Оглавление
- Что такое ИМУ?
- Компоненты инерционного измерительного блока
- Как работает инерциальный измерительный блок?
- Автономные и беспилотные транспортные средства
- Аэрокосмическая промышленность и авиация
- Робототехника
- Виртуальная реальность (VR) и дополненная реальность (AR)
- Медицинское оборудование
- Спортивная аналитика и захват движения
- Бытовая электроника
- MEMS IMU против FOG IMU: ключевые различия
- MEMS IMU: обзор и характеристики
- FOG IMU: обзор и характеристики
- Показатели эффективности ИДУ
- Методы калибровки IMU
- Преимущества инерциальных единиц измерения
- Ограничения инерциальных единиц измерения
- IMU против AHRS (система ориентации и направления)
- IMU против INS (инерциальная навигационная система)
- Различные типы IMU и обзор их рынка
- Будущие тенденции и развитие инерциального измерительного блока
Введение
Инерциальные измерительные устройства (IMU) имеют решающее значение в современных высокотехнологичных отраслях, включая автономные транспортные средства, робототехнику и аэрокосмическую промышленность. Однако, несмотря на их широкое использование, многие до сих пор не могут полностью понять, как работают IMU и их потенциал. Без этого понимания существует риск неэффективности и ошибок в работе системы. В этой статье мы рассмотрим основы IMU, их применение и будущие тенденции, чтобы вы могли получить максимальную отдачу от этой технологии.
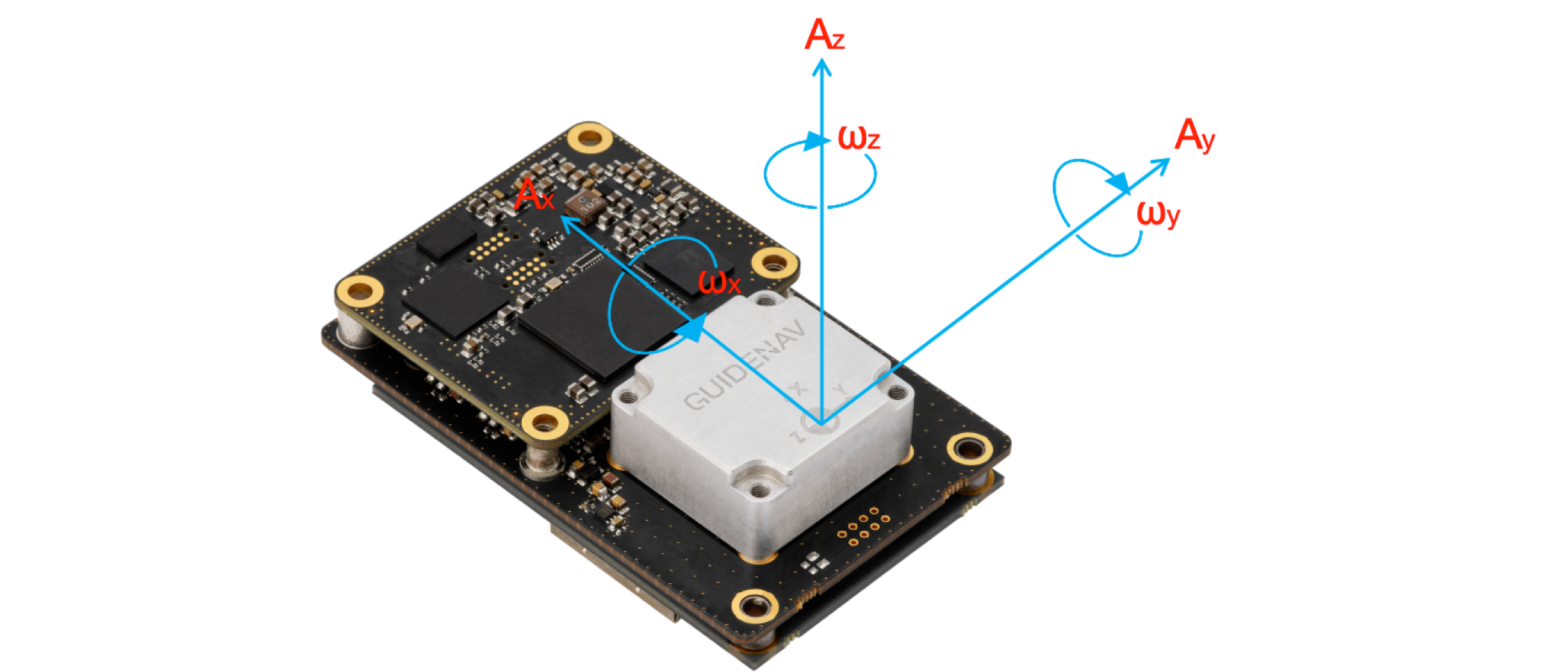
Инерционный измерительный блок (IMU) — это устройство, которое измеряет ускорение, угловую скорость и иногда магнитные поля для определения ориентации и положения объекта. IMU необходимы в системах навигации, управления и отслеживания движения. Объединив данные датчиков, IMU позволяют точно отслеживать движение и ориентацию в средах, где сигналы GPS могут быть слабыми или недоступными.
Будущее IMU является захватывающим: такие тенденции, как объединение датчиков и интеграция искусственного интеллекта, открывают новые возможности. Давайте углубимся в то, как работают эти системы и какое будущее ждет их роль в передовых технологиях.
Основы инерциальной единицы измерения (IMU)
Компоненты инерционного измерительного блока
IMU обычно включает в себя следующие ключевые датчики. Давайте разберем их и посмотрим, как каждый из них способствует общей функциональности:
| Компонент | Функция | Выход |
|---|---|---|
| Акселерометр | Измеряет линейное ускорение по осям X, Y и Z. | Предоставляет данные о скорости и перемещении. |
| Гироскоп | Измеряет угловую скорость (скорость вращения) вокруг осей X, Y и Z. | Предоставляет данные об ориентации (отношении). |
| Магнитометр (дополнительно) | Измеряет силу и направление магнитного поля относительно магнитного поля Земли. | Обеспечивает курс (направление компаса). |
Каждый из этих датчиков играет решающую роль в предоставлении данных о движении в реальном времени, помогая нам понять, как объект движется и вращается в пространстве.
Как работает инерциальный измерительный блок?
Вот как мы в GuideNav разрабатываем IMU для бесперебойной работы:
- Измерение ускорения : Акселерометр обнаруживает изменения скорости по трем осям. Эти данные позволяют нам определить, насколько быстро объект ускоряется или замедляется, что имеет решающее значение для отслеживания смещения с течением времени.
- Измерение угловой скорости : гироскоп отслеживает, насколько объект вращается вокруг каждой из трех осей. Интегрируя эти данные о вращении во времени, IMU может сообщить нам точную ориентацию объекта в пространстве.
