Atalet sensörleri, doğaları gereği kusurludur. Önyargı kayması, rastgele yürüyüş ve termal hassasiyet anormallikler değil, beklenen davranışlardır. Önemli olan bu hataları ortadan kaldırmak değil, yönetmektir.
Yıllar içinde, güvenilir ataletsel navigasyonun yalnızca sensör özelliklerine bağlı olmadığını öğrendim; bu kusurları ne kadar iyi anlayıp telafi ettiğinize bağlı. İster MEMS ister FOG kullanın, başarı, sensör veri raporlamaya başladıktan sonra ne olduğuna bağlıdır.
Ataletsel navigasyon doğruluğu, nihayetinde sensör hatalarının ne kadar iyi modellenip telafi edildiğiyle sınırlıdır. Önyargı kaymasından rastgele yürüyüşe , etkili bir azaltma, donanım tasarımı, kalibrasyon rutinleri ve gerçek zamanlı algoritmik düzeltmenin bir kombinasyonunu gerektirir.
Ataletsel navigasyon yalnızca donanımla sınırlı değildir. Donanım performansı zemini belirler, ancak tavanı hataların ne kadar etkili yönetildiği belirler.
İçindekiler
Hata Telafisi Neden INS'deki Gerçek Darboğazdır?
Ataletsel navigasyon sistemleri genellikle aniden bozulmaz; sessizce bozulurlar . Jiroskopta küçük bir sapma ivmeölçerde hafif bir tutum, hız ve konumda büyüyen bir hataya dönüşür (INS) dakikalar içinde metre altı doğruluktan kullanılamaz hale geldiğini gördüm ; sensörlerin arızalı olmasından değil, hatanın yönetilememesinden .
IMU'nuz kağıt üzerinde ne kadar doğru olduğunu iddia ederse etsin, telafi edilmemiş bir INS her zaman sapma gösterecektir . GNSS'in yasak olduğu ortamlarda bu sapma görev açısından kritik hale gelir. Etkili telafi, bir bonus özellik değil, güvenilir bir INS'nin temelidir .
INS Hatalarını Sınıflandırma: Modelleyebilecekleriniz ve Modelleyemeyecekleriniz
Ataletsel navigasyon sistemleriyle çalışırken, ilk baktığım şeylerden biri hataların zaman içinde nasıl davrandığıdır. Bazıları öngörülebilir, bazıları ise öngörülemez. Ve bu fark, telafi söz konusu olduğunda çok önemlidir.
Sistematik hatalar: öngörülebilir ve düzeltilebilir
Bunlar düzeltilmezse zaman ve sıcaklık farklarına göre tekrarlanabilir:
- Jiroskoplarda ve ivmeölçerlerde önyargı kayması
- Ölçek faktörü doğrusal olmayanlığı
- Sensör eksenleri arasında hafif hizalama hataları
- Ortama bağlı olarak çıkışı değiştiren termal hassasiyet
Sağlam bir kalibrasyon rutiniyle, bu hatalar genellikle bir kez ölçülebilir ve koşullarınız sınırlar içinde kaldığı sürece tutarlı bir şekilde telafi edilebilir.
Rastgele hatalar: öngörülemez, ancak tanımlanabilir
Sonra, ortadan kaldırılamayan, yalnızca modellenebilen hatalar var. Bunlar arasında şunlar yer alıyor:
- Açısal rastgele yürüyüş (ARW)
- Hız Rastgele Yürüyüşü (VRW)
- Sensör beyaz gürültüsü
- Özellikle mobil platformlarda titreşim kaynaklı eserler
Özet: Sistematik hatalar laboratuvarda çözülür. Rastgele hatalarla ise sahada mücadele edilir.
INS Hataları Zaman İçinde Nasıl Yayılır?
Tazminattan bahsetmeden önce, hataların bir INS içinde nasıl davrandığını anlamak önemlidir. Hatalar sadece ortaya çıkmaz; büyür, birikir ve sistem dinamikleriyle çoğu zaman hafife alınan şekillerde etkileşime girerler. Bunun nasıl gerçekleştiğini inceleyelim.
