Подземные и подводные трубопроводы сложно инспектировать, поскольку сигналы GPS, свет и магнитные поля исчезают внутри. Традиционные датчики, такие как камеры и энкодеры, теряют точность на скользких или изогнутых поверхностях, что делает локализацию дефектов ненадёжной. В условиях отсутствия ГНСС инерциальные измерительные блоки (IMU) на основе МЭМС обеспечивают автономное навигационное решение. Компактные, маломощные и устойчивые к вибрации, эти инерциальные датчики на основе МЭМС позволяют роботам для осмотра трубопроводов сохранять стабильную ориентацию, точно измерять движение и точно картировать дефекты — даже на глубине сотен метров под поверхностью.
Инерциальные измерительные блоки (ИМБ) на основе МЭМС обеспечивают точную инерциальную навигацию для роботов-инспекторов трубопроводов, работающих в условиях отсутствия ГНСС. Предоставляя стабильные данные о положении, скорости и местоположении, они обеспечивают надежное картирование дефектов, плавное управление траекторией и непрерывную работу в закрытых подземных или подводных трубопроводах.
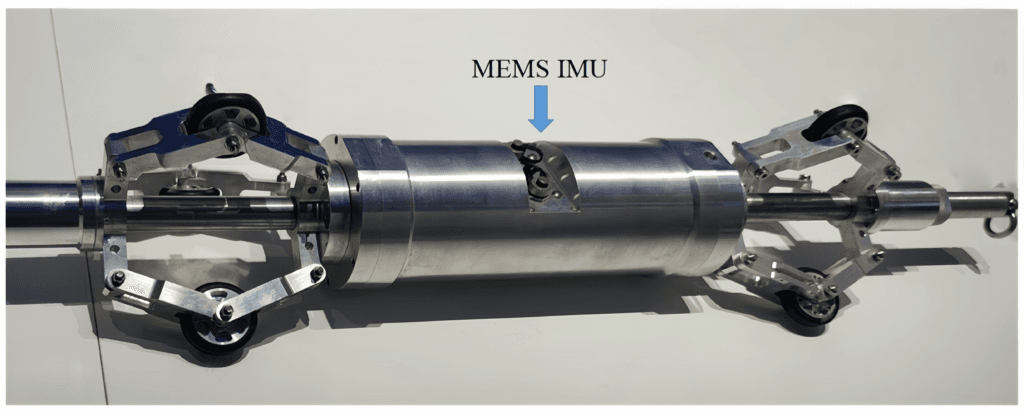
Внутри трубопровода, где ГНСС и визуальные сигналы исчезают, навигация полностью зависит от инерциальных измерительных блоков MEMS. Эти компактные инерциальные датчики регистрируют угловую скорость и ускорение для построения непрерывного профиля движения. Для робота, проверяющего трубопровод, точная инерциальная навигация означает точное определение его местоположения, положения и скорости — основу для надёжного обнаружения и картирования дефектов.
Оглавление
Проблема навигации внутри трубопроводов, где запрещена GNSS-связь
Для робота, проверяющего трубопроводы , навигация — самая сложная задача. Глубоко внутри металлических трубопроводов сигналы ГНСС полностью блокируются , и даже магнитные датчики теряют надёжность. Единственный способ поддерживать точное отслеживание движения — это инерциальная навигация с использованием инерциального блока MEMS (IMU) . Непрерывно измеряя угловую скорость и линейное ускорение, инерциальный измерительный блок (IMU) помогает роботу вычислять свою ориентацию, скорость и положение в режиме реального времени. Любая нестабильность смещения или дрейф интегрирования могут привести к серьёзным ошибкам картирования, поэтому высокопроизводительные инерциальные измерительные блоки GuideNav MEMS необходимы для точной подземной инспекции в условиях отсутствия ГНСС .

Почему технология MEMS IMU идеально подходит для роботов, проверяющих трубопроводы
Компактный. Прочный. Точный.