- Измерение магнитного поля (дополнительно) . Если включено, магнитометр измеряет магнитное поле Земли, определяя курс по компасу. Это помогает исправить любые отклонения в показаниях гироскопа, обеспечивая точность IMU в течение длительных периодов времени.
В GuideNav мы используем алгоритмы объединения датчиков для объединения данных от этих компонентов. Поступая таким образом, мы создаем очень точное представление положения и ориентации объекта в трехмерном пространстве.
Применение инерциальных единиц измерения (IMU)
Инерционные измерительные блоки (IMU) используются в широком спектре приложений, предоставляя важные данные об ускорении, угловой скорости, а иногда и о магнитных полях. Их точность и универсальность делают их незаменимыми в таких отраслях, как автономные транспортные средства, аэрокосмическая промышленность, робототехника, виртуальная реальность, здравоохранение, спортивная аналитика и бытовая электроника. Ниже мы рассмотрим некоторые ключевые приложения, в которых IMU незаменимы.
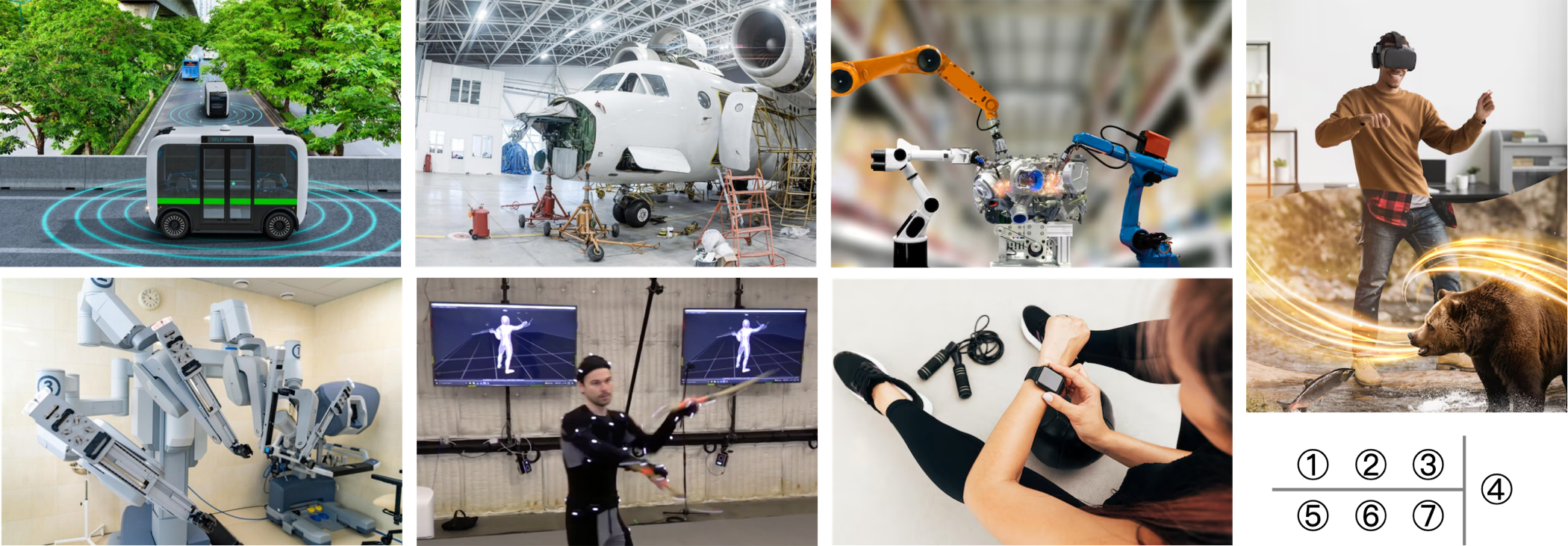
1. Автономные и беспилотные транспортные средства.
IMU имеют решающее значение в разработке и эксплуатации автономных транспортных средств . Они помогают отслеживать движение и ориентацию автомобиля в режиме реального времени, обеспечивая стабильность и точную навигацию. Хотя глобальной системы позиционирования (GPS) часто используются для позиционирования, IMU необходимы, когда сигналы GPS слабы или недоступны (например, в туннелях, городских каньонах или отдаленных районах).
| Приложение | Роль ИДУ |
|---|---|
| Автономные автомобили | Предоставляет данные об ориентации и движении автомобиля для обеспечения стабильной навигации. |
| Дроны | Обеспечивает точный контроль траектории и положения полета. |
| Роботизированные транспортные средства | Отслеживает движение по бездорожью или в условиях отсутствия GPS. |
2. Аэрокосмическая промышленность и авиация
ИДУ уже давно стали неотъемлемой частью аэрокосмической и авиационной промышленности. Они предоставляют данные в режиме реального времени об ориентации и движении самолетов и космических кораблей. IMU используются как в коммерческой авиации, так и в освоении космоса , обеспечивая высокую надежность и точность в сложных условиях, где GPS может быть недоступен или непрактичен.
| Приложение | Роль ИДУ |
|---|---|
| Навигация самолета | Предоставляет данные об ориентации (ориентации) для стабильного полета. |
| Навигация космического корабля | Обеспечивает точную ориентацию и контроль движения в пространстве. |
| Спутниковая ориентация | Сохраняет ориентацию и траекторию спутника во время работы. |
3. Робототехника
В робототехнике IMU используются для мониторинга движения, ориентации и баланса роботов, будь то в промышленных, медицинских или потребительских приложениях. IMU обеспечивают обратную связь с системами управления роботами, обеспечивая плавное и точное движение в различных условиях.
| Приложение | Роль ИДУ |
|---|---|
| Промышленные роботы | Обеспечивает стабильное движение во время производственных задач. |
| Медицинские роботы | Обеспечивает точный контроль движений во время операций и реабилитации. |
| Автономные роботы | Отслеживает положение и ориентацию для навигации в динамичных средах. |
4. Виртуальная реальность (VR) и дополненная реальность (AR)
В мире виртуальной реальности (VR) и дополненной реальности (AR) IMU являются ключевыми компонентами для отслеживания движений головы и тела пользователей. Измеряя вращение, ускорение, а иногда и магнитные поля, IMU предоставляют данные о движении в реальном времени, что усиливает эффект погружения.
| Приложение | Роль ИДУ |
|---|---|
| VR-гарнитуры | Отслеживает движения головы для настройки виртуальной среды. |
| AR-устройства | Отслеживает движения рук для взаимодействия с виртуальными объектами. |
| Управление жестами | Распознает жесты пользователя для взаимодействия с системами AR/VR. |
5. Медицинское оборудование
ИДУ все чаще интегрируются в медицинские устройства для различных целей, включая отслеживание движения, реабилитацию и диагностику. Их способность измерять точные движения делает их бесценными для понимания и мониторинга прогресса пациента.
