По моему опыту проектирования инерциальных систем для полевых операций, инженеры часто упускают из виду один обманчиво простой показатель: случайный дрейф угла. Он не так эффективен, как стабильность смещения или пропускная способность, но определяет реальный предел того, как долго ваша система может оставаться надёжной, особенно при отказе ГНСС. Дрейф угла — это не ошибка, которую можно устранить калибровкой. Это шум, который растёт с каждой секундой. Как только вы поймёте, как он работает, вы измените свой подход к оценке каждого инерциального измерительного блока на вашем рабочем столе.
ARW — это не характеристика, а часы. С момента запуска вашего инерциального измерительного блока (IMU) он показывает, насколько быстро снижается доверие к ориентации. Чем оно ниже, тем дольше ваша система остаётся верной.
За годы работы я видел, как команды выбирали инерциальные измерительные блоки (IMU) на основе характеристик смещения и графиков пропускной способности, но в итоге сталкивались с дрейфом, не поддающимся моделированию. Этот дрейф часто связан не с тем, что они упустили, а с тем, что они недостаточно взвесили: ARW. Как только вы осознаете, что ARW определяет ваш шумовой горизонт, вы начинаете читать технические характеристики иначе. Вы перестаете спрашивать: «Какова точность?» и начинаете спрашивать: «Как долго я могу полагаться на эту штуку, прежде чем неопределенность возьмет верх?»
Оглавление
Что именно представляет собой случайное блуждание по углам (ARW)?
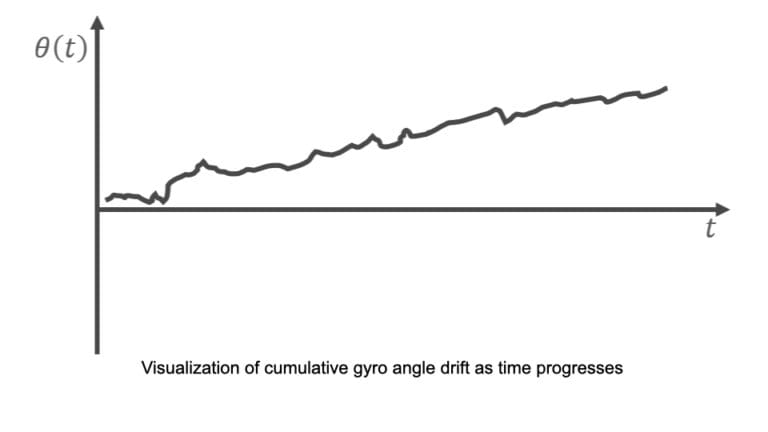
Проще говоря, случайный дрейф угла (ARW) — это шум, который накапливается в гироскопе в момент начала интегрирования угловой скорости. Но давайте проясним: это не ошибка измерения или дрейф смещения. ARW — это рост неопределённости, пропорциональный квадратному корню времени , возникающий из-за белого шума в тракте сигнала гироскопа. Его невозможно откалибровать, и нельзя ждать, пока он стабилизируется — он всегда присутствует, тикая в фоновом режиме.
Я часто описываю ARW младшим инженерам как «размытость базовой линии» вашей оценки ориентации . Неважно, движется ваша платформа или нет. Даже в лаборатории , с надёжно закреплённым на столе датчиком, ARW суммируется. Именно это делает его таким фундаментальным. Это не недостаток производительности — это физика.
Как ARW измеряется на практике?
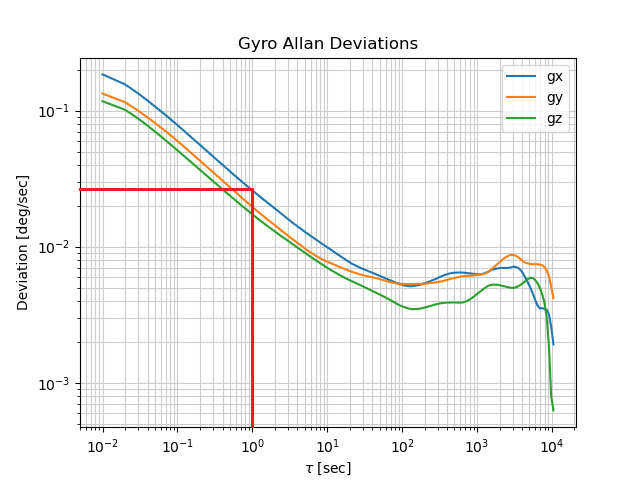
Золотым стандартом для измерения ARW является дисперсионный анализ Аллана.
Этот метод разлагает различные типы шума на различные временные интервалы. При коротких интервалах усреднения ARW проявляется в виде характерного наклона -½ на графике отклонения Аллана в логарифмическом масштабе. Это сигнатура белого шума в выходных данных вашего гироскопа, которая задаёт минимальный уровень точности определения положения.
Но нельзя просто доверять техническим характеристикам.
В своей работе я всегда провожу контролируемые статические испытания на механически изолированной платформе, регистрирую необработанные данные гироскопа и создаю собственные диаграммы Аллана. Чистый кратковременный наклон говорит о стабильности гироскопа. Если наклон зашумлён или неравномерен, я знаю, что заявленное значение «0,05°/√h» может не сработать при развёртывании.
ARW — это не просто число, это закономерность, которую вы должны увидеть в реальных данных.
Вот почему я отношусь к ARW как к чему-то, требующему проверки, а не просто к цитированию. Если ваша дисперсия Аллана не соответствует спецификации, последствия могут впоследствии пострадать от всего вашего стека слияния.
Почему ARW имеет решающее значение для точности инерциального измерительного блока?
