İçindekiler
- IMU nedir?
- Ataletsel ölçüm biriminin bileşenleri
- Ataletsel ölçüm birimi nasıl çalışır?
- Özerk ve kendi kendine giden araçlar
- Havacılık ve Havacılık
- Robot
- Sanal Gerçeklik (VR) ve Artırılmış Gerçeklik (AR)
- Tıbbi cihazlar
- Spor Analizi ve Hareket Yakalama
- Tüketici Elektroniği
- MEMS IMU vs Sis IMU: Temel Farklılıklar
- MEMS IMU: Genel Bakış ve Özellikler
- Sis IMU: Genel Bakış ve Özellikler
- IMU Performans Göstergeleri
- IMU Kalibrasyon Yöntemleri
- Atalet ölçüm birimlerinin avantajları
- Atalet ölçüm birimlerinin sınırlamaları
- IMU VS AHRS (Tutum ve Başlık Referans Sistemi)
- IMU VS INS (Atalet Navigasyon Sistemi)
- Farklı IMU'lar ve pazara genel bakış
- Gelecekteki eğilimler ve atalet ölçüm biriminin gelişimi
Giriş
Ataletsel ölçüm birimleri (IMU'lar), günümüzün yüksek teknoloji endüstrilerinde özerk araçlar, robotik ve havacılık ve uzay da dahil olmak üzere çok önemlidir. Bununla birlikte, yaygın kullanımlarına rağmen, birçoğu hala IMUS'un nasıl çalıştığını ve potansiyellerini tam olarak anlamak için mücadele etmektedir. Bu anlayış olmadan, sistem performansında verimsizlik ve hatalar riski vardır. Bu makalede, IMU'ların temellerini, uygulamalarını ve gelecekteki eğilimleri keşfedeceğiz ve bu teknolojiden en iyi şekilde yararlanmanızı sağlayacağız.
Ataletsel bir ölçüm ünitesi (IMU), bir nesnenin yönünü ve konumunu belirlemek için ivme, açısal hız ve bazen manyetik alanları ölçen bir cihazdır. IMU'lar navigasyon, kontrol sistemleri ve hareket izlemede gereklidir. Sensör verilerini birleştirerek, IMU'lar GPS sinyallerinin zayıf veya kullanılamayacağı ortamlarda hareket ve yönün hassas izlenmesini sağlar.
IMUS'un geleceği heyecan verici, sensör füzyonu ve AI entegrasyonu yeni olasılıklar açıyor. Bu sistemlerin nasıl çalıştığı ve geleceğin en son teknolojilerdeki rolleri için neler yapacağına bakalım.
Atalet ölçüm ünitesinin temelleri (imu)
Ataletsel ölçüm biriminin bileşenleri
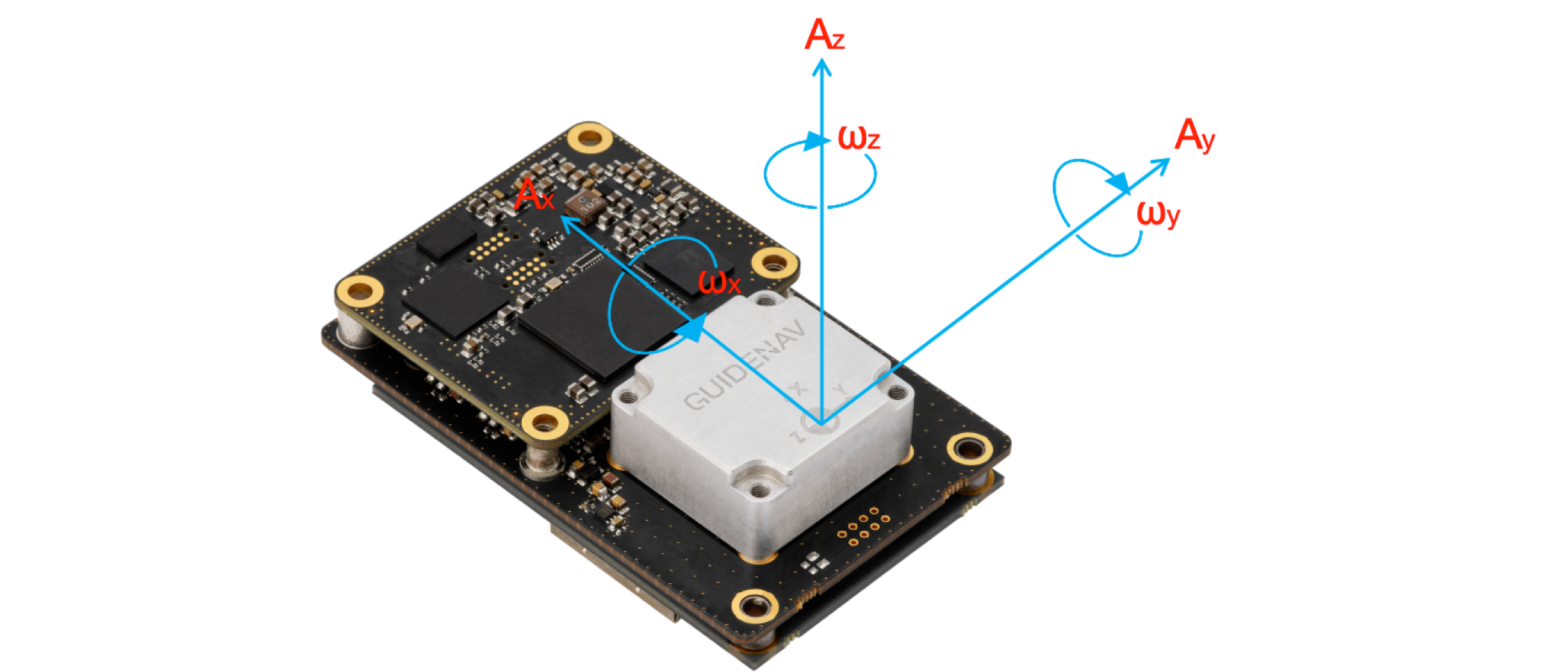
Bir IMU tipik olarak aşağıdaki anahtar sensörleri içerir. Onları yıkalım ve her birinin genel işlevselliğe nasıl katkıda bulunduğuna bakalım:
| Bileşen | İşlev | Çıktı |
|---|---|---|
| İvmeölçer | X, Y ve Z eksenleri boyunca doğrusal ivmeyi ölçer. | Hız ve yer değiştirme hakkında veri sağlar. |
| Jiroskop | X, Y ve Z eksenlerinin etrafındaki açısal hızı (dönüş hızı) ölçer. | Oryantasyon (tutum) hakkında veri sağlar. |
| Manyetometre (isteğe bağlı) | Dünyanın manyetik alanına göre manyetik alan gücünü ve yönünü ölçer. | Başlık sağlar (pusula yönü). |
Bu sensörlerin her biri, nesnenin uzayda nasıl hareket ettiğini ve döndüğünü anlamamıza yardımcı olan gerçek zamanlı hareket verileri sağlamada önemli bir rol oynar.
Ataletsel ölçüm birimi nasıl çalışır?
GuiTenav'da IMUS'u sorunsuz bir şekilde işleyecek şekilde
- Hızlanma ölçümü : ivmeölçer, üç eksen boyunca hız değişikliklerini tespit eder. Bu veriler, nesnenin ne kadar hızlı hızlandığını veya yavaşladığını belirlememizi sağlar, bu da zaman içinde yer değiştirmeyi izlemek için kritiktir.
- Açısal hız ölçümü : Gyroskop, nesnenin üç eksenin her birinde ne kadar döndüğünü izler. Bu dönme verilerini zaman içinde entegre ederek, IMU bize nesnenin uzaydaki kesin yönelimini söyleyebilir.
- Manyetik alan ölçümü (isteğe bağlı) : Dahil ise, manyetometre bir pusula başlığı sağlayarak dünyanın manyetik alanını ölçer. Bu, jiroskop okumalarındaki herhangi bir sürüklenmenin düzeltilmesine yardımcı olur ve IMU'nun uzun süre doğru kalmasını sağlar.