| Приложение | Роль ИДУ |
|---|---|
| Физическая реабилитация | Отслеживает движения пациентов во время терапии, чтобы отслеживать прогресс. |
| Носимые устройства | Отслеживает двигательные нарушения, например, у пациентов с болезнью Паркинсона. |
| Захват движения для диагностики | Измеряет аномальные движения в диагностических целях. |
6. Спортивная аналитика и захват движения
IMU широко используются в спортивной аналитике и захвате движения для мониторинга результатов спортсменов и оптимизации их движений. Точное отслеживание движений, обеспечиваемое IMU, помогает предотвратить травмы, анализировать производительность и улучшать ее.
| Приложение | Роль ИДУ |
|---|---|
| Выступление спортсмена | Отслеживает данные о движении для анализа скорости, ускорения и эффективности. |
| Профилактика травм | Отслеживает движения для выявления рисков и оптимизации тренировок. |
| Захват движения | Захватывает движения человека для использования в фильмах, анимации и играх. |
7. Бытовая электроника
IMU также встроены во многие бытовой электроники , такие как смартфоны, носимые устройства и игровые контроллеры. Эти устройства используют IMU для обнаружения движения и ориентации, обеспечивая различные функции и улучшая взаимодействие с пользователем.
| Приложение | Роль ИДУ |
|---|---|
| Смартфоны | Включает поворот экрана, управление на основе движения и отслеживание активности. |
| Фитнес-трекеры | Отслеживает количество шагов, расстояние и физическую активность. |
| Игровые контроллеры | Отслеживает движения игрока для захватывающего игрового процесса. |
Типы инерциальных измерительных блоков (IMU): MEMS IMU против FOG IMU
Инерциальные измерительные блоки (IMU) необходимы во многих отраслях промышленности, особенно в оборонной и аэрокосмической промышленности, где высокая точность имеет решающее значение. Два основных типа IMU, MEMS IMU (микроэлектромеханические системы) и FOG IMU (IMU волоконно-оптического гироскопа) , существенно различаются по производительности, размеру, стоимости и пригодности для различных приложений.
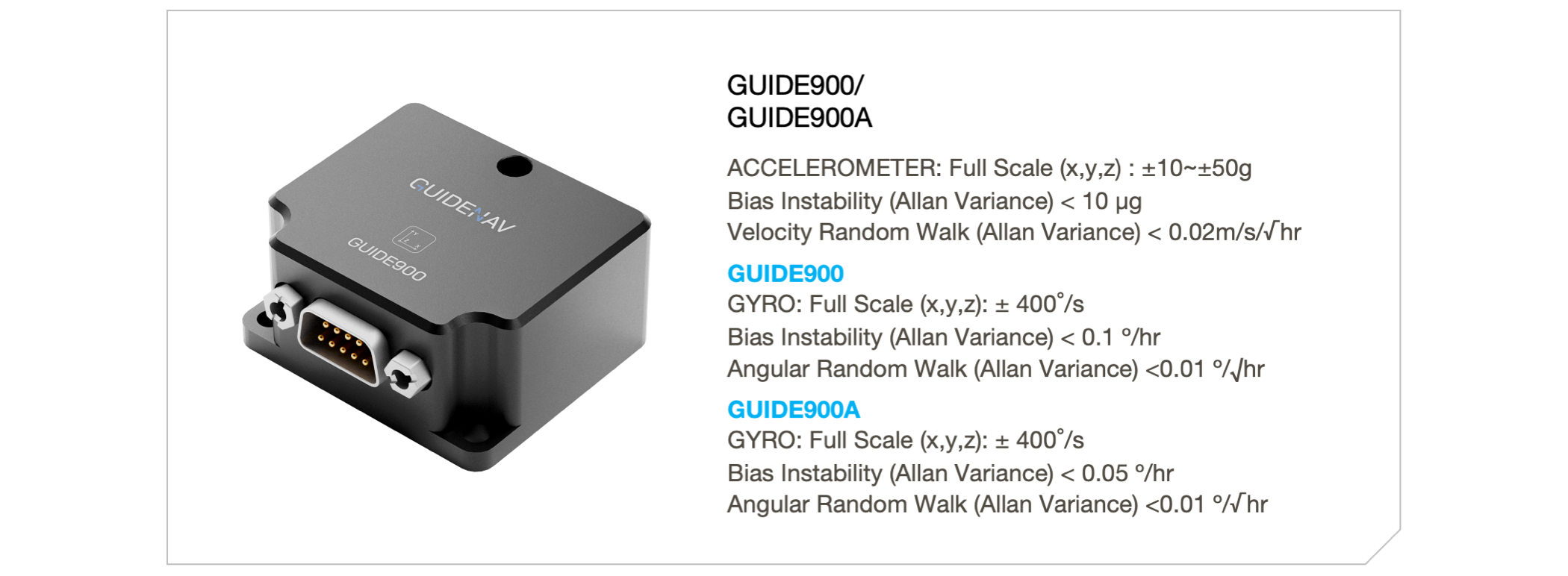
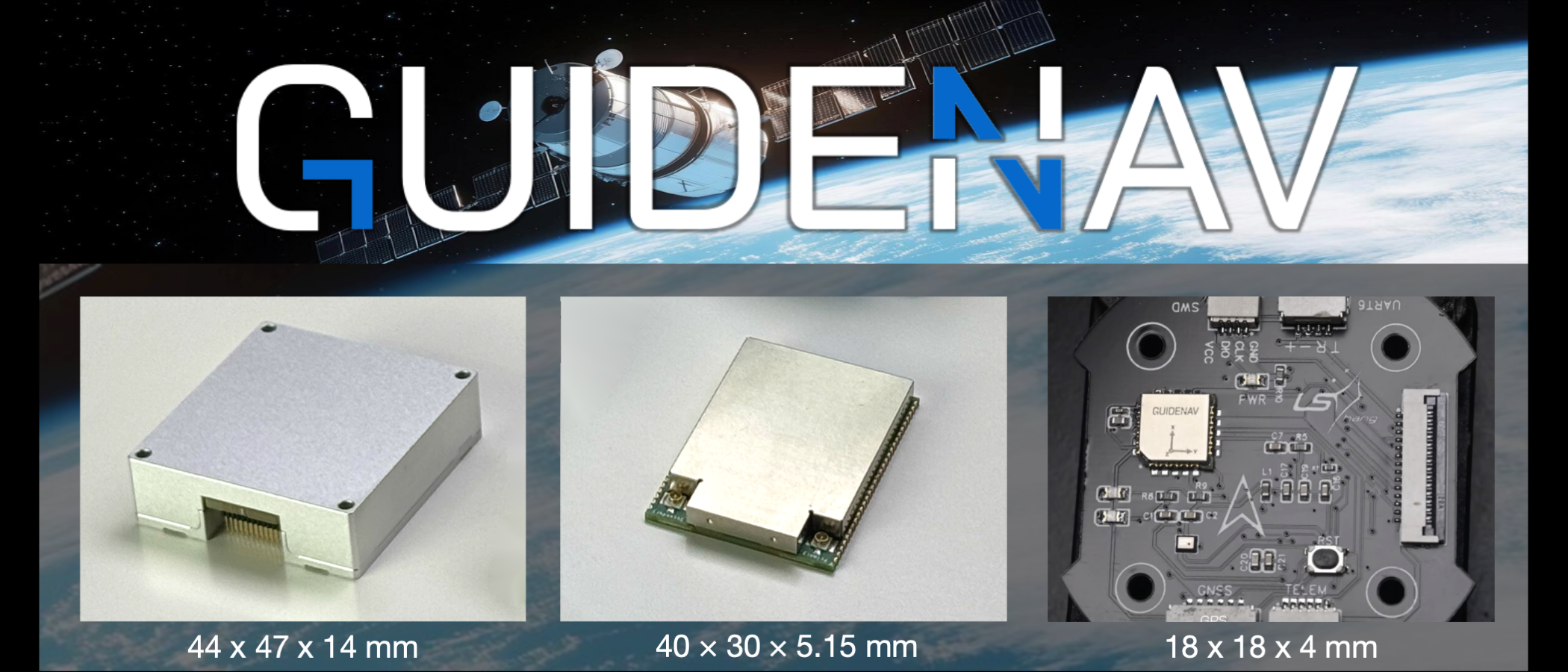
Хотя IMU FOG традиционно использовались в высокоточных областях, таких как аэрокосмическая, оборонная и робототехника, последние достижения в области IMU MEMS , такие как GUIDE900 и GUIDE900A , теперь обеспечивают уровни точности 0,1°/час и 0,05°/час , что FOG IMU начального уровня . Это улучшение позволяет использовать MEMS IMU высокоточных приложениях , в которых ранее доминировали FOG IMU .
