В моей работе, разработанной навигационными системами, я обнаружил, что истинная надежность возникает от независимости, а не от зависимости от внешних сигналов. Вот почему инерциальные навигационные системы (INS) играют такую критическую роль: они полностью работают на внутренних измерениях, обеспечивая постоянную и непрерывную навигацию в широком спектре среды, от автономных транспортных средств до аэрокосмических платформ.
Система инерциальной навигации (INS) определяет положение, скорость и ориентацию положения, используя только внутренние датчики движения, обеспечивая точную навигацию в широком спектре применений, включая автономные системы, подводные платформы и критически важную защиту.
Прежде чем выбрать INS для вашего приложения, это помогает создать четкое понимание его рабочих принципов и типов систем.
Оглавление

Что такое инерциальная навигационная система (INS)?
Инерционная навигационная система (INS)-это автономная система, которая использует внутренние датчики движения-типично ускоряющие и гироскопы-для постоянного расчета положения, скорости и ориентации платформы в трехмерном пространстве. Поскольку он не полагается на какие-либо внешние ссылки, INS особенно ценен в средах, где требуется последовательная непрерывная навигация, включая подводные, подземные и высокие приложения защиты.
Каковы основные компоненты INS?
По моему опыту разработки решений INS, каждая система начинается с трех важных компонентов: гироскопов, акселерометров и навигационного процессора. Чтобы повысить точность и стабильность, мы часто интегрируем дополнительные датчики - такие как приемники GNSS, магнитометры или барометрические альтимеметры - для расширенного слияния датчиков. Эта архитектура позволяет INS сохранять надежное отслеживание движения в различных и сложных условиях.

Гироскопы
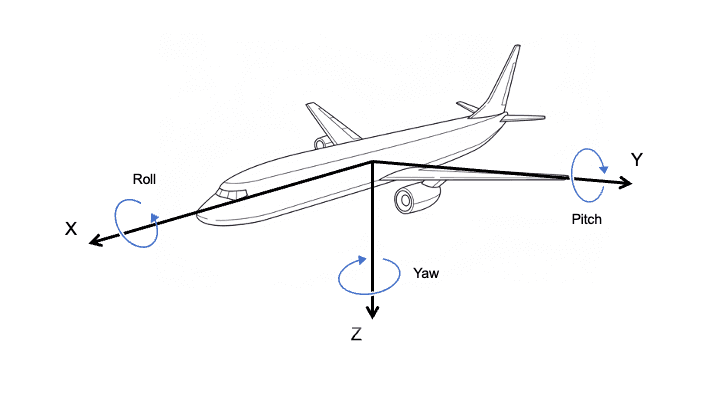
Гироскопы измеряют угловую скорость вдоль трех ортогональных оси (x, y, z), обеспечивая необходимые данные для ориентации вычислений - Roll, Pitch и Yaw. Гироскопы MEMS широко используются для компактных применений, в то время как FOG (волоконно-оптические гироскопы) и RLG (кольцевые лазерные гироскопы) обеспечивают более высокую точность и долгосрочную стабильность для систем тактических и аэрокосмических качеств.
Акселерометры
Акселерометры измеряют линейное ускорение вдоль каждой оси. При интеграции со временем эти значения дают изменения в скорости и смещении. Высокопроизводительные акселерометры с низкой нестабильностью смещения и низким шумом имеют решающее значение для поддержания точности положения с течением времени.
Инерциальный навигационный процессор
Процессор служит вычислительным ядром INS. Он сливает вход от датчиков движения, применяет алгоритмы компенсации и фильтрацию, а также выходы, скорость и ориентация в режиме реального времени. Многие системы также поддерживают интеграцию внешнего датчика и диагностику в реальном времени в этом блоке.
