi şekilde etkileyebileceği ortamlarda çok önemli olan özellikleri ile bilinir.
MEM'lerin aksine, sis imus, açısal hızdaki değişiklikleri tespit etmek için ışığın özelliklerini kullanır. Bir ışık demeti optik lif bobinlerinden geçirilir ve IMU döndüğünde, bu yol değişir, bu da sistemin dönüşü inanılmaz hassasiyetle ölçmesine izin verir. Sis teknolojisinin temel avantajı, hareketli parçaların olmamasıdır. Bu, zamanla yıpranabilen daha az bileşen anlamına gelir, bu yüzden Sis IMU'ları son derece güvenilirdir ve MEMS tabanlı sistemlerden daha uzun süre dayanır.
, füze rehberlik sistemleri , insansız hava araçları (İHA) ve hatta uydu navigasyonu için mükemmeldir . Yüksek hassasiyetli havacılık projeleriyle çalışma deneyimime göre, GPS dengeli ortamlarda veya aşırı koşullar altında kusursuz bir şekilde işlev görebilen bir sisteme ihtiyacımız olduğunda genellikle Fog IMUS'a dönüyoruz. Sis sistemleri için fiyat noktası daha yüksektir, ancak arızanın bir seçenek olmadığı kritik uygulamalar için her kuruşa değer.
Mems ve Sis jiroskopları - kısa bir karşılaştırma
MEM'lerin ve sis jiroskoplarının birbirlerine nasıl yığıldığına bakalım Yıllar boyunca, her iki teknolojiyle de çalışma fırsatım oldu ve her birinin kullanım durumuna bağlı olarak yeri olduğu açık.
- Hassasiyet : Burası sis açıkça parlıyor. Sis jiroskopları, özellikle uzun süreler boyunca çok daha doğrudur. Minimum sürüklenme sergilerler, onları havacılık veya savunma gibi sürekli yüksek hassasiyet gerektiren uygulamalar için ideal hale getirirler. Öte yandan, MEMS jiroskopları iyi bir doğruluk sunar, ancak zamanla sürüklenmeden muzdarip olabilir, bu da yüksek hassasiyetli görevlerde daha sık yeniden kalibrasyona ihtiyaç duydukları anlamına gelir.
- Boyut ve Maliyet : MEMS IMU'lar Sis IMU'larından çok daha kompakt ve uygun maliyetlidir. Bu, onları boyut ve bütçenin kritik faktörler olduğu tüketici elektroniği, otomotiv ve diğer ticari uygulamalar için bariz bir seçim haline getirir. Sis sistemleri, daha pahalı ve daha hantal olsa da, mutlak doğruluk gerektiğinde ve performans tehlikeye giremez.
- Dayanıklılık : Sağlamlık açısından, sis sistemleri, özellikle sert ortamlarda bir kenara sahiptir. Hareketli parçalara sahip olmadıkları için, aşınmaya ve yırtmaya daha az eğilimlidirler, bu da onları kaba koşullarda uzun süreli dağıtımlar için mükemmel hale getirir. MEM'ler, mekanik bileşenleri ile, çoğu tüketici ve endüstriyel uygulamada yeterince dayanıklıdır, ancak aşırı koşullar altında daha hızlı bozulma eğilimindedir.
- Güç tüketimi : MEMS IMU'lar daha fazla güç tasarrufu sağlar, bu yüzden genellikle akıllı telefonlar ve fitness izleyicileri gibi taşınabilir elektroniklerde bulunurlar. Sis IMUS, kullandıkları optik sistemler nedeniyle daha fazla güç tüketir, bu da onları düşük güç uygulamaları için daha az uygun hale getirir, ancak gücün sınırlı olmadığı havacılık veya savunma gibi alanlarda mükemmel kabul edilebilir.
IMU Performans Özellikleri Açıklandı
Herhangi bir uygulama için doğru Atalet Ölçüm Birimi'ni (IMU) seçme söz konusu olduğunda, performans özelliklerini anlamak çok önemlidir. Bu spesifikasyonlar, IMU'nun gerçek dünya koşullarında ne kadar iyi performans göstereceğini, özellikle de doğruluk ve stabilite temel gereksinimler olduğunda belirler. Yıllar boyunca, önyargı dengesizliği veya gürültü yoğunluğu gibi bazı performans faktörlerinin, özellikle havacılık, savunma ve yüksek hassasiyetli robotik gibi alanlarda bir projeyi nasıl yapabileceğini veya kırabileceğini ilk elden gördük. Dikkatli bir şekilde değerlendirilmesi gereken bazı temel özelliklerden geçelim.