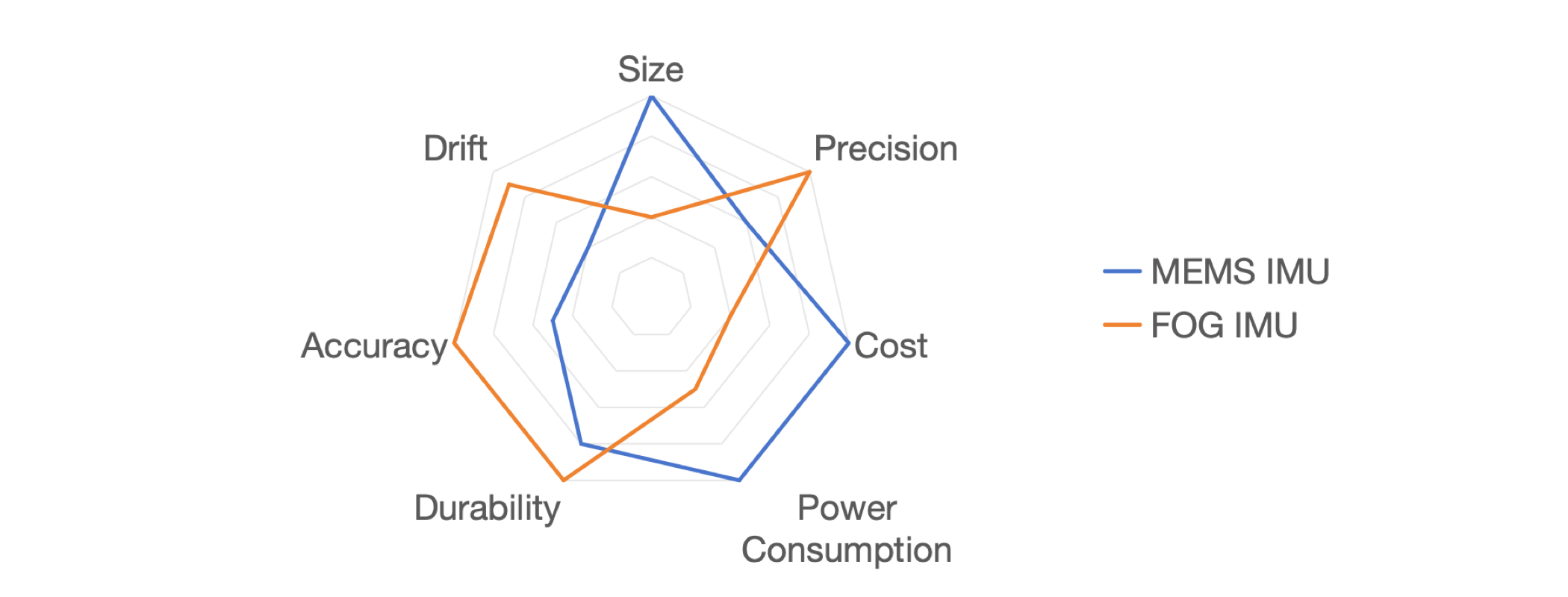
MEMS IMU против FOG IMU: ключевые различия
| Параметр | МЭМС ИДУ | ТУМАН ИДУ |
|---|---|---|
| Технология | На основе микроэлектромеханических систем (МЭМС) . | Использует оптоволоконные гироскопы (ВОГ) для измерения угловой скорости. |
| Размер | Компактный и легкий , идеально подходит для портативных устройств. | Более крупный, более прочный, подходит для прецизионных применений в крупномасштабных системах. |
| Точность | Умеренная точность, но новые высокоточные MEMS IMU могут достигать 0,1°/час или 0,05°/час . | Чрезвычайно высокая точность, минимальный дрейф и большая стабильность во времени. |
| Расходы | Низкая стоимость делает их идеальными для применения на массовом рынке. | Более высокая стоимость обусловлена передовыми технологиями, используемыми в системах высокого класса. |
| Потребляемая мощность | Низкое энергопотребление , подходит для устройств с батарейным питанием. | Более высокое энергопотребление лучше подходит для систем с более высоким энергетическим бюджетом. |
| Долговечность | Менее долговечен в экстремальных условиях окружающей среды. | Очень прочный, способен выдерживать суровые условия. |
| Точность | Подходит для применений с низкой и средней точностью. | Высокая точность, подходит для высокоточной навигации и стабильности. |
| Приложения | Бытовая электроника, автомобильные системы, дроны, БПЛА, **военные системы**. | Аэрокосмическая, оборонная, промышленная робототехника, высококлассные навигационные системы. |
| Дрифт | Более высокий дрейф с течением времени, требующий повторной калибровки. | Очень низкий дрейф, идеален для длительной работы без повторной калибровки. |
| Время ответа | Более быстрый отклик благодаря меньшему размеру и более простой конструкции. | Немного более медленный отклик, но обеспечивает более высокую стабильность с течением времени. |
MEMS IMU: обзор и характеристики
В единицах измерения энергии MEMS I используется микроэлектромеханических систем (MEMS) , в которой небольшие механические компоненты интегрируются с электроникой на микрочипе. Основными преимуществами MEMS IMU являются их небольшой размер , низкая стоимость и низкое энергопотребление . Эти особенности делают MEMS IMU идеальными для применения в бытовой электронике, автомобильных системах и, все чаще, в военных приложениях .