Küçük hatalar küçük kalmaz.
Ataletsel bir navigasyon sisteminde, jiroskopta en ufak bir sapma veya mikro-g ivme hatası bile zamanla büyüyecektir. Çünkü INS, sensör verilerini entegre ederek çalışır; yani herhangi bir hata her adımda birleşir.
Entegrasyon bir çarpandır.
Yöndeki bir sapma hızı etkiler. Hızdaki bir hata ise konumu etkiler. Bu zincirleme reaksiyon, kağıt üzerinde iyi görünen özelliklere sahip bir sistemin, GNSS tarafından 30 dakika reddedildikten sonra bile yüzlerce metre sapabilmesinin nedenidir.
Hareket profili önemlidir. Hem de çok.
Sisteminizin hareket şekli, hangi hataların baskın olacağını etkileyecektir. Statik platformlarda, uzun vadeli sapma ve termal sürüklenme devreye girer. İHA'lar, füzeler veya hızlı geziciler gibi yüksek dinamik sistemlerde, ölçek faktörü doğrusal olmayanlığı ve zaman gecikmesi, sapmanın kendisinden daha kritik hale gelir.
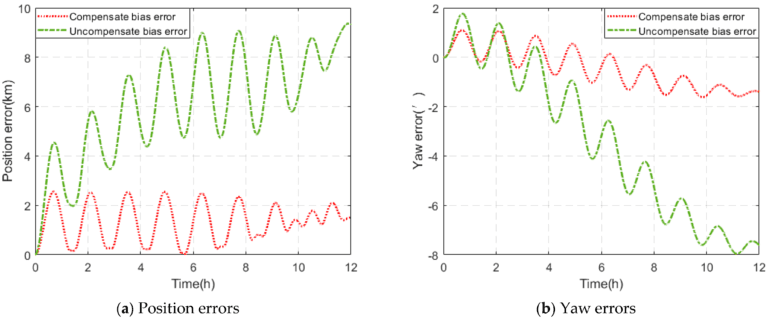
Uzun görevler her şeyi daha da büyütür.
İster 12 saatlik bir araştırma rotası, ister 2 dakikalık bir füze uçuşu olsun, INS'niz düzeltme yapmadan ne kadar uzun süre çalışırsa, hata modellemeniz o kadar önemli hale gelir.
Etkili Telafi İçin Sensör Hatalarının Modellenmesi
Bir INS'de herhangi bir şeyi düzeltebilmeniz için önce neyi düzelttiğinizi anlamanız gerekir. Bir sensörün sapması, sapması ve gürültüsü hata değil, davranıştır. Ve bunları doğru bir şekilde modellemediğiniz sürece, telafi stratejiniz sadece tahminden ibarettir.
Genellikle dört temel modelleme yöntemine güvenirim. Her biri farklı hata türlerini hedefler ve birlikte, sisteminizin yalnızca laboratuvarda değil, sahada da nasıl davranacağına dair net bir fikir verirler.
| Modelleme Yöntemi | Ana Amaç | Ele Alınan Hata Türleri | Neden Önemli? |
|---|---|---|---|
| Allan Varyansı | Sensör gürültüsünün zaman içinde nasıl geliştiğini analiz edin | ARW, önyargı istikrarsızlığı, rastgele kayma | Filtre ayarı ve sensör derecelendirmesi için gereklidir |
| Altı Pozisyonlu Kalibrasyon | Sabit önyargıları ve uyumsuzlukları tahmin edin | Önyargı, ölçek faktörü, eksen hizasızlığı | Statik hataların doğru bir şekilde giderilmesini sağlar |
| Termal Kalibrasyon | Sıcaklıklara göre harita çıktı değişimi | Sıcaklık kaynaklı önyargı ve kazanç kayması | Gerçek dünyadaki açık hava ve mobil platformlar için kritik |
| PSD Analizi | Frekansa göre sensör gürültüsünü anlayın | Beyaz gürültü, düşük frekanslı gezinme | Gerçek hareketi bastırmadan filtre tasarımını bilgilendirir |
İpucu: GNSS'in reddettiği veya uzun süreli herhangi bir görevde INS'nize güvenmeden önce bu yöntemlerden en az üçünü birleştirin.