GuiTenav'da bu bileşenlerden elde edilen verileri birleştirmek için sensör füzyon algoritmalarını kullanıyoruz Bunu yaparak, nesnenin 3D uzayda konumunun ve yönünün son derece doğru bir gösterimini yaratırız.
Atalet ölçüm birimlerinin uygulamaları (IMUS)
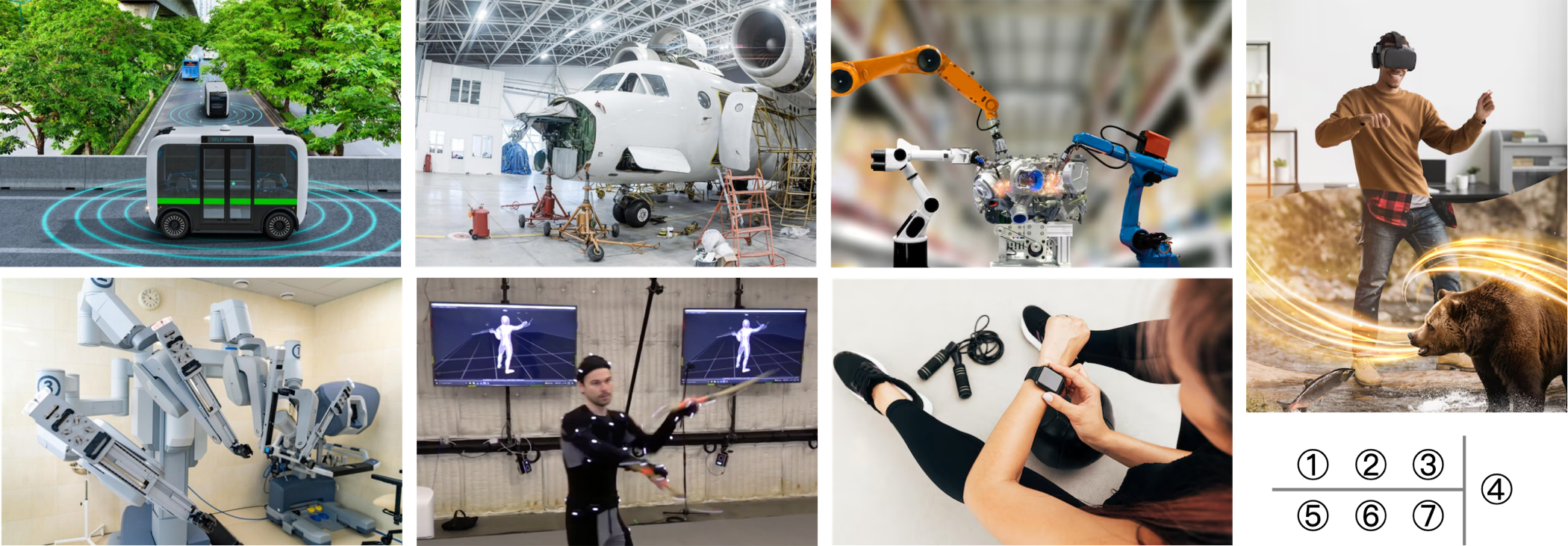
Ataletsel ölçüm birimleri (IMU'lar), hızlanma, açısal hız ve bazen manyetik alanlar hakkında temel veriler sağlayan çok çeşitli uygulamalarda kullanılır. Onların hassasiyeti ve çok yönlülüğü, otonom araçlar, havacılık, robotik, sanal gerçeklik, sağlık, spor analizi ve tüketici elektroniği gibi sektörlerde onları çok önemli hale getirir. Aşağıda, IMU'ların vazgeçilmez olduğu bazı temel uygulamaları keşfedeceğiz.
1. Otonom ve kendi kendine giden araçlar
otonom araçların geliştirilmesi ve işletilmesinde kritik öneme sahiptir . Aracın hareketini ve oryantasyonunu gerçek zamanlı olarak izlemeye yardımcı olurlar, stabilite ve hassas navigasyon sağlar. Global Konumlandırma Sistemi (GPS) genellikle konumlandırma için kullanılırken, GPS sinyalleri zayıf veya kullanılamadığında (örneğin tünellerde, kentsel kanyonlarda veya uzak alanlarda) IMU'lar
| Başvuru | IMU'nun rolü |
|---|---|
| Özerk arabalar | Kararlı navigasyon sağlamak için araç oryantasyonu ve hareket hakkında veri sağlar. |
| Dronlar | Uçuş yolu ve pozisyonunun kesin kontrolünü sağlar. |
| Robotik araçlar | Off-road veya GPS dengeli ortamlarda hareketi izler. |
2. Havacılık ve Havacılık
havacılık ve havacılık ayrılmaz bir parçası olmuştur . Uçak ve uzay aracının oryantasyonu ve hareketi hakkında gerçek zamanlı veriler sağlarlar. ticari havacılık hem de uzay araştırmalarında kullanılır , GP'lerin mevcut veya pratik olamayacağı zorlu ortamlarda yüksek güvenilirlik ve doğruluk sağlar.
| Başvuru | IMU'nun rolü |
|---|---|
| Uçak navigasyonu | Kararlı uçuş için tutum (oryantasyon) verileri sağlar. |
| Uzay aracı navigasyonu | Uzayda hassas yönelim ve hareket kontrolü sağlar. |
| Uydu oryantasyonu | Operasyon sırasında uydu yönünü ve yörüngesini korur. |
3. Robotik
Robotiklerde IMU'lar , endüstriyel, tıbbi veya tüketici uygulamalarında robotların hareketini, yönünü ve dengesini izlemek için kullanılır. IMUS, robot kontrol sistemlerine geri bildirim sağlar ve çeşitli ortamlarda sorunsuz ve doğru hareket sağlar.
| Başvuru | IMU'nun rolü |
|---|---|
| Endüstriyel Robotlar | Üretim görevleri sırasında istikrarlı hareket sağlar. |
| Tıbbi robotlar | Ameliyatlar ve rehabilitasyon için kesin hareket kontrolü sağlar. |
| Özerk robotlar | Dinamik ortamlarda navigasyon için pozisyon ve yönlendirme izler. |
4. Sanal gerçeklik (VR) ve Artırılmış Gerçeklik (AR)
Sanal gerçeklik (VR) ve artırılmış gerçeklik (AR) dünyasında IMUS, kullanıcıların baş ve vücut hareketlerini izlemek için temel bileşenlerdir. IMUS, dönme, ivme ve bazen manyetik alanları ölçerek, sürükleyici deneyimi geliştiren gerçek zamanlı hareket verileri sağlar.
| Başvuru | IMU'nun rolü |
|---|---|
| VR kulaklıklar | Sanal ortamı ayarlamak için kafa hareketlerini izler. |
| AR Cihazları | Sanal nesnelerle etkileşim kurmak için el hareketlerini izler. |
| Jest kontrolü | AR/VR sistemlerinde etkileşim için kullanıcı hareketlerini tanır. |
5. Tıbbi Cihazlar
, hareket izleme, rehabilitasyon ve teşhis de dahil olmak üzere çeşitli amaçlar için tıbbi cihazlara entegre edilmektedir Kesin hareketleri ölçme yetenekleri, onları hastanın ilerlemesini anlamak ve izlemek için çok değerli hale getirir.
| Başvuru | IMU'nun rolü |
|---|---|
| Fiziksel rehabilitasyon | İlerlemeyi izlemek için tedavi sırasında hastaların hareketlerini izler. |
| Giyilebilir cihazlar | Parkinson hastalığı olan hastalar gibi hareket bozukluklarını izler. |
| Teşhis için hareket yakalama | Teşhis amaçlı anormal hareketleri ölçer. |
6. Spor Analizi ve Hareket Yakalama
sporcuların performansını izlemek ve hareketlerini optimize etmek için spor analitiğinde ve hareket yakalamasında yaygın olarak kullanılmaktadır IMUS tarafından sağlanan kesin hareket izleme, yaralanma önleme, performans analiz ve iyileştirmeye yardımcı olur.