В GuideNav мы особенно гордимся нашими высокоточными MEMS IMU такими как GUIDE900 и GUIDE900A , которые обеспечивают точность 0,1°/час и 0,05°/час соответственно, что делает их подходящими для некоторых высокоточных приложений, которые традиционно доминировали. от FOG IMU .
Основные характеристики MEMS IMU:
- Маленький размер : идеально подходит для компактных устройств, таких как смартфоны , носимые устройства и военные дроны .
- Низкая стоимость : идеально подходит для приложений с большими объемами, таких как автомобильные системы , бытовая электроника и оборонные системы , которым необходимо сбалансировать производительность и доступность.
- Умеренная точность . Хотя IMU MEMS традиционно обеспечивают более низкую точность, чем IMU FOG , высокоточные модели теперь устраняют этот пробел для многих оборонных приложений.
- Низкое энергопотребление : высокая эффективность для устройств с батарейным питанием, что имеет решающее значение для военных дронов , интеллектуальных систем вооружения и других технологий мобильной защиты.
Применение MEMS IMU:
- Защита : используется в военных дронах , навигационных системах для бронетехники и системах наведения ракет . Эти приложения выигрывают от компактности и низкой стоимости MEMS IMU
- Бытовая электроника : встречается в смартфонах , фитнес-трекерах и игровых контроллерах .
- Автомобильные системы : используются в системах контроля устойчивости транспортных средств и автономной навигации .
- Дроны и БПЛА : обеспечение ориентации и стабилизации военных дронов и БПЛА потребительского класса .
FOG IMU: обзор и характеристики
В IMU FOG используются оптоволоконные гироскопы (FOG) для измерения угловой скорости, что позволяет им обеспечивать чрезвычайно высокую точность и стабильность. Это делает IMU FOG идеальными для приложений, требующих минимального дрейфа и долгосрочной надежности, таких как аэрокосмическая навигация , наведение ракет и высокотехнологичная робототехника .
В то время как IMU FOG широко известны своей точностью и долговечностью, IMU MEMS сокращают разрыв в производительности, особенно в военных приложениях , где ключевыми факторами являются стоимость, размер и энергопотребление.
Ключевые особенности FOG IMU:
- Высокая точность : IMU FOG имеют чрезвычайно низкий дрейф, что делает их идеальными для высокоточных приложений, таких как спутниковая навигация и военные системы наведения.
- Долговечность : Благодаря способности работать в экстремальных условиях окружающей среды, IMU FOG идеально подходят для аэрокосмических и военных систем , которым необходимо работать в суровых условиях.
- Более высокое энергопотребление . IMU FOG обычно потребляют больше энергии, что делает их более подходящими для систем с достаточными энергетическими ресурсами.
- Больший размер : IMU FOG более громоздки по сравнению с IMU MEMS , поэтому они используются в более крупных системах, таких как самолеты и космические корабли .
Применение FOG IMU:
- Аэрокосмическая промышленность : используется в самолетах и спутниковой навигации , где высокая точность и стабильность имеют решающее значение.
- Оборона : Широко используется в системах наведения ракет , беспилотных военных машинах и военных навигационных системах .
- Высококачественная робототехника : используется в промышленной робототехнике , хирургических роботах и автономных навигационных системах , где необходимы точность и долговременная стабильность.
Когда выбирать MEMS IMU или FOG IMU
| Вариант использования | МЭМС ИДУ | ТУМАН ИДУ |
|---|---|---|
| Бытовая электроника | Идеально подходит для смартфонов, носимых устройств и фитнес-трекеров. | Не подходит из-за высокой стоимости и энергопотребления. |
| Аэрокосмическая промышленность и авиация | Подходит для недорогих небольших систем с умеренными требованиями к точности. | Необходим для высокоточных систем навигации и ориентации. |
| Автономные транспортные средства | Подходит для недорогих решений с умеренными требованиями к производительности. | Необходим для высокоточной навигации в сложных условиях. |
| Военное дело и оборона | Используется в **военных дронах**, **навигационных системах** для **транспортных средств** и **системах наведения ракет**. | Широко используется для наведения ракет, дронов и навигации в сложных условиях. |
| Робототехника | Подходит для роботов потребительского уровня или образовательных проектов. | Предпочтительно для промышленных роботов, хирургических роботов и других прецизионных систем. |
Производительность и калибровка инерционного измерительного блока (IMU)
На производительность инерциальных измерительных блоков (IMU) могут влиять различные факторы, такие как дрейф датчика, температура и условия окружающей среды. Чтобы обеспечить оптимальную производительность, важно понимать ключевые показатели эффективности (KPI) IMU и методы калибровки, используемые для повышения их точности.
Показатели эффективности ИДУ
Производительность инерциального измерительного блока (IMU) оценивается на основе нескольких ключевых факторов, которые напрямую влияют на его точность и надежность. Ниже приведены наиболее важные показатели эффективности IMU:
| Индикатор эффективности | Описание |
|---|---|
| Стабильность смещения | Согласованность показаний IMU с течением времени. Стабильный IMU будет иметь минимальные отклонения в измерениях. |
| Масштабный коэффициент | Соотношение между фактическим физическим движением и мощностью ИДУ. Любые ошибки в этом соотношении могут привести к неправильной интерпретации данных. |
| Шум | Случайные изменения показаний датчиков IMU. Низкий уровень шума указывает на более высокую точность измерений. |
| Случайное блуждание | Описывает дрейф измерений с течением времени. Это относится к тому, насколько измерение отклоняется от истинного значения из-за случайного шума. |
| Разрешение | Наименьшее измеримое изменение показаний датчика IMU. Более высокое разрешение повышает точность измерений. |
| Нелинейность | Отклонение от прямой зависимости между входом и выходом. Нелинейности могут вызывать ошибки при более высоких ускорениях или угловых скоростях. |
| Чувствительность к температуре | Изменения в измерениях IMU из-за изменений температуры окружающей среды. IMU с низкой температурной чувствительностью более точны в изменяющихся условиях окружающей среды. |
Методы калибровки IMU
Калибровка — это жизненно важный процесс, который помогает повысить точность инерциального измерительного блока (IMU) путем исправления ошибок, которые могут возникнуть из-за дрейфа датчика, несоосности и других факторов. Калибровка IMU обычно включает в себя три основные системы датчиков: акселерометр , гироскоп и магнитометр . Каждый из этих датчиков требует особых методов калибровки для обеспечения точных и надежных измерений.