1. önyargı kararsızlığı
yüksek hassasiyetli uygulamalarda önemli bir etkisi olan faktörlerden biridir . Esasen, önyargı dengesizliği, sıfır okuması gerektiğinde sensörün çıkışındaki küçük, rastgele varyasyonları ifade eder. Basit bir ifadeyle, sabit olduğunda IMU'nun “sürüklenmesi”.
Pratik uygulamalarda, önyargı dengesizliği önemlidir, çünkü sistemin zaman içinde doğruluğu ne kadar iyi koruyabileceğini etkiler. Bir füze rehberlik sistemi veya uzayda çalışan bir uydu düşünün. Her ikisi de uzun süreler boyunca son derece doğru verilere güvenir. Önyargı dengesizliğinin neden olduğu herhangi bir sapma, ciddi kümülatif hatalara yol açabilir, bu da sistemin yoldan çıkmasına neden olur. Bu nedenle, Havacılık ve Uzay'daki müşterilerle çalışırken, düşük önyargı instabilitesine her zaman yüksek önem veriyoruz-özellikle en küçük hataların bile önemli sonuçları olabileceği uzun süreli görevler için.
2. İlk önyargı
İlk önyargı, bir IMU'nun uzun vadeli doğruluğunu doğrudan etkileyen bir başka kritik faktördür. Bu, başlangıç anında sensörün ofset hatasını ifade eder. Esasen, herhangi bir ölçüm alınmadan önce var olan temel hatadır. İlk önyargı çok yüksekse, sonraki tüm okumaların doğruluğunu etkileyerek tüm sistemi hatalara eğilimli hale getirecektir.
Bu, IMU'nun yeniden kalibrasyon olmadan uzun süre çalışması gereken uygulamalar için özellikle önemlidir. Otonom araçlar veya dronlar gibi sistemlerde IMU, çalışma süresi boyunca doğru veriler sağlamalıdır. Küçük bir başlangıç önyargısı bile, açıklanmazsa zaman içinde önemli hatalara yol açabilir. Bu nedenle, yüksek hassasiyetli sistemlerde, bir sorun haline gelmeden önce başlangıç önyargısını düzeltmek için IMU'nun başlangıçta kalibre edilmesini her zaman öneririz.
3. Aralık ve çözünürlük
Bir IMU seçerken, aralık ve çözünürlük her zaman birlikte düşünülmesi gereken iki özelliktir. Aralık, ölçülebilir maksimum ivmeyi veya açısal hızı tanımlarken, çözünürlük sensörün algılayabileceği en küçük değişikliktir.
IMU'nun bir otomotiv çarpışma algılama sistemi veya yüksek hızlı havacılık uygulamaları gibi yüksek kuvvetler yaşayacağı bir proje üzerinde çalışıyorsanız, geniş bir aralığa sahip bir sensör kritiktir. Sistemin sensörü doyurmadan aşırı koşulları ele alması gerekir. Öte yandan, IMU cerrahi robotlar veya İHA'lar gibi hassas güdümlü ekipmanlarda kullanılacaksa, hareketteki en küçük değişiklikleri yakalamak için yüksek bir çözünürlük gereklidir.
Uygulamaya bağlı olarak genellikle aralık ve çözünürlük arasında doğru dengeyi vurmamız gerekir. Bazı durumlarda, daha geniş bir aralık çözünürlüğü kurban eder, yani ince detaylar kaçırılabilir. Bununla birlikte, hassasiyetin en öncelikli olduğu bazı projeler için, daha sınırlı bir aralıkta çalışmak anlamına gelse bile daha yüksek çözünürlüğe öncelik veriyoruz.
4. Ölçek faktörü ve ölçek hatası
Ölçek faktörü esasen IMU'nun çıkışı ile gerçek fiziksel girdi arasındaki orandır. İdeal olarak, bu mükemmel bir eşleşme olmalı, ancak gerçekte, her sensörün bir ölçek hatası , bu da bu ideal orandan sapmadır.
Bu neden önemli? Çünkü ölçek faktörü ölçüm doğruluğunu . Ölçek hatası çok yüksek olduğunda, okumaları çarpıtır ve yanlış verilerin sisteme beslenmesine yol açar. Örneğin, bir dronun otopilot sisteminde, ölçek faktörü kapalıysa, sistem aslında bir tarafa yavaşça bankacılık yaptığında uçuş seviyesine inanabilir. Zamanla, bu hatalar birikir ve dronun yoldan sürüklenmesine neden olur.