| Başvuru | IMU'nun rolü |
|---|---|
| Sporcu performansı | Hız, ivme ve verimliliği analiz etmek için hareket verilerini izler. |
| Yaralanma önleme | Riskleri tanımlamak ve eğitimi optimize etmek için hareketleri izler. |
| Hareket yakalama | Film, animasyon ve oyunlarda kullanım için insan hareketini yakalar. |
7. Tüketici Elektroniği
akıllı telefonlar, giyilebilir cihazlar ve oyun denetleyicileri gibi tüketici elektroniği gömülüdür Bu cihazlar, hareket ve oryantasyonu tespit etmek için IMU'ları kullanır, çeşitli özellikler sağlar ve kullanıcı deneyimini geliştirir.
| Başvuru | IMU'nun rolü |
|---|---|
| Akıllı telefon | Ekran döndürme, hareket tabanlı kontroller ve etkinlik izlemesini sağlar. |
| Fitness izleyicileri | Adım sayısı, mesafe ve fiziksel aktiviteyi izler. |
| Oyun denetleyicileri | Sürükleyici oyun deneyimleri için oyuncu hareketlerini izler. |
Atalet Ölçüm Birimi (IMU) Türleri: MEMS IMU VS SİSTE IMU
yüksek hassasiyetin kritik olduğu savunma ve havacılık gereklidir İki ana IMU türü, MEMS IMU'lar (mikro-elektro-mekanik sistemler) ve sis IMU'ları (fiber optik jiroskop IMU'lar) , farklı uygulamalar için performans, boyut, maliyet ve uygunluk açısından önemli ölçüde farklılık gösterir.
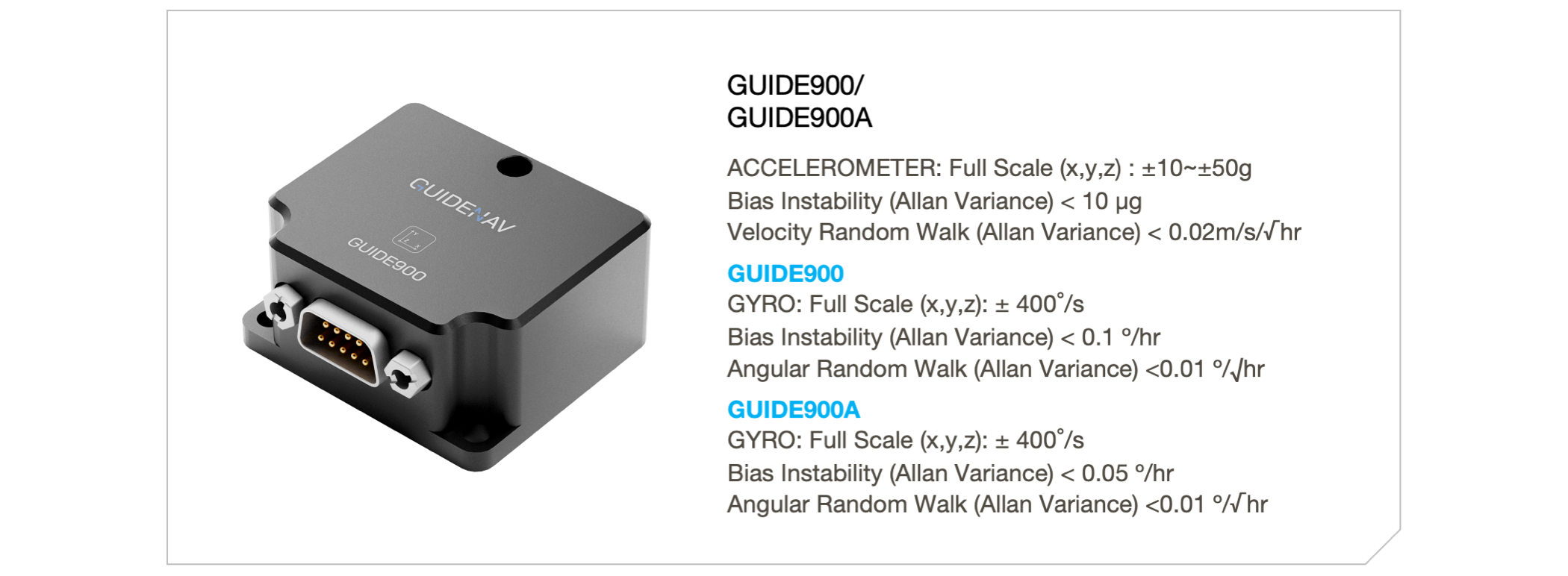
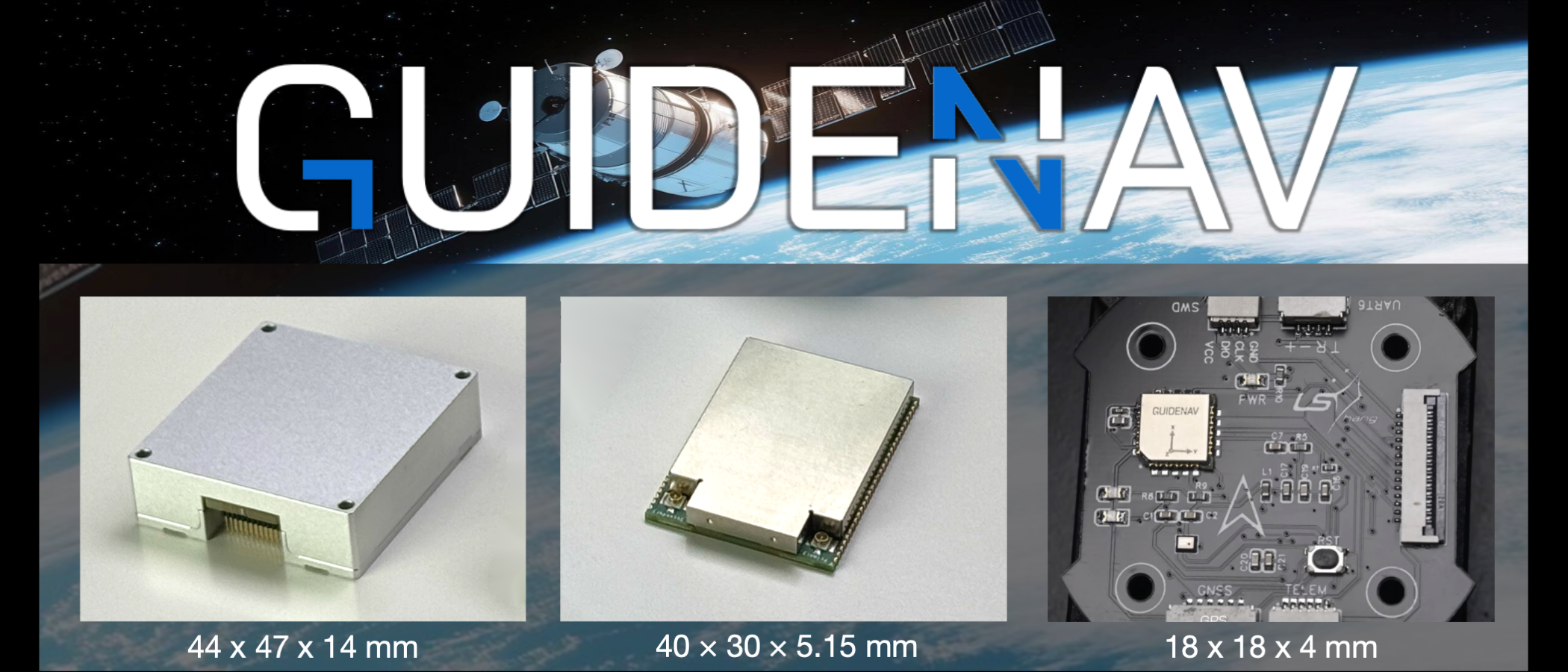
Sis IMU'ları geleneksel olarak havacılık, savunma ve robotik gibi yüksek hassasiyetli alanlarda kullanılmasına rağmen Guide900 ve Guide900a gibi MEMS IMU'lardaki artık sis IMU'larına karşılaştırılabilir 0.1 °/saat ve 0.05 °/saat . Bu gelişme, MEMS IMU'ların Sis IMUS'un egemen olduğu yüksek hassasiyetli uygulamalarda kullanılmasını .