1. Калибровка акселерометра
Акселерометр в IMU измеряет линейное ускорение по осям X, Y и Z. Однако он часто подвержен таким ошибкам, как отклонения масштабного коэффициента, перекосы и неортогональность осей.
| Метод калибровки | Описание |
|---|---|
| Статическая калибровка | Распространенный метод, при котором IMU размещается в известной ориентации (например, ровно на поверхности). Ошибки датчика можно исправить, измеряя ускорение свободного падения (9,81 м/с²). |
| Динамическая калибровка | Включает в себя перемещение IMU через различные известные ускорения и направления для коррекции ошибок масштабного коэффициента, смещения и несоосности между осями. |
| Температурная компенсация | Поскольку акселерометры чувствительны к температуре, калибровка также включает компенсацию изменений температуры, которые могут вызвать ошибки измерений. |

2. Калибровка гироскопа
Гироскоп угловую скорость вокруг осей X, Y и Z IMU. Гироскопы могут страдать от дрейфа (когда показания датчиков медленно изменяются с течением времени) и нестабильности смещения (когда измерения имеют постоянное смещение).
| Метод калибровки | Описание |
|---|---|
| Калибровка смещения нулевой скорости | В этом методе гироскоп помещается в неподвижное положение (без движения), а смещение или смещение измеряется и корректируется. |
| Калибровка таблицы норм | Это включает в себя вращение IMU с различными известными угловыми скоростями для определения любых ошибок нелинейности или масштабного коэффициента. |
| Калибровка температуры | Подобно акселерометрам, гироскопы чувствительны к изменениям температуры. Калибровка учитывает изменения в поведении датчика при разных температурах. |
Калибровка гироскопа гарантирует, что показания угловой скорости IMU будут точными и не будут иметь дрейфа, что улучшает его производительность в динамических средах.
3. Калибровка магнитометра
Магнитометр измеряет силу и направление магнитного поля Земли, предоставляя данные ориентации, которые используются для определения курса . На магнитометры могут влиять локальные магнитные возмущения, несоосность датчиков и ошибки масштабного коэффициента.
| Метод калибровки | Описание |
|---|---|
| Калибровка твердого железа | Этот метод компенсирует искажения магнитного поля, вызванные собственными компонентами IMU (например, электронными устройствами). |
| Калибровка мягкого железа | Корректирует искажения, вызванные окружающей средой или материалами рядом с IMU. |
| Многоточечная калибровка | Магнитометр подвергается воздействию различных известных значений напряженности и направлений магнитного поля для обнаружения и исправления ошибок. |
Калибровка магнитометра необходима для получения точных данных о курсе и ориентации, особенно когда IMU используется в средах с меняющимися магнитными условиями.
Преимущества и ограничения инерциальных единиц измерения (IMU)
Инерциальные измерительные блоки обеспечивают исключительную производительность в режиме реального времени, независимость от внешних систем и легко адаптируются к различным отраслям. Однако при выборе правильной технологии необходимо учитывать дрейф , чувствительность к окружающей среде и высокую стоимость прецизионных моделей IMU MEMS обеспечивают баланс между стоимостью и производительностью для многих потребительских и промышленных приложений, в то время как IMU FOG являются идеальным выбором для высокоточных и длительных задач в аэрокосмической и оборонной сферах. Понимание сильных и слабых сторон IMU поможет вам выбрать лучшую систему для ваших конкретных потребностей.
Преимущества инерциальных единиц измерения
| Преимущество | Описание |
|---|---|
| Высокая точность в динамических средах | IMU обеспечивают ускорения и угловой скорости в реальном времени автономных транспортных средствах , аэрокосмической отрасли и робототехнике , где GPS или другие внешние источники информации недоступны. |
| Независимость от внешних сигналов | IMU работают без использования внешних сигналов, таких как GPS , что делает их очень надежными в таких средах, как подземная навигация , исследование космоса или внутренняя робототехника . |
| Компактный и легкий | MEMS IMU небольшие и легкие, идеально подходят для таких приложений, как носимые устройства , дроны и бытовая электроника , где пространство и вес имеют решающее значение. |
| Низкое энергопотребление | MEMS IMU являются энергоэффективными и идеально подходят для устройств с батарейным питанием, таких как умные часы и фитнес-трекеры , которые должны работать в течение длительного времени. |
| Обработка данных в реальном времени | IMU передают высокочастотные данные с малой задержкой, что делает их пригодными для управления в реальном времени в робототехнике , стабилизации дронов и навигации транспортных средств . |
| Долговечность в суровых условиях | IMU FOG и некоторые высококачественные IMU MEMS могут выдерживать экстремальные условия, такие как высокая вибрация , колебания температуры и удары , что делает их идеальными для военного и аэрокосмического применения. |
Ограничения инерциальных единиц измерения
| Ограничение | Описание |
|---|---|
| Дрейф со временем | Гироскопы в IMU со временем дрейф неточным измерениям, если не проводить регулярную повторную калибровку. Это серьезная проблема в приложениях с длительным сроком действия. |
| Экологическая чувствительность | IMU чувствительны к условиям окружающей среды, таким как температура и вибрация , что может привести к ошибкам, особенно в MEMS IMU , которые более склонны к этим помехам. |
| Высокая стоимость (для моделей высокой точности) | Хотя MEMS IMU являются экономически эффективными, высокоточные IMU, такие как IMU FOG, дороги и могут не подходить для всех приложений из-за их высокой стоимости и энергопотребления. |
| Краткосрочная точность против долгосрочной стабильности | IMU обеспечивают высокую краткосрочную точность , но без внешней коррекции (например, GPS ) они испытывают долговременную нестабильность , что является проблемой для задач высокоточной навигации в течение длительных периодов времени. |
| Сложность объединения данных | IMU часто требуют объединения датчиков (например, интеграции GPS и магнитометров ) для исправления ошибок с течением времени, что усложняет систему и увеличивает вычислительную нагрузку. |
| Ограниченная точность в высокой динамике | В высокодинамичных приложениях MEMS IMU могут не соответствовать точности IMU FOG , особенно в таких приложениях, как наведение ракет или ориентация космического корабля , которые требуют сверхвысокой точности. |
Инерциальный измерительный блок (IMU) против других инерциальных систем: IMU против AHRS, IMU против INS
Инерциальные измерительные блоки (IMU) необходимы во многих высокотехнологичных приложениях, но они не единственные системы, доступные для измерения движения, ориентации и навигации. Системы ориентации и курса (AHRS) и инерциальные навигационные системы (INS) — две другие широко используемые системы, которые также полагаются на инерционные датчики. Хотя IMU предоставляют основные данные как для AHRS, так и для INS, эти системы предлагают дополнительные возможности и предназначены для конкретных случаев использования. Давайте рассмотрим, как IMU сравниваются с AHRS и INS .
