1. Bölüm'de , ARW'nin ne olduğunu ve herhangi bir IMU tabanlı sistemin güvenilirliğini neden sessizce yönettiğini ele aldık. Ancak ARW'nin nasıl çalıştığını bilmek, ancak onu temel alarak tasarım yapabiliyorsanız değerlidir. Bu ikinci bölüm pratik tarafa odaklanıyor: ARW'nin gerçek İHA navigasyonunu nasıl etkilediği, yazılımların neler yapıp yapamayacağı ve arıza söz konusu olmadığında sensörleri nasıl değerlendirdiğim.
Açısal Rastgele Yürüyüş (ARW), IMU doğruluğunun nihai sınırını belirler . Bu sınır, yazılımla ortadan kaldırılamaz; yalnızca düşük gürültülü sensör seçimi, kararlı termal tasarım, titreşim izolasyonu ve etkili çoklu sensör birleştirme stratejileriyle azaltılabilir.
İşte bu nedenle bu bölümde, ARW'nin gerçek dünyadaki İHA operasyonlarında nasıl ortaya çıktığını, yazılımın tek başına bunu neden iptal edemeyeceğini ve sensör seçimi, termal yönetim, mekanik izolasyon ve füzyon gibi hangi pratik tasarım seçimlerinin görev başarısı ile başarısızlığı arasındaki farkı yaratabileceğini anlatacağım.
İçindekiler
ARW İHA Navigasyonunu Nasıl Etkiler?
Şunu hayal edin: Sabit kanatlı bir İHA'yı sıfır GNSS sinyaliyle bir kanyonda uçuruyorsunuz. Otopilot, konumu korumak ve uçuş rotasını sabit tutmak için tamamen IMU'nuza güveniyor. İlk birkaç dakika boyunca her şey sağlam görünüyor. Ama sonra yönelim kaymaya başlıyor; önce yavaş, sonra hızlanıyor. İHA yön değiştirmeye başlıyor, irtifa tutma özelliği kayboluyor ve referans noktanızı kaybediyorsunuz. Ne oldu?
İşte ARW'nin aksiyon hali. Hiçbir hareket, termal gradyan ve titreşim olmasa bile, entegre açısal gürültü, eğim, yuvarlanma ve yön konusundaki güveninizi sessizce azaltıyor . ARW kaynaklı kayma, uçuş kontrol eşiklerinizi aştığında, hiçbir PID ayarı veya düzeltmesi platformu kurtaramaz.
Kendi İHA tasarımlarımda, ARW'yi navigasyon süresi bütçesi . 0,2°/√h hızında bir MEMS jiroskopu, GNSS'in yasak olduğu bir bölgede 10-15 dakikalık kullanılabilir stabilite sağlayabilir. 0,05°/√h hızında taktik bir MEMS bu süreyi uzatır. FOG size saatler kazandırır. Aradaki fark sadece performans değil; görevin gerçekleşip gerçekleşemeyeceğidir .
ARW Yazılımda Telafi Edilebilir mi?
Çok sık karşılaştığım bir tuzak bu: Bir ekip yönelim kaymasıyla karşılaşıyor ve bunun donanım yazılımıyla düzeltilebileceğini varsayıyor. Daha fazla filtreleme ekliyor, Kalman kazanç ayarını artırıyor veya sensör füzyon katmanlarını üst üste koyuyorlar; ancak kayma ortadan kalkmıyor . Çünkü mücadele ettikleri şey bir kodlama hatası veya füzyon yanlış yapılandırması değil; fizik.