MEMS IMU vs Sis IMU: Temel Farklılıklar
| Parametre | Mems imu | Sis imu |
|---|---|---|
| Teknoloji | Mikro-elektro-mekanik sistemler (MEMS) dayanmaktadır . | Açısal hız ölçümü için fiber optik jiroskoplar (sisler) kullanır |
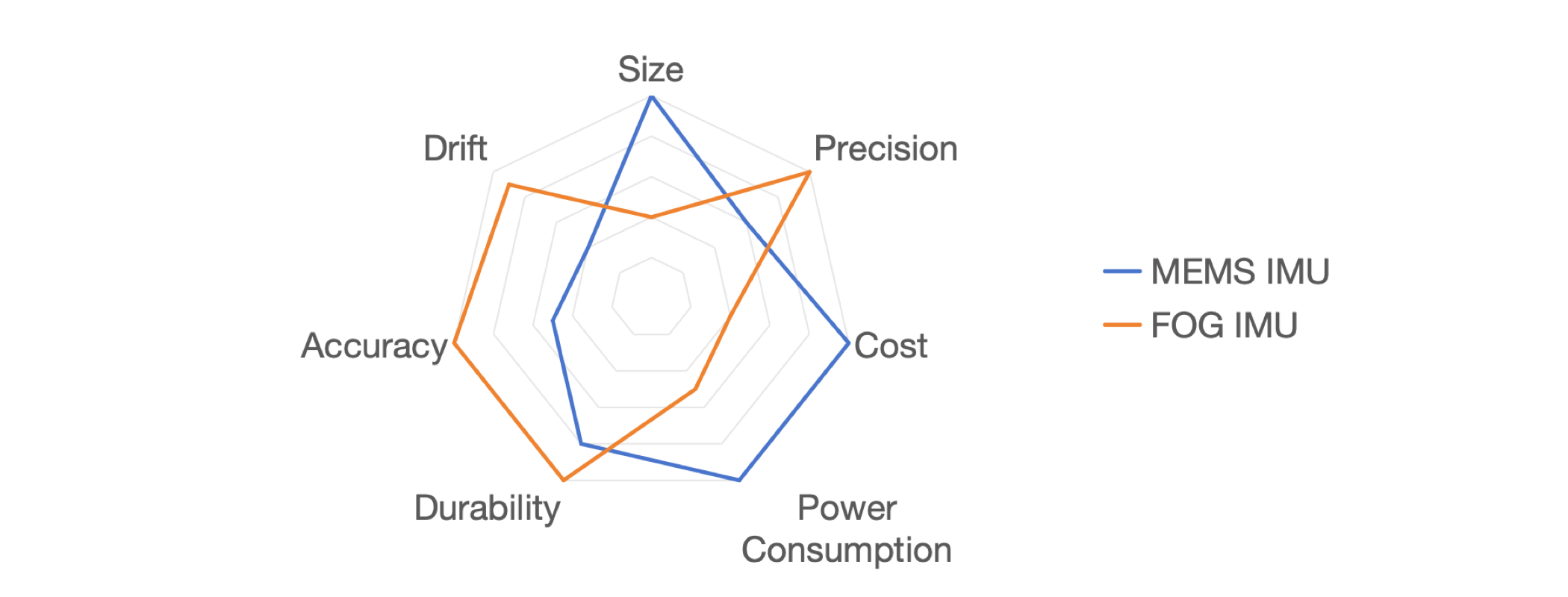
| Boyut | Kompakt ve hafif , taşınabilir cihazlar için idealdir. | Büyük ölçekli sistemlerde hassas uygulamalar için daha büyük, daha sağlam, uygun. |
| Kesinlik | Orta hassasiyet, ancak daha yeni yüksek hassasiyetli MEMS IMU'lar 0.1 °/saat veya 0.05 °/saat . | Zaman içinde son derece yüksek hassasiyet, minimal sürüklenme ve daha kararlı. |
| Maliyet | Düşük maliyetli, onları kitlesel pazar uygulamaları için ideal hale getirir. | Üst düzey sistemlerde kullanılan ileri teknoloji nedeniyle daha yüksek maliyet. |
| Güç tüketimi | Pille çalışan cihazlar için uygun düşük güç tüketimi | Daha yüksek güç tüketimi, daha yüksek enerji bütçeleri olan sistemler için daha uygun. |
| Dayanıklılık | Aşırı çevre koşulları altında daha az dayanıklı. | Çok dayanıklı, zorlu ortamları ele alabilen. |
| Kesinlik | Daha düşük-orta-orta hassas uygulamalar için uygundur. | Yüksek doğruluk, yüksek hassasiyetli navigasyon ve stabilite için uygun. |
| Başvuru | Tüketici Elektroniği, Otomotiv Sistemleri, Dronlar, İHA'lar, ** Askeri Sistemler **. | Havacılık, savunma, endüstriyel robotik, üst düzey navigasyon sistemleri. |
| Sürüklenme | Yeniden kalibrasyon gerektiren zaman içinde daha yüksek sürüklenme. | Çok düşük sürüklenme, yeniden kalibrasyon olmadan uzun süreli çalışma için idealdir. |
| Yanıt Süresi | Daha küçük boyut ve daha basit tasarım nedeniyle daha hızlı yanıt. | Biraz daha yavaş yanıt, ancak zaman içinde daha yüksek stabilite sunar. |
MEMS IMU: Genel Bakış ve Özellikler
MEMS I Nertial ölçüm birimleri , küçük mekanik bileşenlerin bir mikroçip üzerinde elektronik ile entegre edildiği mikro-elektro-mekanik sistemler (MEMS) kullanır MEMS IMU'larının birincil avantajları küçük boyutları , düşük maliyetleri ve düşük güç tüketimidir . Bu özellikler MEMS IMU'ları tüketici elektroniği, otomotiv sistemleri ve giderek daha fazla askeri uygulamalardaki .
GuiTenav'da 0.1 °/saat ve 0.05 °/saatlik doğruluklar sağlayan Guide900 ve Guide900A gibi MEM'lerimizle gurur duyuyoruz bu Sis IMU'larının bazı yüksek hassasiyetli uygulamalar .
MEMS IMUS'un temel özellikleri:
- Küçük boyut Akıllı telefonlar , giyilebilir cihazlar ve askeri dronlar gibi kompakt uygulamalar için mükemmel .
- Düşük Maliyet Otomotiv sistemleri , tüketici elektroniği ve performansı uygun fiyatla dengelemesi gereken savunma sistemleri gibi büyük hacimlere sahip uygulamalar için idealdir
- Orta Hassasiyet : MEMS IMU'lar Fog IMU'lardan daha düşük bir doğruluk sunsa , yüksek hassasiyetli modeller artık birçok savunma uygulaması için bu boşluğu kapatıyor.
- Düşük Güç Tüketimi : Pil tarafından işletilen cihazlar için yüksek verimli, askeri dronlar , akıllı silah sistemleri ve diğer mobil savunma teknolojileri için çok önemli.
MEMS IMUS uygulamaları:
- Savunma : Askeri dronlar , zırhlı araçlar için navigasyon sistemleri ve füze rehberlik sistemlerinde . MEMS IMUS'un kompaktlığı ve düşük maliyetinden yararlanır
- Tüketici Elektroniği : Akıllı telefonlarda , fitness izleyicilerinde ve oyun denetleyicilerinde .