Внутри узкого стального трубопровода важен каждый миллиметр и каждый ватт.
Вот тут-то и MEMS IMU .
- Компактный и легкий: роботы для осмотра трубопроводов малого диаметра в условиях ограниченного пространства.
- Низкое энергопотребление и эффективность: поддерживает длительные миссии без перегрузки энергосистем.
- Устойчивость к вибрации: обеспечивает стабильную инерциальную навигацию даже при среднеквадратичной вибрации 20 g.
- Устойчив к температурам: надежно работает при температуре от –40 °C до +85 °C.
В отличие от громоздких устройств FOG, инерциальная система на базе MEMS обеспечивает высокоточные данные о движении в миниатюрном форм-факторе — идеально подходит для подземных условий, где отсутствует GNSS .
От необработанных данных о движении до точного отображения местоположения
На трубопроводе, на котором отсутствует ГНСС , каждое движение робота, проверяющего трубопровод, должно измеряться самостоятельно.
Инерциальный измерительный блок MEMS преобразует необработанные сигналы движения в содержательные инерциальной навигации с помощью точного вычислительного процесса:
Шаг 1. Обнаружение движения
Высококачественные МЭМС-гироскопы измеряют угловую скорость, а МЭМС-акселерометры обнаруживают линейное ускорение.
Вместе они образуют основу внутреннего движения робота.
Шаг 2. Интеграция и вычисления
Бортовой процессор интегрирует данные инерциального измерительного блока для оценки положения , скорости и местоположения в режиме реального времени.
Это основа навигационного счисления пути , позволяющая осуществлять непрерывное отслеживание даже без GPS.
Шаг 3. Локализация дефекта
Когда камеры или ультразвуковые датчики обнаруживают коррозию или трещины, инерциальный измерительный блок GuideNav MEMS предоставляет точные пространственные координаты.
Это позволяет инженерам связать каждый дефект с его точным местоположением на трубопроводе.
Шаг 4. Создание карты
Объединенный поток данных создает карту проверки трубопровода , сопоставляя отчеты о структурной целостности с физическими координатами — процесс, который стал возможен только благодаря инерциальной навигации на базе инерциальных измерительных блоков MEMS.
Короче говоря: от простого ускорения до точного картографирования каждый этап процесса зависит от точности и стабильности смещения инерциального измерительного блока GuideNav MEMS, работающего в сложных подземных или подводных условиях.

Роль устойчивости к смещениям в подземной навигации
Почему важна стабильность смещения
В роботе, проверяющем трубопроводы , важен каждый градус отклонения.
Внутри длинных трубопроводов, на которых отсутствует прием сигналов ГНСС , даже небольшое смещение инерциального измерительного блока может привести к значительным позиционным ошибкам после нескольких часов перемещения.
Например, смещение гироскопа на 1°/ч может привести к отклонению расчетного положения робота на несколько метров — этого будет достаточно, чтобы неправильно обозначить место коррозии.
Что вызывает дрейф предубеждений
Нестабильность смещения в инерциальных измерительных блоках MEMS обычно возникает из-за:
- Колебание температуры в трубопроводе
- Длительная вибрация и механическое напряжение
- Производственные изменения и старение элементов МЭМС
Эти факторы постепенно искажают инерциальной навигации , что приводит к неточному картографированию и ложным позиционным данным.
Как промышленные инерциальные измерительные приборы MEMS решают эту проблему
Высококачественные промышленные датчики, такие как инерциальные измерительные блоки GuideNav MEMS, используют:
- Цифровая компенсация с замкнутым контуром
- Мультитемпературная калибровка
- Оценка смещения в реальном времени с помощью фильтрации Калмана
Это обеспечивает отличную устойчивость к смещению, позволяя роботу для осмотра трубопроводов проходить несколько километров с минимальным смещением.
Такая производительность определяет разницу между датчиками потребительского уровня и промышленными инерциальными навигационными системами MEMS, используемыми для точного контроля инфраструктуры.