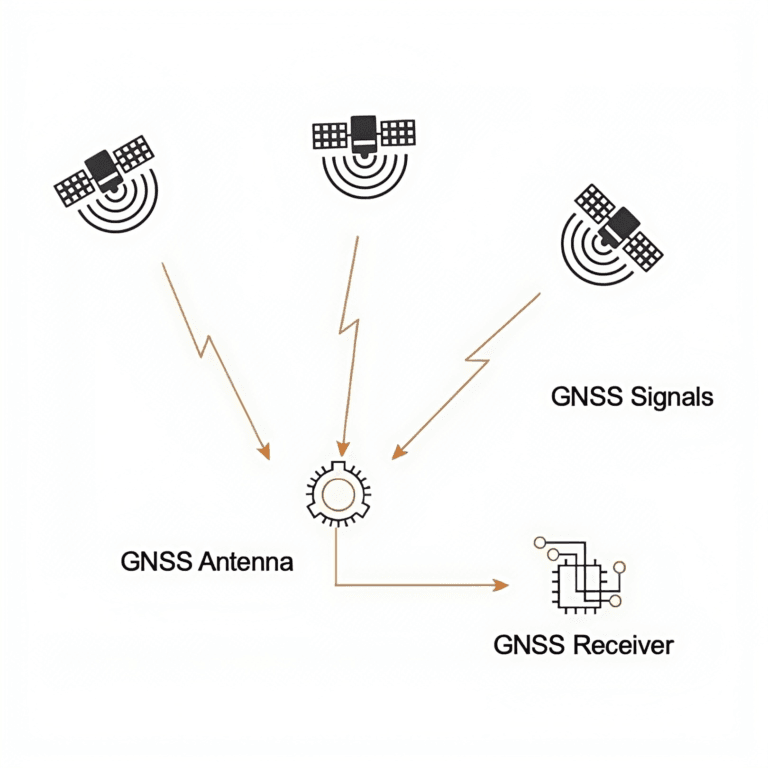
GNSS -приемники
Растущее число решений INS в настоящее время интегрирует приемники GNSS для повышения долгосрочной точности и глобального позиционирования. Объединяя инерционные измерения со спутниковыми данными-типично через расширенную фильтрацию Калмана-эти гибридные системы эффективно исправляют дрейф и обеспечивают надежные характеристики навигации на автономных платформах, аэрокосмических системах и приложениях геодетического класса.
Магнитометры
Магнитометры помогают в определении заголовка путем измерения магнитного поля Земли. Несмотря на то, что они менее точные, чем гироскопические растворы, они обеспечивают полезную абсолютную ссылку, особенно в приложениях с низким динамическим или в помещении.
Барометрические альтимеметры
Эти датчики обеспечивают оценку высоты на основе атмосферного давления. Они обычно используются в беспилотниках, самолетах и наземных системах, которые требуют вертикальных эталонных данных в средах, где высота GNSS может быть ненадежной.
Вместе эти компоненты образуют универсальную навигационную систему, способную предоставлять высококачественные данные движения в реальном времени, независимо от того, действует ли чистая инерционная единица или как часть тесно интегрированного решения GNSS/INS, предназначенного для сложных динамических сред.
Каковы различные типы INS: MEMS, FOG и RLG?
Инерционные навигационные системы могут быть в целом классифицированы на основе типа технологии гироскопа, которую они используют. Выбор технологии определяет ключевые характеристики производительности, такие как стабильность смещения, шум, дрейф и стоимость, что делает его критическим, чтобы выбрать правильный тип для вашего приложения.
1. MEMS INS (микроэлектромеханические системы)
MEMS INS создан с использованием микромеханических гироскопов и акселерометров на основе кремния. Благодаря достижениям в полупроводнике эти системы в настоящее время широко используются в компактных платформах, где размер, вес, мощность и стоимость (SWAP-C) являются основными ограничениями.



2. Fog Ins (волоконно-оптические гироскопные INS)
Fog INS полагается на эффект SAGNAC, используя спиральную оптоволоконную оптику для измерения вращения. Он обеспечивает значительно более высокую стабильность, более низкую дрейф и более высокую линейность фактора масштаба, чем системы MEMS, что делает его идеальным для навигации тактического класса.


3. rlg ins (кольцевой лазер-гироскоп INS)
RLG INS использует лазерные помехи в полости с закрытой контукой для обнаружения угловой скорости с чрезвычайно высокой точностью. Эта архитектура обеспечивает точность стратегического уровня и обычно развернута в системах, где абсолютная инерционная производительность имеет решающее значение.
| INS Тип | Преимущества | Ограничения | Типичные варианты использования |
|---|---|---|---|
| МЭМС ИНС |
|
| Беспилотники, робототехника, носимые системы, смешивающие боеприпасы |
| ТУМАН ИНС |
|
| Аэрокосмические платформы, защитные транспортные средства, морские системы |
| Rlg ins |
|
| Баллистические ракеты, космический корабль, высококачественные самолеты |
Как работает INS?
При настройке INS я всегда начинаю с определения его начальной позиции, скорости и ориентации. Оттуда система опирается исключительно на инерционные измерения, чтобы оценить каждое последующее состояние движения в режиме реального времени.