- Otomotiv Sistemleri Araç stabilitesi kontrolünde ve otonom navigasyonda kullanılır .
- Dronlar ve İHA'lar Askeri dronlarda ve tüketici sınıfı İHA'larda yönelim ve stabilizasyon sağlamak .
Sis IMU: Genel Bakış ve Özellikler
Sis IMU'lar, fiber optik jiroskopları (sisler) kullanır , bu da son derece yüksek hassasiyet ve stabilite sağlamalarını sağlar. Bu, havacılık navigasyonu , füze rehberliği ve üst düzey robotik gibi minimum sürüklenme ve uzun vadeli güvenilirlik gerektiren uygulamalar için Sis IMUS'u .
Sis imus hassasiyetleri ve dayanıklılıkları için yaygın olarak görülse de MEMS IMU'lar, maliyet, boyut ve güç tüketiminin kilit hususlar olduğu askeri uygulamalarda , performanstaki boşluğu kapatıyor
Sis IMUS'un temel özellikleri:
- Yüksek hassasiyet : Sis IMUS son derece düşük bir sürüklenme sunar, bu da onları uydu navigasyonu ve askeri rehberlik sistemleri gibi yüksek hassasiyetli uygulamalar
- Dayanıklılık : Aşırı çevresel koşulları ele alma yeteneği ile Sis IMU'ları zorlu ortamlarda çalışması gereken havacılık ve askeri sistemler için idealdir
- Daha yüksek güç tüketimi : Sis IMU'ları genellikle daha fazla güç tüketir, bu da onları yeterli enerji kaynaklarına sahip sistemler için daha uygun hale getirir.
- Daha büyük boyut : Sis IMU'ları MEMS IMU'lara kıyasla daha hantaldır uçak ve uzay aracı gibi daha büyük sistemlerde kullanılırlar .
Sis IMUS uygulamaları:
- Havacılık ve Uzay Yüksek hassasiyet ve stabilitenin kritik olduğu uçak ve uydu navigasyonunda kullanılır
- Savunma : Füze rehberliğinde , insansız askeri araçlarda ve askeri navigasyon sistemlerinde .
- Üst düzey robotik : Hassasiyet ve uzun süreli stabilitenin gerekli olduğu endüstriyel robotik , cerrahi robotlar ve otonom navigasyon sistemlerinde
Mems Imu vs Sis IMU ne zaman seçilir
| Kullanım Kılıfı | Mems imu | Sis imu |
|---|---|---|
| Tüketici Elektroniği | Akıllı telefonlar, giyilebilir cihazlar ve fitness izleyicileri için idealdir. | Yüksek maliyet ve güç tüketimi nedeniyle uygun değildir. |
| Havacılık ve Havacılık | Orta hassas gereksinimlere sahip düşük maliyetli, küçük sistemler için uygundur. | Yüksek hassasiyetli navigasyon ve oryantasyon sistemleri için gereklidir. |
| Özerk araçlar | Orta performans gereksinimlerine sahip daha düşük maliyetli çözümler için iyi. | Karmaşık ortamlarda yüksek hassasiyetli navigasyon için gereklidir. |
| Askeri ve Savunma | ** Askeri Dronlar **, ** Navigasyon Sistemleri ** ** Araçlar ** için kullanılır ** ve ** Füze rehberlik sistemleri **. | Zorlu koşullarda füze rehberliği, dronlar ve navigasyon için yaygın olarak kullanılır. |
| Robot | Tüketici sınıfı robotlar veya eğitim projeleri için uygundur. | Endüstriyel robotlar, cerrahi robotlar ve diğer hassas tabanlı sistemler için tercih edilir. |
Ataletsel Ölçüm Birimi (IMU) Performans ve Kalibrasyon
Atalet ölçüm birimlerinin (IMU'lar) performansı, sensör kayması, sıcaklık ve çevresel koşullar gibi çeşitli faktörlerden etkilenebilir. Optimum performansı sağlamak için, IMU'ların temel performans göstergelerini (KPI) ve doğruluklarını artırmak için kullanılan kalibrasyon yöntemlerini anlamak önemlidir.
IMU Performans Göstergeleri
Ataletsel bir ölçüm ünitesinin (IMU) performansı, doğruluğunu ve güvenilirliğini doğrudan etkileyen birkaç temel faktöre dayanarak değerlendirilir. IMUS için en önemli performans göstergeleri aşağıdadır:
| Performans göstergesi | Tanım |
|---|---|
| Önyargı istikrarı | IMU'nun okumalarının zamanla tutarlılığı. Kararlı bir IMU, ölçümlerde minimum sapmaya sahip olacaktır. |
| Ölçek faktörü | Gerçek fiziksel hareket ile IMU'nun çıkışı arasındaki oran. Bu orandaki herhangi bir hata yanlış veri yorumlamasına yol açabilir. |
| Gürültü | IMU'nun sensör okumalarında rastgele varyasyonlar. Düşük gürültü seviyeleri, ölçümlerde daha yüksek doğruluk olduğunu gösterir. |
| Rastgele yürüyüş | Zaman içindeki ölçümlerdeki kaymayı açıklar. Ölçümün rastgele gürültü nedeniyle gerçek değerinden ne kadar saptığını ifade eder. |
| Çözünürlük | IMU'nun sensör okumalarındaki en küçük ölçülebilir değişiklik. Daha yüksek çözünürlük, ölçümlerin doğruluğunu artırır. |
| Doğrusal olmama | Giriş ve çıktı arasındaki düz çizgi ilişkisinden sapma. Doğrusal olmayanlıklar, daha yüksek hızlarda veya açısal hızlarda hatalara neden olabilir. |
| Sıcaklık hassasiyeti | Ortam sıcaklığındaki değişikliklere bağlı IMU ölçümlerindeki varyasyon. Düşük sıcaklık duyarlılığına sahip IMU'lar dalgalanan çevre koşullarında daha doğrudur. |
IMU Kalibrasyon Yöntemleri
, sensör kayması, yanlış hizalanma ve diğer faktörlerden kaynaklanabilecek hataları düzelterek atalet ölçüm ünitesinin (IMU) doğruluğunu artırmaya yardımcı olan hayati bir süreçtir IMU kalibrasyonu tipik olarak üç birincil sensör sistemi içerir: ivmeölçer , jiroskop ve manyetometre . Bu sensörlerin her biri, doğru ve güvenilir ölçümler sağlamak için spesifik kalibrasyon teknikleri gerektirir.
1. İvmeölçer kalibrasyonu
Bir IMU'daki ivmeölçer, X, Y ve Z eksenleri boyunca doğrusal ivme ölçer . Bununla birlikte, genellikle ölçek faktörü sapmaları, yanlış hizalamalar ve eksenlerin ortogonallığı gibi hatalara tabidir.
| Kalibrasyon yöntemi | Tanım |
|---|---|
| Statik kalibrasyon | IMU'nun bilinen bir oryantasyona yerleştirildiği yaygın bir yöntem (örneğin, bir yüzey üzerinde düz). Yerçekimi (9.81 m/s²) nedeniyle hızlanmayı ölçerek, sensör hataları düzeltilebilir. |
| Dinamik kalibrasyon | IMU'yu, eksenler arasındaki ölçek faktörü hataları, önyargıları ve yanlış hizalanmayı düzeltmek için bilinen farklı ivmeler ve talimatlar yoluyla hareket ettirir. |
| Sıcaklık telafisi | Hızlandırıcılar sıcaklığa duyarlı olduğundan, kalibrasyon ayrıca ölçüm hatalarına neden olabilecek sıcaklık değişimlerini telafi etmeyi de içerir. |

2. Jiroskop kalibrasyonu
Jiroskop , IMU'nun X, Y ve Z eksenleri etrafındaki açısal hızı ölçer. sapma (sensör okumalarının zamanla yavaşça değiştiği yerlerde) ve önyargı instabilitesinden (ölçümlerde sabit bir ofsetin olduğu) muzdarip olabilir
| Kalibrasyon yöntemi | Tanım |
|---|---|
| Sıfır oranlı ofset kalibrasyonu | Bu yöntemde, jiroskop sabit bir konuma (hareket yok) yerleştirilir ve ofset veya önyargı ölçülür ve düzeltilir. |
| Oran tablosu kalibrasyonu | Bu, herhangi bir doğrusal olmayanlık veya ölçek faktörü hatalarını belirlemek için IMU'nun bilinen farklı açısal hızlarda döndürülmesini içerir. |
| Sıcaklık kalibrasyonu | Hızlandırıcılara benzer şekilde, jiroskoplar sıcaklık değişikliklerine duyarlıdır. Kalibrasyon, farklı sıcaklıklarda sensörün davranışındaki varyasyonları açıklar. |
Jiroskopun kalibrasyonu, IMU'nun açısal hız okumalarının doğru ve sürüklenmeden uzak olmasını ve dinamik ortamlardaki performansını artırmasını sağlar.