Hassasiyetin en öncelikli olduğu sistemler geliştirirken, seçtiğimiz IMU'ların düşük ölçekli bir hataya ve yüksek ölçekli faktör kararlılığına sahip olmasını sağlıyoruz. Bu şekilde, güvendiğimiz ölçümlerin uzun operasyon dönemlerinde bile doğru ve tutarlı olduğunu biliyoruz.
5. Gürültü ve gürültü yoğunluğu
Gürültü herhangi bir sensörün doğal bir özelliğidir ve IMU'lar bir istisna değildir. Sensör çıkışındaki gerçek sinyali gizleyebilen rastgele dalgalanmaları ifade eder. Gürültü yoğunluğu, bu gürültü seviyesini belirli bir bant genişliğinde ölçer.
Robotik veya uydu navigasyonu gibi yüksek hassasiyetli uygulamalarda gürültüyü en aza indirmek kritiktir. Gürültü seviyesi çok yüksekse, verilerdeki küçük, gerçek hareketler ve rastgele dalgalanmalar arasında ayrım yapmak zorlaşır. Bu, gürültü yoğunluğunun temel bir spesifikasyon haline geldiği yerdir - özellikle de ince hareketlerin doğru bir şekilde yakalanması gereken dinamik ortamlarda.
Örneğin, milimetre alt hassasiyetine dayanan cerrahi robotlarda, yüksek gürültü seviyeleri tüm işlemi tehlikeye atan hatalar getirebilir. Deneyimden, az miktarda az miktarda gürültünün bile doğruluk hayati olduğunda daha büyük sorunlara kartopu yapabileceğini öğrendik. Düşük gürültü yoğunluğuna sahip bir IMU seçmek, sensörün parazit olmadan en küçük değişiklikleri alabilmesini sağlar.
6. Bant genişliği ve örnek hızı
Bant genişliği, bir IMU'nun doğru bir şekilde ölçebileceği frekans aralığını ifade ederken, numune oranı IMU'nun ne sıklıkta ölçüm aldığıdır. Birlikte, bu parametreler sensörün hızlı hareket eden, dinamik olayları ne kadar iyi yakalayabileceğini belirler.
Yüksek hızlı uygulamalar için-karmaşık ortamlarda dolaşan dronların veya otonom araçların-daha yüksek örnek oranları ve daha geniş bant genişliği çok önemlidir. Düşük bir örnek oranı, hızlı hareket eden senaryolarda kritik ayrıntıları kaçırabilir ve sistemden gecikmeli veya yanlış yanıtlara yol açabilir. Düşük bir numune oranı nedeniyle ani bir swerve almayan kendi kendine giden bir araba düşünün-felaket olabilir.
Buna karşılık, yapısal sağlık izleme gibi daha az dinamik uygulamalarda, bant genişliği ve örnek hızının o kadar yüksek olması gerekmez. Buradaki anahtar, IMU'nun özelliklerini sistemin operasyonel talepleriyle eşleştirmektir. Sıklıkla, bir örnek oranının çok düşükünün kaçırılmış detaylarla sonuçlandığını, çok yüksek bir oranın sistemi gereksiz verilerle ezebileceğini bulduk. Bu dengeye çarpmak çok önemlidir.
7. Rastgele Yürüyüş
Rastgele Yürüyüş , IMU'nun zaman içinde biriken küçük, rastgele hataları tanımlar. Her hata kendi başına önemsiz görünse de, toplandığında, sistemi gerçek konumundan veya yönünden uzaklaştırabilirler.
İHA veya uydu içerenler gibi uzun vadeli görevler boyunca, rastgele yürüyüş önemli konumsal hatalar getirebilir. Bir IMU sensöründe küçük bir rastgele yürüyüşün navigasyon sistemlerinin sadece birkaç saatlik çalıştıktan sonra yoldan uzaklaşmasına neden olduğu durumlar gördüm. Bu tür projelerde, düşük rastgele yürüyüşe sahip bir IMU seçmek, uzun vadeli doğruluğu korumak için çok önemlidir.
Rastgele yürüyüş, IMU'nun sürüklenmesini düzeltmek için harici referanslara güvenemediği GPS dengeli ortamlarda özellikle sorunlu hale gelir. Bu nedenle, herhangi bir yüksek hassasiyetli, uzun süreli sistemde dağıtmadan önce bir IMU'nun rastgele yürüyüş performansını test etmenizi ve değerlendirmenizi öneririz.
Uygulamanız için doğru IMU'yu nasıl seçersiniz?