IMU против AHRS (система ориентации и направления)
IMU , и AHRS используются для ориентации и отслеживания движения, но они различаются дополнительными функциями и соответствующими вариантами использования.
| Параметр | ИДУ | АХРС |
|---|---|---|
| Определение | **Инерциальный измерительный блок (IMU)** измеряет ускорение и угловую скорость, предоставляя необработанные данные о движении. | **Система определения ориентации и курса (AHRS)** объединяет **данные IMU** с дополнительными датчиками (например, магнитометрами) для предоставления данных об ориентации и курсе. |
| Компоненты | Обычно включает **акселерометры** и **гироскопы**, иногда **магнитометры**. | Используются **данные IMU** (акселерометры и гироскопы), а также **магнитометры** и иногда другие датчики (например, **GPS**, **барометры**). |
| Выход | Предоставляет необработанные данные об ускорении и угловой скорости. | Выводит ориентацию (отношение) и курс (направление компаса) в глобальной системе координат (например, север, восток, вниз). |
| Точность | IMU обеспечивают точное отслеживание движения, но со временем могут страдать от **дрейфа** из-за ошибок датчиков. | AHRS повышает точность за счет использования внешних эталонов (магнитометров, GPS), уменьшая дрейф с течением времени. |
| Сложность | Более простой дизайн и эксплуатация, обычно для базового отслеживания движения. | Более сложный из-за дополнительных |
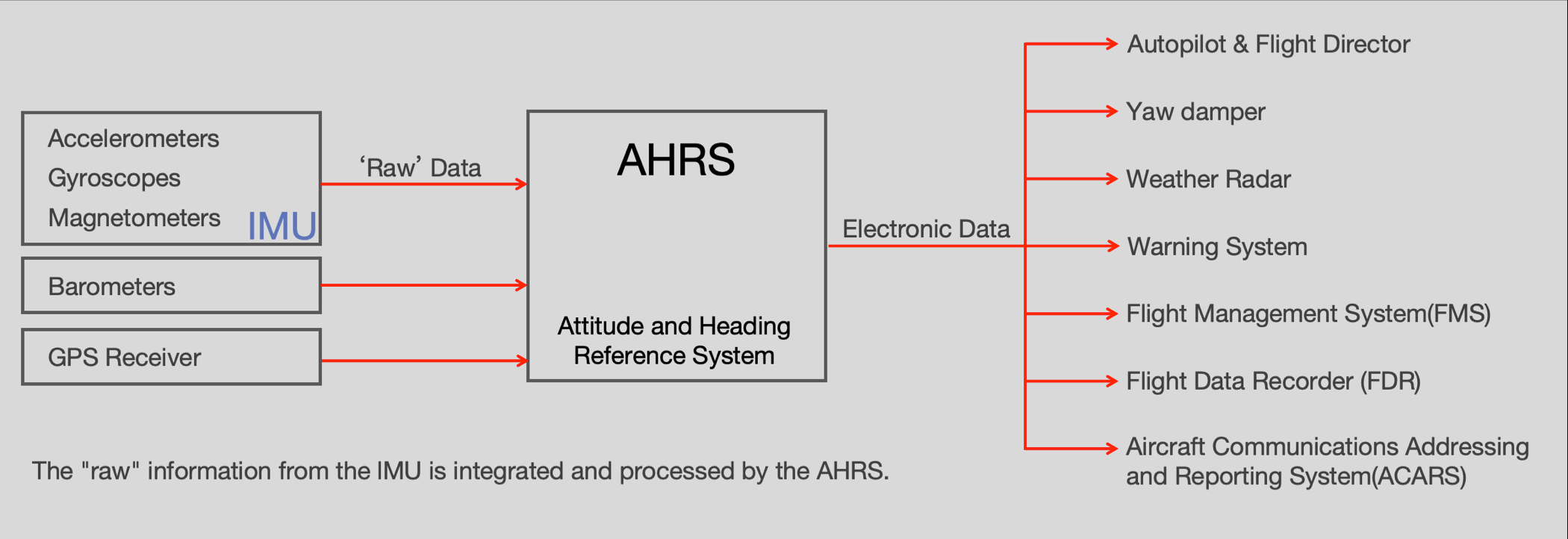
Ключевое отличие : IMU предоставляют необработанные данные датчиков, в то время как AHRS объединяет эти данные с другими датчиками (например, магнитометрами), чтобы обеспечить точную ориентацию и курс. AHRS обычно используется, когда требуется точная информация о положении и курсе.
IMU против INS (инерциальная навигационная система)
Инерциальная навигационная система (INS) — это более совершенная система, которая объединяет IMU с дополнительными возможностями обработки, часто используя алгоритмы, как фильтрация Калмана, для вычисления положения, скорости и ориентации объекта.
| Параметр | ИДУ | ИНС |
|---|---|---|
| Определение | **Инерциальный измерительный блок (IMU)** измеряет ускорение и угловую скорость, предоставляя необработанные данные о движении. | **Инерциальная навигационная система (INS)** сочетает в себе **IMU** с вычислительной обработкой (например, фильтром Калмана) для отслеживания положения, скорости и ориентации. |
| Компоненты | Включает **акселерометры** и **гироскопы**; иногда **магнитометры**. | Сочетает в себе **IMU**, **алгоритмы** объединения датчиков и иногда другие датчики (например, **GPS**). |
| Выход | Предоставляет данные об ускорении и угловой скорости. | Выводит **положение**, **скорость** и **ориентацию**, предоставляя полные навигационные данные. |
| Точность | IMU имеют ограниченную точность с течением времени из-за дрейфа. | **INS** со временем повышает точность за счет объединения данных IMU с алгоритмами, а иногда и с внешними поправками (например, GPS). |
| Сложность | Просто, предоставляет только данные о движении. | Сложный из-за объединения данных, обработки датчиков и необходимости вычислительных алгоритмов. |
| Приложения | Используется для базового отслеживания движения, например, в дронах, автомобилях и робототехнике. | Используется для **навигации** в **самолётах**, **подводных лодках**, **космических кораблях** и **военных целях**, где долгосрочное отслеживание местоположения имеет решающее значение. |
Ключевое отличие : в то время как IMU измеряют движение и ориентацию, INS использует эти данные вместе с алгоритмами для расчета положения , скорости и ориентации с течением времени, обеспечивая полное навигационное решение.
Рынок инерционных измерительных приборов и его будущее развитие: типы, перспективы рынка и тенденции
Инерциальные измерительные блоки (IMU) являются неотъемлемой частью современных систем навигации, отслеживания движения и контроля устойчивости в различных отраслях. Растущий спрос на автономные системы , робототехнику , аэрокосмическую промышленность и бытовую электронику стимулировал развитие технологий IMU, увеличивая их распространение во всем мире. Поскольку рынок ИДУ продолжает расширяться, важно понимать различные типы ИДУ, их текущие рыночные условия и тенденции, определяющие их будущее развитие.
Различные типы IMU и обзор их рынка
IMU бывают разных форм, каждая из которых соответствует разным требованиям к точности, размеру, стоимости и производительности. Наиболее часто используемые типы IMU — это MEMS IMU , FOG IMU и RLG IMU (кольцевые лазерные гироскопы IMU) . Каждый из них имеет свои уникальные характеристики, что делает его пригодным для конкретных применений. Давайте посмотрим на эти типы и их текущие рыночные сценарии.