3. Manyetometre kalibrasyonu
Manyetometre, dünyanın manyetik alanının gücünü ve yönünü ölçerek, başlık belirleme için kullanılan oryantasyon verileri sağlar. Manyetometreler lokal manyetik bozukluklar, sensör yanlış hizalaması ve ölçek faktöründeki hatalardan etkilenebilir.
| Kalibrasyon yöntemi | Tanım |
|---|---|
| Sert demir kalibrasyon | Bu yöntem, IMU'nun kendi bileşenlerinin (örn. Elektronik cihazlar) neden olduğu manyetik alan bozulmalarını telafi eder. |
| Yumuşak demir kalibrasyonu | Çevredeki ortamın neden olduğu bozulmaların veya IMU yakınlarındaki malzemelerin düzeltilmesi. |
| Çok noktalı kalibrasyon | Manyetometre, hataları tespit etmek ve düzeltmek için bilinen çeşitli manyetik alan kuvvetlerine ve talimatlara maruz kalır. |
Manyetometre kalibrasyonu, özellikle IMU, değişen manyetik koşullara sahip ortamlarda kullanıldığında, doğru başlık ve oryantasyon verilerinin elde edilmesi için gereklidir.
Ataletsel Ölçüm Birimlerinin Avantajları ve Sınırlamaları (IMUS)
Ataletsel ölçüm birimleri olağanüstü gerçek zamanlı performans, bağımsızlık ve endüstriler arasında oldukça uyarlanabilir. Bununla birlikte, doğru teknolojiyi seçerken sürüklenmeleri , çevresel hassasiyetleri ve yüksek maliyetli hassas modellerinin MEM'ler IMU'lar birçok tüketici ve endüstriyel uygulamada maliyet ve performans arasında bir denge kurarken Fog IMU'lar havacılık ve savunmada yüksek hassasiyetli , uzun süreli için tercih edilir IMU'ların güçlü yönlerini ve sınırlamalarını anlamak, özel ihtiyaçlarınız için en iyi sistemi seçmenize yardımcı olur.
Atalet ölçüm birimlerinin avantajları
| Avantaj | Tanım |
|---|---|
| Dinamik ortamlarda yüksek hassasiyet | IMUS, GPS veya diğer harici referansların bulunamadığı otonom araçlar , havacılık ve robotlardaki uygulamalar için gerekli olan gerçek zamanlı ivme ve açısal hız ölçümleri |
| Dış sinyallerden bağımsızlık | GPS gibi harici sinyallere güvenmeden çalışır yeraltı navigasyonu , uzay araştırması veya kapalı robotik gibi ortamlarda onları son derece güvenilir hale getirir . |
| Kompakt ve hafif | MEMS IMU'lar küçük ve hafiftir, boşluk ve ağırlığın kritik olduğu giyilebilir cihazlar , dronlar ve tüketici elektronikleri |
| Düşük güç tüketimi | MEMS IMU'lar uzun süre çalışması gereken akıllı saatler ve fitness izleyicileri gibi pille çalışan cihazlar için mükemmel olan enerji tasarrufludur |
| Gerçek Zamanlı Veri İşleme | IMU'lar yüksek frekanslı, düşük gecikmeli veriler sunar, bu da onları robotik , dron stabilizasyonu ve araç navigasyonunda gerçek zamanlı kontrol . |
| Zorlu ortamlarda dayanıklılık | Sis IMUS ve bazı üst düzey MEMS IMU'lar, yüksek titreşim , sıcaklık varyasyonları ve şoklar gibi aşırı koşullara dayanabilir askeri ve havacılık uygulamaları için ideal hale getirebilir |
Atalet ölçüm birimlerinin sınırlamaları
| Sınırlama | Tanım |
|---|---|
| Zamanla Drift | IMUS'taki jiroskoplar zamanla sürüklenmeyi düzenli olarak yeniden kalibre edilmedikçe yanlış ölçümlere Bu, uzun süreli uygulamalarda önemli bir konudur. |
| Çevre hassasiyeti | bu rahatsızlıklara daha yatkın olan MEMS IMU'larda hatalar getirebilen sıcaklık ve titreşimler gibi çevresel koşullara duyarlıdır |
| Yüksek maliyet (yüksek hassasiyetli modeller için) | MEMS IMU'lar uygun maliyetli olsa da Sis IMU'ları gibi yüksek hassasiyetli IMU'lar pahalıdır ve yüksek maliyet ve güç tüketimi nedeniyle tüm uygulamalar için uygun olmayabilir. |
| Kısa vadeli doğruluk ve uzun vadeli istikrara karşı | büyük kısa vadeli doğruluk sunar , ancak harici düzeltme (örn. GPS uzun vadeli istikrarsızlık yaşarlar -uzun süreli yüksek dönemlerde yüksek hassasiyetli navigasyon görevleri için bir zorluk. |
| Veri füzyonunda karmaşıklık | IMU'lar genellikle sensör füzyonu (örneğin, GPS , manyetometreleri ) gerektirir, sisteme karmaşıklık ve hesaplama yükü ekler. |
| Yüksek dinamiklerde sınırlı doğruluk | Yüksek dinamik uygulamalarda , MEMS IMU'lar füze rehberliği veya uzay aracı oryantasyonu , ultra yüksek hassasiyet gerektiren uygulamalarda Sis IMU'larının hassasiyetiyle eşleşmeyebilir |
Ataletsel Ölçüm Birimi (IMU) VS Diğer Atalet Sistemleri: IMU VS AHRS, IMU VS INS
Ataletsel ölçüm birimleri (IMU'lar) birçok yüksek teknoloji uygulamasında gereklidir, ancak hareket, oryantasyon ve navigasyonu ölçmek için mevcut olan tek sistem değildir. Tutum ve Başlık Referans Sistemleri (AHR'ler) ve Ataletal Navigasyon Sistemleri (INS), atalet sensörlerine dayanan yaygın olarak kullanılan diğer iki sistemdir. IMU'lar hem AHR'ler hem de INS için temel veriler sağlarken, bu sistemler ek yetenekler sunar ve belirli kullanım durumları için tasarlanmıştır. IMUS'un AHRS ve INS ile nasıl karşılaştırıldığını keşfedelim .