Doğru atalet ölçüm ünitesinin (IMU) seçilmesi zor olabilir. Yıllar geçtikçe, yanlış IMU'nun seçilmesinin önemli proje gecikmelerine, maliyet aşımlarına ve hatta başarısızlığa yol açabileceğini ilk elden gördük. Anahtar, uygulamanızın özel ihtiyaçlarını anlamak ve IMU'nun
performans özellikleri Tek bedene uyan bir IMU yoktur-her proje birkaç faktörün dikkatle değerlendirilmesini gerektirir. İhtiyaçlarınız için en iyi IMU'yu seçerken neye bakmanız gerektiğini parçalayalım.
Dikkate alınması gereken faktörler: Performans özellikleri, çevre, boyut, maliyet
Her zaman baktığımız ilk şey performans özellikleridir . Tüm IMU'lar aynı şekilde inşa edilmez ve IMU'nun projenizin gereksinimlerini karşılayabilmesini sağlamak için özellikleri anlamak çok önemlidir. Önyargı instabilitesi , gürültü yoğunluğu , örnek hızı ve aralık gibi temel özellikler uygulamanızın talepleriyle uyumlu olmalıdır. yüksek hassasiyetli bir havacılık projesi üzerinde çalışıyorsanız , minimum önyargı kayması ve yüksek stabiliteye sahip bir IMU'ya ihtiyacınız olacak. Öte yandan, IMU bir tüketici elektronik cihazına giriyorsa, aşırı doğruluk üzerinden maliyet ve boyuta öncelik verebilirsiniz.
Aynı derecede önemli olan IMU'nun çalışacağı ortamdır Aşırı sıcaklıklara, titreşimlere veya neme maruz kalacak mı? IMU'nun sert veya öngörülemeyen ortamlarda kullanılabileceği savunma veya havacılık uygulamalarında sağlamlık önemli bir faktör haline gelir. Sağlamlaştırılmış IMU'lar bu koşullara dayanacak şekilde inşa edilmiştir, ancak daha yüksek bir maliyet ve daha büyük ayak izi ile gelirler. Flip tarafında, bir fabrika veya tüketici cihazının içindeki daha kontrollü ortamlar için, performansdan ödün vermeden daha hafif, daha ucuz bir IMU kullanabilirsiniz.
Boyut ve maliyet de, özellikle kompakt veya maliyete duyarlı uygulamalarla uğraşırken önemli faktörlerdir. Örneğin giyilebilir bir cihaz veya kompakt bir drone geliştiriyorsanız, IMU'nun boyutu ve güç tüketimi kritik kaygılardır. Uzay kısıtlamalarının pazarlık edilemez olduğu birçok proje üzerinde çalıştık ve daha küçük bir MEMS tabanlı IMU seçmek doğru çağrı oldu. Ancak unutmayın, daha küçük, daha ucuz IMU'larla değiş tokuş genellikle performanstadır-özellikle uzun vadeli istikrar ve hassasiyet açısından.
Maliyet de her zaman devreye girer. Üst düzey fiber optik jiroskop (FOG) IMU'lar eşsiz bir hassasiyet sunarken, MEMS tabanlı sistemlerden çok daha pahalıdır. Maliyet-performans değiş tokuşunu anlamak esastır. Uygulamanız bazı sürüklenmeyi tolere edebilirse veya zaman içinde yeniden kalibrasyona ihtiyaç duyabilirse, daha ucuz bir MEMS IMU yeterli olabilir. karşılayabileceğiniz en yüksek performanslı IMU'ya yatırım yapmak istersiniz
Uygulamanızın gereksinimlerini anlamak
başvurunuzun özel gereksinimlerine derin bir dalış yapmanızı öneririz . Her endüstri ve kullanım durumunun kendi talepleri vardır ve IMU buna göre seçilmelidir. İşte farklı sektörlerde neleri arayacağının hızlı bir dökümü:
- Endüstriyel uygulamalar : Endüstriyel ortamlarda sağlamlık ve dayanıklılık genellikle anahtardır. Makine, üretim veya ağır ekipmanlarda kullanılan IMU'lar titreşimlere, tozlara ve geniş sıcaklık aralıklarına dayanmalıdır. Ayrıca otomasyon ve kontrol sistemlerini geliştirmek için gerçek zamanlı veriler yüksek hassasiyetle sağlayabilen bir IMU istersiniz. Çoğu endüstriyel proje için, orta menzilli bir MEMS IMU'nun genellikle dayanıklılık ve performans arasındaki tatlı noktaya çarpabileceğini bulduk.