Борьба с вибрацией — механическая и алгоритмическая компенсация
Внутри активных трубопроводов насосы и турбулентность потока создают постоянную вибрацию, которая нарушает инерциальную навигацию .
Низкокачественные инерциальные измерительные блоки MEMS часто ошибочно распознают эти колебания как реальное движение, что приводит к дрейфу и нестабильному положению роботов, проверяющих трубопроводы .
Инерциальные измерительные блоки GuideNav MEMS решают эту проблему с помощью микродемпфированной механической конструкции, цифровой фильтрации и адаптивных алгоритмов Калмана, которые устраняют вызванные вибрацией смещения в реальном времени.
Температурная стабильность и тепловая калибровка
Трубопроводы часто пролегают через среды от промерзающей почвы до зон горячих компрессоров, где изменения температуры могут исказить инерциального измерительного блока MEMS .
Нестабильная температура влияет на смещение и масштабный коэффициент, что приводит к дрейфу навигации в роботах для осмотра трубопроводов .
Чтобы противостоять этому, в инерциальных измерительных блоках GuideNav MEMS используются многоточечная калибровка температуры и цифровые модели термокомпенсации , обеспечивающие стабильность смещения в диапазоне температур от –40 °C до +85 °C.
Это гарантирует постоянную инерциальной навигации в длительных миссиях, даже в условиях серьезных изменений окружающей среды, что является критическим преимуществом для подземных или подводных операций, где отсутствует возможность использования ГНСС .
Слияние датчиков — ключ к долговременной точности
Даже самый стабильный MEMS IMU со временем накапливает дрейф.
Для поддержания точности работы роботов, проверяющих трубопроводы , необработанные инерциальной навигации должны быть объединены с данными колесных энкодеров, датчиков давления или ультразвуковых дальномеров.
Используя усовершенствованную фильтрацию Калмана или слияние состояний ошибок , инерциальные измерительные блоки GuideNav MEMS объединяют эти сигналы для непрерывной оценки и коррекции смещения.
Такой многосенсорный подход сводит к минимуму накопленную ошибку, обеспечивая точную траекторию и локализацию дефекта на больших расстояниях.
В условиях отсутствия ГНСС такое интеллектуальное слияние датчиков превращает необработанные инерциальные данные в надежные и реальные навигационные характеристики.
Неконтролируемый дрейф не приводит к немедленному сбою, но незаметно снижает точность . Регулярная заводская калибровка позволяет поддерживать инерциальный измерительный блок FOG в пределах его первоначальных характеристик.
Инженерные соображения по интеграции MEMS IMU
Даже самый точный MEMS-IMU может потерять производительность при неправильной установке.
В роботе для осмотра трубопроводов точное механическое выравнивание и жесткое крепление имеют решающее значение для надежной инерциальной навигации .
Несоответствие осей инерциального измерительного блока и корпуса робота может привести к ошибкам масштабирования и поперечным осям, которые никакое программное обеспечение не может полностью исправить.
Инерциальные измерительные блоки GuideNav MEMS калибруются на заводе с точностью ортогональности 200 ppm и оснащены интерфейсами RS-422 или CAN для легкой интеграции с промышленными контроллерами.
Правильная установка обеспечивает постоянную устойчивость смещения и точное отслеживание движения, обеспечивая надежную навигацию в подземных трубопроводах, где отсутствует прием сигналов GNSS .
Взгляд в будущее — MEMS IMU как мозг автономных конвейерных роботов
Роботы-инспекторы трубопроводов нового поколения становятся полностью автономными.
По своей сути, MEMS IMU обеспечивает непрерывную инерциальную навигацию в условиях отсутствия приема сигналов ГНСС , позволяя точно управлять движением и отображать дефекты.
измерительные блоки GuideNav MEMS будут интегрированы с аналитикой искусственного интеллекта для более интеллектуальной, самокорректирующейся навигации, что сделает инерциальный измерительный блок не просто датчиком, а интеллектуальным ядром каждого автономного подземного робота.