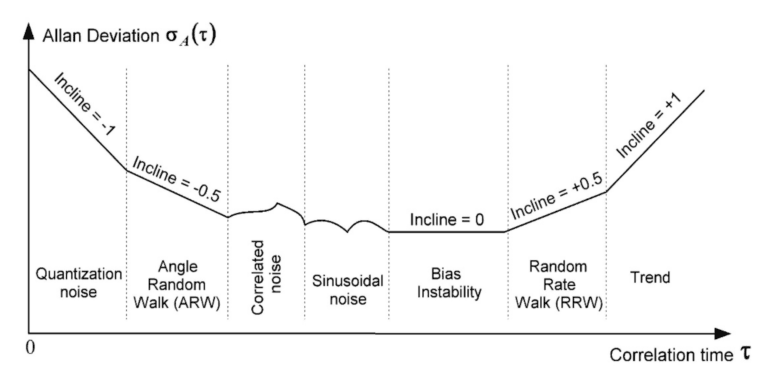
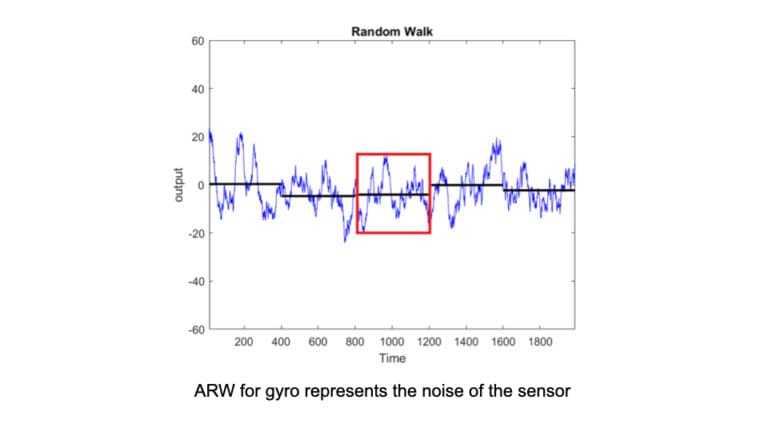
ARW bir sapma veya ofset değildir; indirgenemez bir gürültüdür. Zamanla yerleşmez ve yavaş bir termal kayma gibi ortalamaya düşmez. Her jiroskop çıkışının en altında yer alır ve ikinci jiroskop çıkışından itibaren entegrasyonunuz için belirsizlik yaratır.
Evet, füzyon yardımcı olur. GNSS güncellemeleri yön kaymasını sıfırlayabilir. Görüş sistemleri veya LiDAR, pozisyonu sabitleyebilir. Ancak bunlar ortadan kalktığında (örneğin bir tünelde veya parazit altında), sisteminiz ham IMU'ya geri döner ve o anda ARW, geri sayım saati haline gelir. Sensörün iç gürültüsü çok yüksekse, hiçbir yazılım hilesi sizi kurtaramaz.
Ekiplere şunu söylüyorum: ARW'nin etkilerini filtreleyebilirsiniz, ancak silemezsiniz. Platformunuzun birkaç dakikadan uzun süre harici bir düzeltme olmadan uçması, nişan alması veya dengelenmesi gerekiyorsa, jiroskopunuzu bunu göz önünde bulundurarak seçin veya başarısızlığa göre tasarlayın.
Mühendisler Sistem Tasarımında ARW'yi Nasıl En Aza İndirir?
ARW'yi ortadan kaldıramazsınız, ancak akıllıca tasarlayabilirsiniz . Güvenilir atalet performansıyla teslim ettiğim her sistem şu soruyla başladı: "ARW'imin ne kadar düşük olması gerekiyor ve bu seviyeye ulaşmanın en akıllı yolu nedir?" İşte yaklaşımım:
- Sensör seçimi her şeyden önce gelir. ARW bütçeniz kısıtlıysa, hiçbir algoritma ucuz bir MEMS jiroskopundan tasarruf sağlamaz. Hacminize, gücünüze ve bütçenize uygun en düşük ARW değerine sahip cihazla başlayın. Deneyimlerime göre, bu karar tek başına sistem kalitesinin %80'ini belirler.
- Termal kararlılık, insanların düşündüğünden daha önemlidir. İyi tasarlanmış bir jiroskop, sıcaklıkla birlikte artan gürültüden muzdarip olabilir. Zayıf termal izolasyonda ARW değerlerinin iki katına çıktığını gördüm. Kararlı bir termal kütle veya hafif aktif kontrol gerçekten fark yaratır.