IMU VS AHRS (Tutum ve Başlık Referans Sistemi)
IMUS ve AHR'lerin her ikisi de oryantasyon ve hareket izleme için kullanılır, ancak ek özellikler ve kendi kullanım durumları açısından farklılık gösterirler.
| Parametre | IMU | AHRS |
|---|---|---|
| Tanım | Bir ** Ataletsel Ölçüm Birimi (IMU) **, ham hareket verileri sağlayarak ivme ve açısal hızı ölçer. | ** Tutum ve Başlık Referans Sistemi (AHRS) **, ** IMU verilerini ** yönlendirme ve başlık verileri sağlamak için ek sensörlerle (örn. Manyetometreler) birleştirir. |
| Bileşenler | Tipik olarak ** ivmeölçerler ** ve ** jiroskoplar **, bazen ** manyetometreler ** içerir. | ** IMU verileri ** (ivmeölçerler ve jiroskoplar) artı ** manyetometreler ** ve bazen diğer sensörler (örneğin, ** gps **, ** barometreler **) kullanır. |
| Çıktı | Ham ivme ve açısal hız verileri sağlar. | Küresel bir çerçevede (örneğin, kuzey, doğu, aşağı) çıkış oryantasyonu (tutum) ve başlık (pusula yönü). |
| Kesinlik | IMU'lar doğru hareket izleme sağlar, ancak sensör hataları nedeniyle zamanla ** sürüklenme ** muzdarip olabilir. | AHRS, harici referansları (manyetometreler, GPS) kullanarak doğruluğu artırarak zamanla sürüklenmeyi azaltır. |
| Karmaşıklık | Tasarım ve operasyonda daha basit, genellikle temel hareket izleme için. | Ek nedeniyle daha karmaşık |
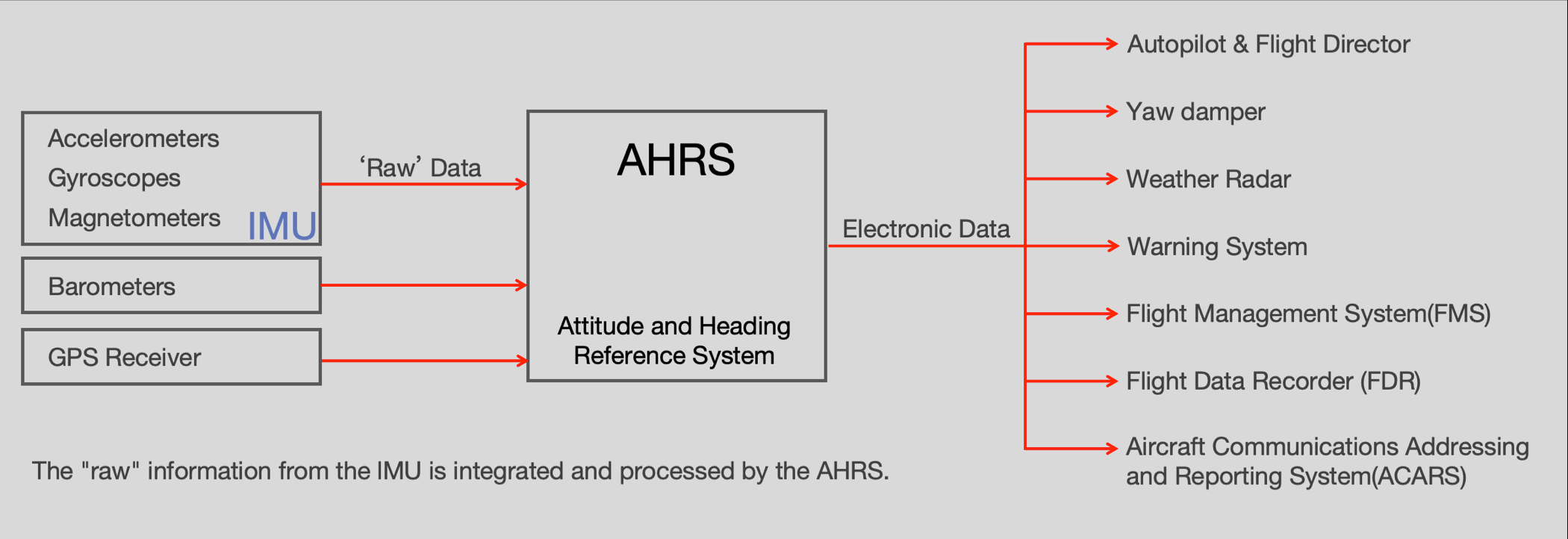
Anahtar fark : IMU'lar ham sensör verileri sağlarken, AHRS bu verileri hassas oryantasyon ve başlık sunmak için diğer sensörlerle (manyetometreler gibi) kaynaştırır. AHRS tipik olarak hassas tutum ve başlık bilgileri gerektiğinde kullanılır.
IMU VS INS (Atalet Navigasyon Sistemi)
Ataletsel navigasyon sistemi (INS), IMU verilerini ek işlem özellikleriyle entegre eden daha gelişmiş bir sistemdir bir nesnenin konumunu, hızını ve yönünü hesaplamak için Kalman filtreleme gibi algoritmalar
| Parametre | IMU | Kâr |
|---|---|---|
| Tanım | Bir ** Ataletsel Ölçüm Birimi (IMU) **, ham hareket verileri sağlayarak ivme ve açısal hızı ölçer. | Bir ** Ataletal Navigasyon Sistemi (INS) **, bir ** imu **'yı konum, hızı ve yönü izlemek için hesaplama işlemiyle (örn. Kalman filtresi) birleştirir. |
| Bileşenler | ** ivmeölçerler ** ve ** jiroskoplar ** içerir; Bazen ** manyetometreler **. | Sensör füzyonu ve bazen diğer sensörler için ** imu **, ** algoritmaları ** birleştirir (örneğin, ** GPS **). |
| Çıktı | Hızlanma ve açısal hız verileri sağlar. | Çıkışlar ** konum **, ** hız ** ve ** yönlendirme **, eksiksiz gezinme verileri sunar. |
| Kesinlik | IMUS, sürüklenme nedeniyle zaman içinde sınırlı doğruluğa sahiptir. | ** INS ** IMU verilerini algoritmalar ve bazen harici düzeltmelerle (örneğin GPS) kaynaştırarak zaman içinde doğruluğu artırır. |
| Karmaşıklık | Basit, sadece hareket verileri sağlar. | Veri füzyonu, sensör işleme ve hesaplama algoritmalarına duyulan ihtiyaç nedeniyle karmaşık. |
| Başvuru | Drone, otomotiv ve robot gibi temel hareket izleme için kullanılır. | ** uçak **, ** denizaltılar **, ** uzay aracı ** ve ** askeri uygulamalar ** için ** navigasyon ** için kullanılır, burada uzun vadeli pozisyon izlemenin kritik olduğu. |
Anahtar fark : IMU'lar hareket ve oryantasyonu ölçerken, INS, zaman içinde pozisyon , hız ve oryantasyonu hesaplamak için bu verileri algoritmalarla birlikte kullanır
Ataletsel Ölçüm Birimi Pazarı ve Gelecek Gelişimi: Türler, Piyasa Görünümü ve Eğilimler
Ataletsel ölçüm birimleri (IMU'lar), çeşitli endüstrilerdeki modern navigasyon, hareket izleme ve stabilite kontrol sistemlerinin ayrılmaz bir parçasıdır. Otonom sistemler , robotik , havacılık ve tüketici elektroniği için artan talep , IMU teknolojilerinin evrimini yönlendirerek dünya çapında benimsemelerini artırdı. IMUS pazarı genişlemeye devam ettikçe, farklı IMU'ları, mevcut pazar koşullarını ve gelecekteki gelişimlerini şekillendiren eğilimleri anlamak önemlidir.
Farklı IMU'lar ve pazara genel bakış
IMU'lar, her biri farklı doğruluk, boyut, maliyet ve performans gereksinimlerine hitap eden çeşitli şekillerde gelir. En sık kullanılan IMU'lar türleri MEMS IMU'lar , Sis IMUS ve RLG IMU'lardır (halka lazer jiroskop imus) . Her birinin benzersiz özellikleri vardır, bu da belirli uygulamalar için uygun hale getirir. Bu türlere ve mevcut piyasa senaryolarına bakalım.