1. Измерение ускорения
Система использует триасиальные акселерометры для измерения линейного ускорения в трех направлениях. Эти значения интегрируются с течением времени для вычисления скорости, а затем снова интегрируются для расчета изменений в положении.
2. Измерение угловой скорости
Гироскопы измеряют угловую скорость вдоль оси x, y и z. Эти показания используются для обновления ориентации системы с помощью кватерниона или интеграции угла Euler.
3. Принцип мертвого расплаты
INS работает через мертвую расчет, то есть оценивает текущее состояние, основанное на предыдущем и входе датчика. Это позволяет ему ориентироваться без внешних ссылок, таких как GNSS.
4. Накопление ошибок и дрейф
Поскольку он интегрирует данные о шумных датчиках, небольшие смещения и ошибки (например, нестабильность смещения, ошибка масштаба коэффициента) накапливается с течением времени, что приводит к дрейфу как в положении, так и в ориентации.
5. слияние датчика и входные данные
Чтобы свести к минимуму дрейф, INS часто объединяется с внешними датчиками, такими как GNSS, допплеровские логики скорости (DVL), барометры или магнитометры. Эти источники помогают правильные накопленные ошибки и расширяют точность эксплуатации.
Эта архитектура позволяет INS обеспечить автономную навигацию в среде в средах, где внешние сигналы ограничены, нарушены или совершенно недоступны-например, во время высокой динамики или электромагнитных помех.
Какие показатели производительности определяют качество INS?
При выборе системы инерционной навигации понимание ее основных параметров производительности имеет важное значение для обеспечения ее соответствия требованиям миссии. Следующие метрики наиболее важны:
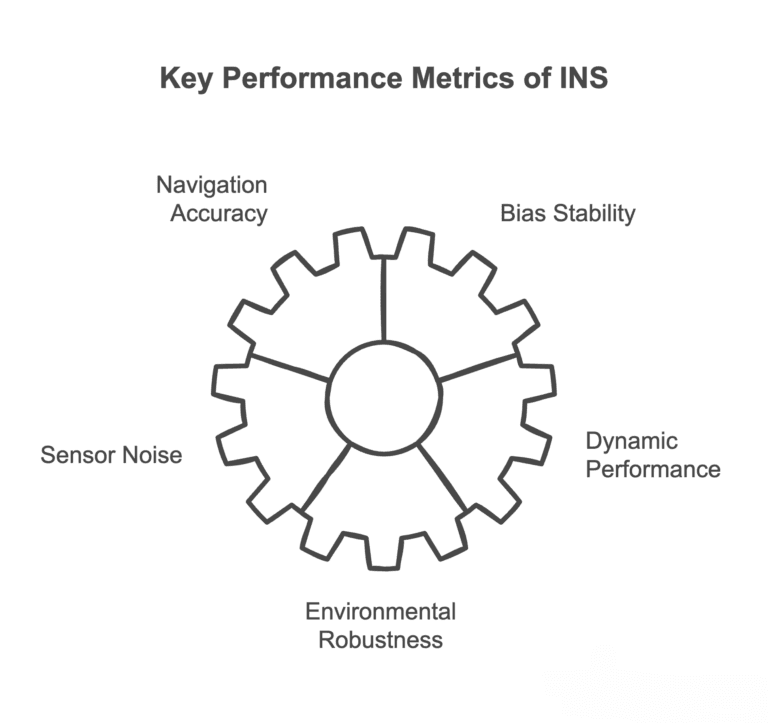
1. Точность навигации
Точность включает в себя положения, скорость и ошибки отношения, которые накапливаются с течением времени. Высокая точность имеет решающее значение для операций в средах, вызванных GNSS. Например, Guidenav GFS120A предлагает точность заголовка 0,01 ° (1σ) , точность рулона/шага 0,005 ° (1σ) и позиционирование уровня RTK <2 см + 1 ч/млн , с ошибкой скорости до 0,02 м/с .
2. Смешание предвзятости
Стабильность смещения отражает долгосрочный дрейф гироскопов и акселерометров, что непосредственно влияет на выносливость навигации. Guidenav GFS120A обладает стабильностью смещения гиропазона 0,003 °/ч и устойчивости ускоряния ускоряет при 20 мкг , что делает его подходящим для высокопроизводительных и долгосрочных автономных применений.
3. Датчик шум (случайная прогулка)
Случайная прогулка количественно определяет краткосрочный шум датчика. Нижние значения ARW и VRW указывают на более чистые, более стабильные данные во время движения.