- Mekanik izolasyon, etkin gürültüyü azaltır. Titreşim, sensörün sinyal yoluna geniş bant enerjisi gönderir ve bu enerjinin bir kısmı açısal hareket olarak yorumlanır. Yumuşak montajlar veya ayarlanmış izolatörler ARW'yi düşürmez; ancak sistemin ARW olarak algıladığı
- Sensör füzyonu zaman ufkunuzu genişletir. GNSS, manyetometreler, barometreler, görsel odometri... hepsi işe yarar, ancak yalnızca kendi belirsizlikleri iyi yönetilirse. Füzyonu kötü IMU'lar için bir yama olarak değil, iyi olanlar için bir çarpan .
Temel fikir nedir? ARW zemini tanımlar. Diğer her şey ondan oluşur. Sensörünüz özünde gürültülüyse, üstteki her katman (filtreler, tahminciler, füzyon) bu belirsizliği devralacaktır.
ARW'ye Duyarlı Bir Uygulamada Nelere Dikkat Etmelisiniz?
Görev açısından kritik bir platform için IMU seçerken, sadece bir özellik seçmekle kalmıyor, aynı zamanda bir arıza zaman çizelgesi de seçiyorsunuz. ARW, sisteminizin belirsizlik devreye girmeden önce harici bir düzeltme olmadan ne kadar süre uçabileceğini, yön değiştirebileceğini, nişan alabileceğini veya dengede kalabileceğini gösterir. Bu yüzden ARW'yi IMU seçiminde belirleyici değişken
Bunu şöyle çerçeveliyorum:
- GNSS düşüş pencereniz 5 dakikadan kısaysa ve yalnızca kaba bir yönlendirmeye ihtiyacınız varsa, endüstriyel MEMS (0,1–0,5°/√h) işe yarayabilir. Filtrenizin tüm süre boyunca kaymaya karşı direnç göstermesini bekleyin.
- platformunuzun 10-20 dakika boyunca sabit kalması gerekiyorsa , 0,05°/√h aralığında ARW'ye sahip taktik MEMS'ler minimum giriş noktanızdır. Burada asla tüketici sınıfı sensörler kullanmıyorum; istisnasız.
- Saatlik güvene ihtiyacınız varsa (deniz navigasyonu, demiryolu sistemleri, hava silahları), FOG artık bir seçenek değil. 0,01°/√h'nin altında bir ARW'ye ve daha da önemlisi, FOG mimarisinin sağladığı tutarlılığa ve çevresel dayanıklılığa ihtiyacınız olacak.
Yaptığım her tasarım incelemesinde şunu soruyorum: "Dış referanslar düştüğünde ne olur?" Cevap "yavaş ve öngörülebilir bir şekilde bozuluruz" ise, ARW işini yapıyor demektir. Cevap "3 dakikadan kısa sürede kayboluruz" ise, yanlış IMU'yu seçmişsiniz demektir.
Doğru IMU'yu Seçmek İçin ARW Ölçütü
Açı Rastgele Yürüyüşü, bir veri sayfasında gizlenmiş bir sayı değil; bir IMU'nun kritik görev uygulamalarında güvenilir olup olmadığını belirleyen bir ölçüttür. Savunma, havacılık ve denizcilik alanlarındaki mühendisler, düşük ARW'nin dakikalar içinde değişen sistemler ile saatlerce hatta günlerce kararlı kalan sistemler arasındaki fark olduğunu bilirler.
GuideNav olarak , tam da bu ölçüte odaklanıyoruz. IMU'larımız ve FOG tabanlı navigasyon sistemlerimiz, sektör lideri ARW performansıyla tasarlanarak GNSS'in engellendiği ortamlarda, uzun ömürlü İHA'larda ve hassas stabilizasyon platformlarında doğruluk sağlar. İster taktik MEMS'in kompakt verimliliğine, ister navigasyon sınıfı FOG'un sağlam stabilitesine ihtiyacınız olsun, GuideNav görev başarısının gerekliliklerine göre uyarlanmış çözümler sunar.