1. MEMS IMUS
MEMS IMU'lar kompakt boyutları , düşük maliyetleri ve düşük güç tüketimi nedeniyle en yaygın olarak kullanılanlardır . Bu IMU'lar, ivmeyi ve açısal hızı ölçmek için mikroelektromekanik sistemlere (MEMS) sensörlere güvenir. MEMS IMU'lar tüketici elektroniği, otomotiv uygulamaları ve düşük maliyetli sistemler için oldukça uygundur.
| Karakteristik | Mems imu |
|---|---|
| Boyut | Kompakt , küçük ve hafif. |
| Maliyet | Düşük maliyet, onları kitlesel pazarın benimsenmesi için uygun fiyatlı hale getiriyor. |
| Kesinlik | Orta hassasiyet, ancak daha yeni modeller daha yüksek doğruluk elde eder (örneğin, ** 0.1 °/saat **). |
| Başvuru | ** Tüketici Elektroniği **, ** Otomotiv Sistemleri **, ** Drones **, ** Robotics ** ve ** Giyilebilir ** 'da kullanılır. |
| Pazar büyümesi | ** akıllı telefonlar **, ** otomotiv güvenliği **, ** drone teknolojisi ** ve ** iot cihazları ** tarafından yönlendirilen güçlü büyüme. |
MEMS IMUS için pazar görünümü:
MEMS IMU'lar için pazarın satın alınabilirlik ve çok yönlülükleri nedeniyle büyümeye devam etmesi bekleniyor. akıllı telefonlarda , giyilebilir cihazlarda , otomotiv güvenlik sistemlerinde , drone stabilizasyonunda ve robotiklerde giderek daha fazla kullanılmaktadır . Otomotiv ve tüketici elektronik , kendi kendini süren otomobillerin ve IoT (Nesnelerin İnterneti) artan benimsenmesi ile büyümenin kilit itici güçleri olmaya devam ediyor .
2. Sis IMUS (Fiber Optik Gyroscope IMUS)
Sis IMUS, yüksek hassasiyet ve düşük sürüklenme sunar , bu da onları uzun süreli istikrar ve doğruluk gerektiren ortamlarda havacılık , savunma ve navigasyon sistemleri Sisler, açısal hızı ölçmek için fiber optik teknolojiyi kullanır ve aşırı koşullarda sağlamlıklarıyla bilinir.
| Karakteristik | Sis imu |
|---|---|
| Boyut | Yüksek hassasiyetli uygulamalar için tasarlanmış MEMS IMU'lardan daha büyük ve daha sağlam. |
| Maliyet | ** Daha yüksek maliyet **, ** Havacılık ve Uzay ** ve ** Askeri ** sektörlerinde özel uygulamalar için uygun hale getirir. |
| Kesinlik | ** Yüksek hassasiyetli ** minimal sürüklenme ile, ** uzay **, ** savunma ** ve ** navigasyon sistemlerinde ** uzun vadeli stabilite ** için idealdir. |
| Başvuru | ** Havacılık **, ** Askeri Savunma **, ** Üst düzey navigasyon sistemleri ** ve ** Hassas rehberlik sistemlerinde kullanılır **. |
| Pazar büyümesi | ** havacılık **, ** askeri ** ve ** yüksek hassasiyetli navigasyon ** sektörlerinde istikrarlı büyüme, ancak yüksek maliyetle sınırlı. |
Sis imus için pazar görünümü:
Sis IMU pazarının havacılık , askeri savunma ve yüksek hassasiyetli navigasyon istikrarlı bir şekilde büyümesi bekleniyor . Otonom araçlar , uzay araştırmaları ve füze rehberlik sistemlerine olan artan talep Sis IMUS'un benimsenmesini sağlayacaktır. Bununla birlikte, yüksek maliyet ve güç tüketimleri, özellikle düşük maliyetli tüketici uygulamalarında daha geniş piyasa penetrasyonu için sınırlayıcı faktörler olmaya devam etmektedir.
3. RLG IMUS (halka lazer jiroskop imus)
RLG IMU'lar sis imus'a benzer açısal hızı ölçmek için halka lazer jiroskopları kullanın son derece yüksek hassasiyet ile bilinir ve genellikle askeri, havacılık ve diğer yüksek performanslı sektörlerde kullanılırlar.
| Karakteristik | RLG IMU |
|---|---|
| Boyut | ** Sis Imus **, ** daha büyük ** ve daha sağlam, ** yüksek hassasiyetli uygulamalar ** için sert ortamlarda. |
| Maliyet | ** Çok yüksek maliyet **, genellikle ** havacılık ** ve ** askeri ** endüstrilerindeki premium, kritik sistemler için ayrılmıştır. |
| Kesinlik | ** Son derece yüksek hassasiyet ** ** Uzay Araç Navigasyon ** ve ** Askeri Füze Rehberliği ** Sistemlerinde sıklıkla kullanılan minimal sürüklenme ile. |
| Başvuru | ** askeri **, ** uzay aracı **, ** uydu navigasyonu ** ve diğer ** yüksek hassasiyetli savunma sistemlerinde kullanılır **. |
| Pazar büyümesi | Her ne kadar niş olsa da, ** rlg imus ** ** yüksek performanslı savunma **, ** havacılık ** ve ** uzay sistemleri ** için kritik olmaya devam ediyor. Yüksek maliyetler nedeniyle pazar mütevazı büyüme ile istikrarlıdır. |
RLG IMUS için pazar görünümü:
RLG IMU olsa da askeri savunma ve havacılık uygulamaları için, özellikle füze rehberliği ve uydu yönlendirme sistemleri gereklidir . RLG IMU'lar bu sektörlerde kritik bir rol oynamaya devam edecektir, ancak Fog IMU'lardan ve gelişmekte olan teknolojilerin rekabeti ile karşılaşabilir.
Gelecekteki eğilimler ve atalet ölçüm biriminin gelişimi
IMUS'un geleceği, sensör teknolojisindeki gelişmeler, veri işleme algoritmaları ve çeşitli endüstrilerdeki hassas sistemlere yönelik artan talebin yönlendirdiği birkaç temel gelişme ile işaretlenmektedir. İşte temel eğilimlerden bazıları:
1. diğer sensörlerle minyatürleştirme ve entegrasyon
Kompakt ve verimli sistemlere olan talep IMU'lara yönelik artan bir eğilim vardır . MEMS IMUS gelişmeye devam edecek, daha küçük, daha uygun maliyetli ve daha güçlü hale gelecek. Ek olarak, sensör füzyonu, performansı ve doğruluğu artırmak için manyetometreler , GPS ve barometreler gibi diğer sensörlerle entegre edildiği önemli bir geliştirme alanıdır
2. Daha düşük maliyetle yüksek hassasiyet
MEMS IMU son gelişmeler, daha düşük bir maliyetle yüksek hassasiyet elde etme eğilimi yönetmektedir . Guide900 ve Guide900A gibi modeller 0.1 °/saat ve 0.05 °/saat ulaşabilir ve boşluğu sis imus . Bu, MEMS IMU'ların Sis IMU'larının egemen olduğu havacılık ve askeri de dahil olmak üzere yüksek hassasiyetli kullanılacağı .
3. Otonom sistemlerde entegrasyon
, otonom araçların , dronların ve robotiklerin gelişiminin ayrılmaz bir parçasıdır . Otonom navigasyon ve hassas hareket kontrolüne artan ilgi, ileri IMU'lara olan talebi artıracaktır. AI algoritmaları ve makine öğrenimi ile entegrasyonu, sistemlerin gerçek dünya ortamlarına daha etkili bir şekilde uyum sağlamasını sağlar.
4. AI ve sensör füzyonu kullanımı
AI algoritmaları IMU veri işlemesinde giderek daha önemli bir rol oynayacaktır . IMU verilerini diğer sensör girişleriyle birleştirerek makine öğrenimi , otonom sistemler daha doğru tahminler ve ayarlamalar yapabilir. görme sistemleri , lidar ve radar gibi teknolojilerle kombinasyonunun gerçek zamanlı navigasyon ve stabilizasyonun sınırlarını zorlaması bekleniyor.
5. Geliştirilmiş dayanıklılık ve çevresel esneklik
aşırı sıcaklıklar, titreşim ve elektromanyetik parazit gibi sert koşullara sağlam ve esnek olması beklenir Sis IMUS ve MEMS IMUS, havacılık , savunma ve endüstriyel uygulamalardaki artan talebi karşılamak için gelişecek .