Donanım Tabanlı Hata Azaltma Teknikleri
İyi bir yazılım, kötü bir donanımı kurtaramaz. Ataletsel navigasyon sistemlerinde mekanik, termal ve elektriksel tasarım seçimleri, uzun vadeli istikrarı doğrudan etkiler . Bunlar, sağlam INS platformları inşa etmek için güvendiğim temel tekniklerdir.
- Titreşim izolasyonu esastır.
Filtrelenmemiş mekanik titreşimler, yanlış hareket sinyalleri oluşturur. Ayarlanmış izolatörler veya uygun şekilde sönümlenmiş sensör montajları kullanmak, özellikle paletli araçlarda veya rotorlu hava taşıtlarında yüksek frekanslı gürültüyü önemli ölçüde azaltabilir.
- Termal tutarlılık kalibrasyonunuzun geçerliliğini korur.
Sensör çıkışı sıcaklığa bağlı olarak değişir. Pasif yalıtım veya aktif ısıtma, çalışma sıcaklığının kalibre ettiğiniz aralıkta kalmasına yardımcı olabilir.
- Güç gürültüsü sinyal gürültüsüne dönüşür.
Gerilim dalgalanmaları ve EMI, analog ve dijital sinyallerde ince ve kalıcı bozulmalara neden olur. Ben her zaman temiz güç hatları, düşük gürültülü regülatörler ve sıkı analog/dijital ayrımı kullanırım.
- Montaj hassasiyeti hizalamayı etkiler.
En ufak mekanik kaymalar bile duruş ve hızda önemli hatalara yol açabilir. Sağlam, işlenmiş braketler kullanın ve IMU yönünü ve torkunu dikkatlice kontrol edin.
- Göreve uygun sensörleri kullanın.
Sadece "en iyi" sensörü seçmekle kalmayın; hata bütçenize uygun olanı seçin. Uzun GNSS kesintileri için, önyargı kararlılığı en önemli unsurdur. Hızlı platformlar için düşük ARW ve bant genişliği önceliklidir.
Sonuç olarak: En iyi atalet performansı, veri toplamadan çok önce başlar; sensörün çerçeveye nasıl bağlandığıyla başlar.
Yazılım Tabanlı Tazminat Teknikleri
Donanım kararlı hale geldiğinde, yazılım devreye girer. Kayma kontrolünün büyük kısmı burada gerçekleşir ve iyi bir modelin, mütevazı bir sensörün harika bir sensör gibi performans göstermesini sağlayabileceği yer burasıdır. Pratikte yaklaşımım şu şekilde:
- Doğru kalibrasyonla başlayın.
Sapmayı, ölçek faktörünü, hizalama hatasını ve sıcaklık tepkisini ölçmek için statik ve dinamik prosedürleri kullanın. İyi bir kalibrasyon temel çizgisi olmadan, geri kalan her şey tahminden ibarettir.
- Dinamiklerinize uygun filtreler kullanın.
Genişletilmiş Kalman Filtreleri (EKF), Kokusuz Kalman Filtreleri (UKF) veya tamamlayıcı filtreler; hareket profilinize ve mevcut destek kaynaklarınıza göre seçim yapın. Yanlış filtre yapısı, hiç filtre olmamasından daha kötüdür.
- Sıcaklık telafisi pazarlığa tabi değildir.
İster FOG ister MEMS IMU kullanın, sensör davranışı sıcaklıkla birlikte değişir. Dahili veya harici sıcaklık sensörleri kullanılarak yapılan gerçek zamanlı düzeltme, sapmayı bir kat daha azaltabilir.
- Uyarlanabilir filtreleme hayatta kalmayı artırır.