1. МЭМС ИДУ
MEMS IMU получили наиболее широкое распространение благодаря своим компактным размерам , низкой стоимости и низкому энергопотреблению . Эти IMU полагаются на датчики микроэлектромеханических систем (MEMS) для измерения ускорения и угловой скорости. MEMS IMU отлично подходят для бытовой электроники, автомобильной техники и недорогих систем.
| Характеристика | МЭМС ИДУ |
|---|---|
| Размер | Компактный , маленький и легкий. |
| Расходы | Низкая стоимость делает их доступными для массового рынка. |
| Точность | Умеренная точность, хотя новые модели обеспечивают более высокую точность (например, **0,1°/ч**). |
| Приложения | Используется в **бытовой электронике**, **автомобильных системах**, **дронах**, **робототехнике** и **носимых устройствах**. |
| Рост рынка | Сильный рост обусловлен **смартфонами**, **автомобильной безопасностью**, **технологиями дронов** и **устройствами Интернета вещей**. |
Перспективы рынка MEMS IMU:
что рынок MEMS IMU будет продолжать расти благодаря их доступности и универсальности. Эти IMU все чаще используются в смартфонах , носимых устройствах , автомобильных системах безопасности , стабилизации дронов и робототехнике . Секторы автомобилестроения и бытовой электроники остаются ключевыми драйверами роста благодаря растущему внедрению беспилотных автомобилей и IoT (Интернета вещей) .
2. FOG IMU (оптоволоконные гироскопы IMU)
IMU FOG обеспечивают высокую точность и низкий дрейф , что делает их идеальными для аэрокосмических , оборонных и навигационных систем в средах, требующих долговременной стабильности и точности. ВОГ используют оптоволоконную технологию для измерения угловой скорости и известны своей надежностью в экстремальных условиях.
| Характеристика | ТУМАН ИДУ |
|---|---|
| Размер | Больше и надежнее, чем MEMS IMU, и предназначены для высокоточных приложений. |
| Расходы | **Более высокая стоимость** делает их пригодными для специализированного применения в **аэрокосмической** и **военной** отраслях. |
| Точность | **Высокая точность** с минимальным дрейфом, идеально подходит для **долговременной стабильности** в **аэрокосмической**, **оборонной** и **навигационных системах**. |
| Приложения | Используется в **аэрокосмической**, **военной обороне**, **высокотехнологичных навигационных системах** и **системах точного наведения**. |
| Рост рынка | Устойчивый рост в секторах **аэрокосмической**, **военной** и **высокоточной навигации**, но ограниченный высокими затратами. |
Перспективы рынка FOG IMU:
Ожидается, что рынок FOG IMU будет стабильно расти в аэрокосмической , военной оборонной и высокоточной навигационной сферах. Растущий спрос на автономные транспортные средства , исследования космоса и системы наведения ракет будет способствовать внедрению FOG IMU. Однако их высокая стоимость и энергопотребление остаются ограничивающими факторами для более широкого проникновения на рынок, особенно в недорогих потребительских приложениях.
3. RLG IMU (кольцевые лазерные гироскопы IMU)
IMU RLG аналогичны IMU FOG , но для измерения угловой скорости используются кольцевые лазерные гироскопы . ИДУ RLG известны своей чрезвычайно высокой точностью и стабильностью и часто используются в военной, аэрокосмической и других высокопроизводительных отраслях.
| Характеристика | РЛГ ИДУ |
|---|---|
| Размер | Аналогичны **FOG IMU**, **большие** и более прочные, предназначены для **высокоточных приложений** в суровых условиях. |
| Расходы | **Очень высокая стоимость**, как правило, предназначена для критически важных систем премиум-класса в **аэрокосмической** и **военной** отраслях. |
| Точность | **Чрезвычайно высокая точность** с минимальным дрейфом, часто используется в **системах навигации космических кораблей** и **системах наведения военных ракет**. |
| Приложения | Используется в **военных**, **космических кораблях**, **спутниковой навигации** и других **высокоточных системах обороны**. |
| Рост рынка | Несмотря на свою нишу, **RLG IMU** по-прежнему имеют решающее значение для **высокопроизводительных оборонных**, **аэрокосмических** и **космических систем**. Рынок стабилен, наблюдается умеренный рост из-за высоких затрат. |
Перспективы рынка IMU RLG:
Хотя RLG IMU ограничен из-за его высокой стоимости, он по-прежнему важен для военной обороны и аэрокосмической отрасли, особенно для систем наведения ракет и . IMU RLG будут продолжать играть решающую роль в этих секторах, но могут столкнуться с конкуренцией со стороны IMU FOG и новых технологий.
Будущие тенденции и развитие инерциального измерительного блока
Будущее IMU отмечено несколькими ключевыми разработками, обусловленными достижениями в области сенсорных технологий, алгоритмов обработки данных и растущим спросом на прецизионные системы в различных отраслях. Вот некоторые из ключевых тенденций:
1. Миниатюризация и интеграция с другими датчиками
По мере роста спроса на компактные и эффективные системы растет тенденция к миниатюризации IMU . MEMS IMU будут продолжать развиваться, становясь еще меньше, экономичнее и мощнее. Кроме того, объединение датчиков является основной областью разработки, где IMU интегрируются с другими датчиками, такими как магнитометры , GPS и барометры , для повышения производительности и точности.
2. Высокая точность при меньших затратах
Последние достижения в MEMS IMU стимулируют тенденцию к достижению высокой точности при меньших затратах . Такие модели, как GUIDE900 и GUIDE900A, теперь могут достигать 0,1°/ч и 0,05°/ч , сокращая разрыв с помощью FOG IMU . Это означает, что MEMS IMU будут использоваться в более высокоточных приложениях, включая аэрокосмические и военные системы, в которых традиционно доминировали FOG IMU .
3. Интеграция в автономные системы
IMU являются неотъемлемой частью разработки автономных транспортных средств , дронов и робототехники . Растущий интерес к автономной навигации и точному управлению движением будет стимулировать спрос на усовершенствованные IMU. Интеграция IMU с алгоритмами искусственного интеллекта и машинным обучением позволяет системам более эффективно адаптироваться к реальным средам.
4. Использование искусственного интеллекта и сенсорного синтеза
Алгоритмы искусственного интеллекта будут играть все более важную роль в обработке данных IMU . Объединив данные IMU с входными данными других датчиков и используя машинное обучение , автономные системы смогут делать более точные прогнозы и корректировки. что сочетание IMU с такими технологиями, как системы технического зрения , LiDAR и радар, расширит границы навигации и стабилизации в реальном времени.
5. Повышенная долговечность и устойчивость к окружающей среде.
Ожидается, что IMU станут еще более надежными и устойчивыми к суровым условиям, таким как экстремальные температуры, вибрация и электромагнитные помехи. IMU FOG и IMU MEMS будут развиваться, чтобы удовлетворить растущий спрос в аэрокосмической , оборонной и промышленной сферах .