4. Динамическая производительность
Скорость обновления, задержки и пропускной способности определяют, насколько быстро INS реагирует на движение. Высокая динамическая производительность имеет решающее значение для беспилотных летательных аппаратов, робототехники и ракет.
5. Экологическая надежность
INS должен выдерживать вибрацию, шок и температуры. Соответствие стандартам MIL-STD или DO-160 обеспечивает надежность в суровых условиях.
Понимание и сравнение этих показателей позволяет интеграторам выбирать соответствующие INS для своей платформы, сбалансировать затраты, точность и экологические требования.
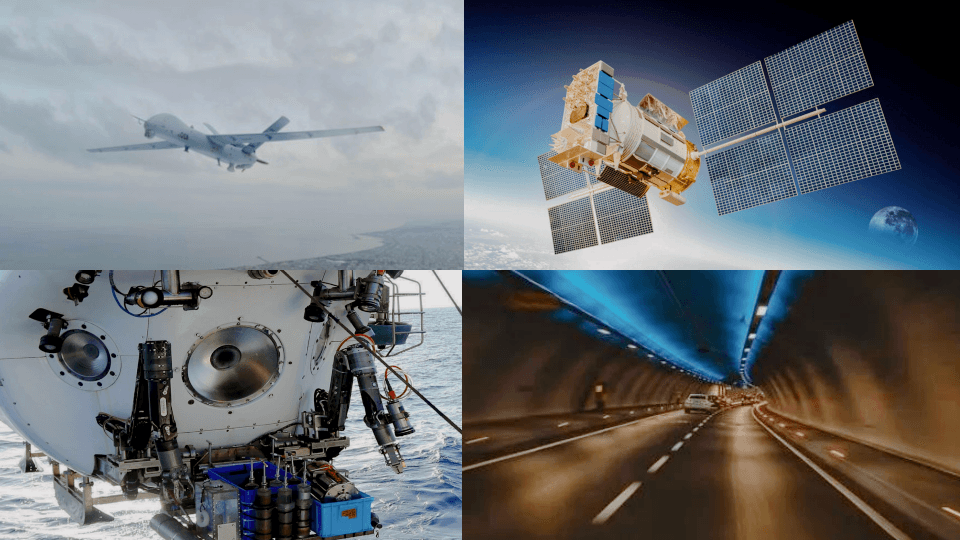
Каковы типичные применения INS в разных отраслях?
Инерционные навигационные системы (INS) широко используются в аэрокосмической, морской, оборонной, беспилотной системах, промышленной автоматизации и подземной промышленности, где непрерывная, независимая от сигнала навигация имеет решающее значение. В аэрокосмической промышленности они обеспечивают точное руководство по самолетам и ракетам; В морских приложениях они поддерживают подводные лодки и AUV, где GNSS недоступен. Системы защиты полагаются на INS для таргетинга, управления огнем и навигации в средах, вызванных GPS. Беспилотные платформы, такие как беспилотники, UGV и UUV, используют INS для позиционирования в реальном времени и слияния датчика. В промышленной робототехнике INS обеспечивает точное управление движением для AGV и кранов. В добыче и туннелировании INS позволяет надежное расположение подземных для тяжелых машин и буровых систем.
Как Guidenav ведет в индустрии инерционной навигации?
Благодаря 15 с лишним лет опыта, Guidenav обеспечивает высокопроизводительные решения инерционных навигации, доверяемые интеграторами обороны, аэрокосмической и автономной системы по всему миру.
Разнообразные продукты
От компактных MEMS для беспилотных летательных аппаратов до высоких туманных туманов для морской и аэрокосмической промышленности, Guidenav охватывает полный спектр профилей миссий.
Оптимизирован для Swap-C
Все системы создаются для размера, веса, мощности и экономической эффективности - хотя для мобильных, встроенных и тактических платформ.
Гибридная интеграция готова
Наши платформы INS поддерживают бесшовное слияние с GNSS, DVL и другими датчиками помощи через стандартные интерфейсы (UART, CAN, Ethernet).
Прочный и проверенный на поле
Разработанные для встречи с MIL-STD-810H, подразделения Guidenav являются устойчивыми к шоковым, устойчивым к вибрации и надежно работают в суровых условиях.
Guidenav является предпочтительным партнером для интеграторов, стремящихся к расширенным инерционным навигационным системам (INS), которые сочетают в себе высокую точность, операционную надежность и полное соответствие экспорта для требовательной защиты, аэрокосмической и автономной применения.