Çok aşamalı görevlerde (örneğin fırlatma, seyir, iniş) sensör gürültüsü özellikleri değişir. Hız, titreşim veya çevresel verilere dayalı adaptif filtre ayarı, sisteminizin ihtiyaç duyduğu şekilde ayarlanmasını sağlar.
- Kapalı devre düzeltme, her şeyi sınırlı tutar.
Hata artışını sınırlamak için GNSS, odometri, barometre veya manyetometre güncellemelerini kullanın. Birkaç saniyede bir düşük oranlı bir düzeltme bile uzun süreli görevlerde performansı önemli ölçüde artırır.
En önemlisi: Yazılım doğruluğu icat edemez; ancak onu koruyabilir , geliştirebilir ve işler ters gittiğinde geri kazanabilir. İyi bir INS'nin yapması gereken de tam olarak budur.
INS Kaymasını Bastırmada Sensör Füzyonunun Rolü
En iyi ataletsel navigasyon sistemi bile kayacaktır; bu bir kusur değil, fiziktir . Asıl soru, bu kaymayı diğer sensörler kullanarak nasıl sınırlayacağımızdır. Sensör füzyonunun sistemdeki en güçlü araç haline geldiği yer burasıdır.
GNSS + INS: Klasik çözüm
GNSS mevcut olduğunda, aralıklı da olsa, INS kaymasını sınırlamak için mutlak konum güncellemeleri sağlar.
En iyi kullanım alanı: Uzun süreli görevler, mobil haritalama, İHA'lar
Avantaj: doğru düzeltmeler, olgun filtreler (EKF)
Uyarı: parazitlenmeye, sinyal kaybına ve çoklu yola karşı savunmasızdır
FOG + MEMS Hibrit: Hassasiyet ve maliyetin dengelenmesi
Kararlı bir FOG'u duyarlı MEMS ile birleştirmek size her iki dünyanın da en iyisini sunar: düşük kayma ve hızlı tepki.
En iyisi: orta boy İHA'lar, deniz platformları, robotik sistemler
Avantaj: daha iyi ARW + daha düşük SWaP
Uyarı: dikkatli entegrasyon ve çapraz kalibrasyon gerektirir
Görüntü / LiDAR + INS: GNSS'siz süreklilik
GNSS'in mevcut olmadığı iç mekanlarda veya yer altında görsel odometri veya LiDAR SLAM, göreceli pozisyon verileri sağlayabilir.
En iyisi: otonom araçlar, tüneller, depolar, madenler
Avantaj: tamamen kendi kendine yeten
Uyarı: Görüş hattı gereklidir, ışığa veya özellik yoğunluğuna duyarlıdır
Zamanlama her şeydir. Füzyon yalnızca sensörleriniz senkronize olduğunda çalışır. Yanlış hizalanmış zaman damgaları faydadan çok zarara yol açar.
Uygulamada: Füzyon daha fazla sensör eklemekle ilgili değil; doğru zamanda hangisine güveneceğinizi bilmekle ilgilidir.
GuideNav'ın INS Güvenilirliğine Yaklaşımı
Sahada gördüğüm her şeyden sonra -İHA'lar, araştırma araçları, deniz sistemleri- bir şey kesinlikle aynı: Bir INS'nin gerçek performansı sensörün etrafındaki her şeyden gelir .
GuideNav'da tam da bu konuya odaklanıyoruz.
- Her ünite sadece parti halinde test edilmekle kalmıyor, aynı zamanda sıcaklık ve eksenler boyunca tam olarak kalibre ediliyor
- Gerçek Allan varyans verileri sağlıyoruz ; sadece teknik özellik sayfaları değil.
- FOG ve MEMS modellerimiz, sahada kullanıma hazır entegrasyon araçlarıyla : kararlı zamanlama, temiz arayüzler ve füzyon desteği.
- ITAR'dan muaf olduğumuz için sistemlerimiz savunma, endüstriyel veya araştırma programlarında küresel dağıtıma hazırdır.
Sadece bir sensör almıyorsunuz; diğer sistemler devre dışı kaldığında güvenebileceğiniz bir navigasyon platformuna da sahip oluyorsunuz.