- Tüketici Elektroniği : Akıllı telefonlar, fitness izleyicileri veya VR kulaklıklar gibi tüketici cihazları için odak genellikle maliyet, boyut ve güç tüketimidir . Bu uygulamaların askeri sınıf hassasiyetine ihtiyacı yoktur, ancak tutarlı bir şekilde performans gösterebilen küçük, düşük güçlü IMU'lar gerektirirler. MEMS IMU'lar bu alana hakimdir, çünkü ucuz ve enerji tasarrufludur, bu da onları pille çalışan cihazlar için ideal hale getirir. Bu sektördeki bir dizi üreticiyle çalıştık ve çoğu tüketici elektroniği için en büyük zorlukların güç yönetimi ve entegrasyon etrafında - mutlaka aşırı bir doğruluk olmadığını güvenle söyleyebiliriz.
- Otomotiv : Otomotiv dünyasında IMUS, Gelişmiş Sürücü Yardım Sistemleri (ADAS) ve otonom araçlar için giderek daha önemli hale geliyor. Burada, hassasiyet ve güvenilirlik çok önemlidir, ancak endüstrinin ölçeği göz önüne alındığında maliyet verimliliği de geçerlidir. Bu uygulamalar için, kararlı, gerçek zamanlı veriler sağlarken sıcaklık dalgalanmalarına ve yoldan titreşimlere dayanabilen bir IMU'ya ihtiyacınız olacak. Genellikle bu koşullar için özel olarak tasarlanmış otomotiv sınıfı MEMS IMU'ları, maliyet ve güvenilirlik arasında bir denge kurarak öneririz.
- Havacılık ve Savunma : Havacılık ve Savunma için hata için yer yok. Bir füzeye rehberlik etmek, bir uyduyu stabilize etmek veya GPS ile dengeli ortamlarda bir İHA gezmek olsun, uzun süreler boyunca minimum sürüklenme sağlayabilecek yüksek performanslı IMU'lara Fiber-optik jiroskop (SIG) IMU'lar veya halka lazer jiroskoplar (RLG), bu uygulamalarda hassas ve uzun süreli stabiliteleri için tipik olarak kullanılır. Bu sistemler daha pahalı ve daha hantaldır, ancak yüksek bahisli ortamlarda yatırıma değer.
IMU seçerken kaçınılması gereken yaygın hatalar
Yıllar boyunca, insanların bir IMU seçerken yaptıkları bazı yaygın hatalar gördük. Bu tuzaklardan kaçınmak uzun vadede hem zaman ve paradan tasarruf edebilir.
- IMU'yu aşırı belirleyen veya yetersiz belirleyen : karşılaştığımız en sık görülen sorunlardan biri, IMU'yu proje için aşırı spekit etme veya yetersiz belirleme eğilimidir. Bazı ekipler, tüm üsleri kapsayacağını düşünerek piyasadaki en üst düzey IMU'yu tercih eder, ancak bu genellikle gereksiz maliyetlere ve karmaşıklığa yol açar. Flip tarafında, en ucuz seçeneğe gitmek, özellikle yüksek talep edilen ortamlarda performans sorunlarına neden olabilir. Aşırı uçları seçmek yerine IMU'nun spesifikasyonlarını uygulamanın gerçek ihtiyaçları ile dengelemek çok önemlidir.
- Çevresel faktörleri görmezden gelmek : Projelerin başarısız olduğunu gördük çünkü ekipler çalışma ortamını açıklamadı. IMU'lar sıcaklık değişikliklerine, titreşimlere ve diğer dış koşullara duyarlıdır. Özel ortamınızda çalışacak şekilde tasarlanmamış bir IMU seçmek, kalibrasyon kaymasına, arızaya veya yanlış verilere yol açabilir. Her zaman IMU'nun gerçek dünyadaki kullanımda karşılaşacağı koşulları ele almak için oluşturulduğundan emin olun.
- Gelecek ölçeklenebilirliği dikkate almamak : Anında proje ihtiyaçlarına odaklanmak kolaydır, ancak uygulama daha büyük bir sistemin veya ürün hattının bir parçasıysa, ölçeklenebilirlik dikkate alınmalıdır. İster daha yüksek hassasiyetli görevlere genişlemeyi veya daha gelişmiş kontrol sistemleriyle entegre olmayı planlıyor olun, gelecekteki taleplerle ölçeklenebilecek bir IMU seçmek daha sonra zaman ve kaynaklardan tasarruf edebilir.
- Veri İşleme Gereksinimleri , IMU'nun verilerini işlemek için gereken hesaplama yükünü dikkate almamaktır Yüksek performanslı IMU'lar, gerçek zamanlı olarak işlenmesi gereken önemli miktarda veri üretir. Sistemin hesaplama kaynakları bunun için hazırlanmıyorsa, IMU'nun tam potansiyeli gerçekleşmez. Uygulamanızın gelen verileri işlemek için gerekli işleme gücüne ve algoritmalarına sahip olduğundan emin olun.