Шум, который никогда не спит
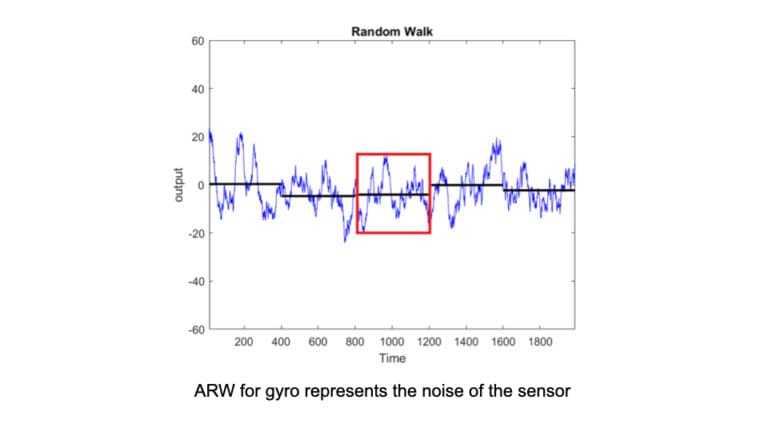
В отличие от детерминированных ошибок, таких как смещение или масштабный коэффициент, ARW постоянно вносит неопределенность в оценку ориентации. Поскольку гироскопы измеряют угловую скорость , и эти скорости интегрируются во времени , даже небольшие случайные отклонения приводят к значительному угловому дрейфу. Вам не нужны минуты или часы, чтобы почувствовать его влияние — на высокочувствительных платформах ARW начинает снижать точность уже через несколько секунд .
Невидимый потолок навигации
ARW устанавливает жёсткий предел того, как долго ваш инерциальный измерительный блок (IMU) может обеспечивать надёжную ориентацию при отсутствии внешних поправок (например, ГНСС или магнитометров). Я видел, как идеально настроенные фильтры Калмана постепенно теряли контроль над направлением просто потому, что базовый гироскоп имел ARW, слишком высокий для продолжительности миссии . Это не проблема программного обеспечения, а физическое ограничение. В каждой разработанной мной инерциальной системе, зная ARW, я могу предсказать, когда навигация даст сбой. И это очень важно.
Чем ARW отличается от нестабильности смещения?
| Угловое случайное блуждание (ARW) | Нестабильность смещения |
|---|---|
| Кратковременный шум. Мгновенно проявляется на выходе гироскопа в виде небольших случайных колебаний. | Среднесрочный и долгосрочный дрейф. Медленное отклонение уровня нулевой ставки с течением времени. |
| Увеличивается со временем. Приводит к непрерывному накоплению ошибки ориентации. | Имеет плоское плато на графиках дисперсии Аллана — это тот «горб», который ищут инженеры. |
| Непредсказуемо, но ограничено. Можно статистически смоделировать, но нельзя устранить. | Медленно меняющийся. Часто моделируется и частично компенсируется фильтрами. |
| Обеспечивает кратковременную точность. Особенно важно для быстродвижущихся, высокодинамичных систем. | Обеспечивает долговременную точность. Имеет значение в таких приложениях, как инерциальные системы навигации геодезического класса или длительная навигация. |
Почему такая путаница?
Потому что и ARW, и нестабильность смещения вызывают дрейф, но по-разному и в разных временных масштабах. Инженеры, впервые работающие с инерциальными системами, часто путают их , полагая, что дрейф смещения — единственный источник навигационной ошибки. По моему опыту, именно ARW часто ограничивает производительность в тактических миссиях , особенно когда время работы без ГНСС измеряется минутами, а не часами.
Каковы типичные значения ARW для различных инерциальных измерительных блоков?
В реальных проектах я редко задаюсь вопросом: «Какой инерциальный измерительный блок (IMU) ?» — я спрашиваю: «Какое минимальное значение ARW я могу получить при таком размере, весе и бюджете?» ARW часто является характеристикой, которая незаметно сообщает вам, является ли датчик потребительским, тактическим или стратегическим.
Вот как я вижу распределение ARW по классам датчиков:
| Класс ИДУ | Типичный ARW (°/√h) | Где ему место |
|---|---|---|
| Потребительские МЭМС | 1 – 10 | Телефоны, носимые устройства, робототехника начального уровня |
| Промышленные МЭМС | 0.1 – 1 | Дроны с ГНСС, легкие автономные платформы |
| Тактические МЭМС | 0.05 – 0.1 | Оборонные БПЛА, стабилизация оружия, транспортные средства |
| FOG навигационного класса | 0.001 – 0.01 | Морские, аэрокосмические, железнодорожные, БПЛА большой продолжительности полета |
| Стратегический RLG | < 0.001 | Подводные лодки, МБР, высокозащищенные военные системы |
Я отношусь к ARW как к фильтру, ограничивающему принятие проектных решений.
Если моей системе нужно выдержать 30 минут без ГНСС и поддерживать точность курса 1°, то МЭМС-модули с точностью 0,2°/√ч просто не справятся. Тактические МЭМС-модули едва ли справятся. Если же мне нужна производительность выше, то либо FOG, либо ничего.
Что будет дальше?
К настоящему моменту вы должны иметь чёткое представление о том, что такое ARW, как он измеряется и почему он важен. Но теория — это лишь половина дела. Во второй части этой серии я расскажу, как ARW проявляется в реальных системах — от дрейфа БПЛА до инерциальных миссий — и как инженеры, такие как мы, разрабатывают решения, учитывающие это. Мы рассмотрим тактические вопросы: программные ограничения, механическую изоляцию, стратегии термоядерного синтеза и жёсткие пороговые значения ARW для критически важных приложений.
→ Перейти к части 2: Проектирование с учетом ARW
