Теоретически, инерциальный измерительный блок (IMU) может выполнять одометрию — измерение пройденного транспортным средством расстояния, суммируя его ускорение и угловую скорость с течением времени. Однако в реальности такая «только инерциальная одометрия» непрактична. Проблема заключается в накоплении ошибок : даже незначительные отклонения датчиков приводят к дрейфу положения, который экспоненциально растёт со временем. Уже через несколько секунд расчётная траектория начинает сильно отличаться от реальной.
Для автономного вождения и робототехники, где точность локализации должна оставаться в пределах сантиметров, один лишь инерциальный измерительный блок просто не может обеспечить надежную одометрию.
Теоретически инерциальный измерительный блок (ИИБ) может вычислять одометрию методом двойного интегрирования, но смещение и шум приводят к экспоненциальному дрейфу показаний с течением времени. Поэтому реальные навигационные системы используют слияние ИИБ с ГНСС, лидаром или камерами для поддержания точности и стабильности.
Инерциальная навигация кажется простой: измеряйте движение и рассчитывайте расстояние. Но на практике даже небольшие ошибки датчиков быстро растут и снижают точность. Инерциальный измерительный блок (IMU) — важнейшая часть любой навигационной системы, но он не может работать в одиночку. В этой статье объясняется, почему чистая одометрия с помощью IMU неэффективна и как сочетание датчиков превращает её в надёжный инструмент для точного позиционирования.

Оглавление
Почему IMU теоретически может выполнять одометрию
Инерциальный измерительный блок (ИИБ) измеряет ускорение по трем осям и угловую скорость по трем осям .
Благодаря непрерывной интеграции этих сигналов система теоретически может вычислить:
- Ориентация (положение): путем интегрирования угловой скорости.
- Скорость: путем интегрирования линейного ускорения.
- Положение: путем повторного интегрирования скорости.
Это фундаментальный принцип инерциальной навигационной системы (ИНС) — автономного метода навигации, основанного исключительно на датчиках движения. В идеальном случае, при идеальной калибровке датчиков и отсутствии помех, инерциальный измерительный блок (IMU) может непрерывно определять движение транспортного средства и оценивать его траекторию относительно начальной точки. Поэтому теоретически инерциальный измерительный блок (IMU) может выполнять одометрию без какой-либо внешней опорной точки.
Почему это не работает на практике: проблема накопления ошибок
Хотя теория и логична, каждый инерциальный измерительный блок (ИИБ) страдает от внутренних погрешностей датчиков . Эти небольшие смещения и шумы значительно увеличиваются в процессе двойного интегрирования , преобразующего ускорение в положение. Со временем даже незначительные несовершенства приводят к значительному и быстро растущему дрейфу.
Ошибка позиционирования растет квадратично со временем
Если акселерометр содержит небольшое постоянное смещение b a (м/с²), накопленные ошибки скорости и положения увеличиваются со временем как:
Это означает, что ошибка определения местоположения растёт пропорционально квадрату времени . Даже небольшое смещение может привести к значительному дрейфу.
Например, предположим, что смещение акселерометра составляет 0,01 м/с2 — весьма типичное значение для коммерческих MEMS-IMU.
| Время | Ошибка положения |
|---|---|
| 1 с | 0,005 м |
| 10 с | 0,5 м |
| 30 с | 4,5 м |
| 60 с | 18 м |
Уже после одной минуты (60 с) работы расчетная ошибка определения местоположения может составить около 18 метров , что значительно превышает точность локализации, необходимую для автономного вождения ( обычно < 0,1–0,3 м ).
Смещение гироскопа приводит к изменению положения
Небольшое смещение гироскопа может показаться незначительным, но со временем оно приводит к заметным ошибкам в оценке положения . Как только ориентация смещается, инерциальный измерительный блок (IMU) перестает корректно отделять силу тяжести от истинного движения — он не может «удалить силу тяжести» из данных акселерометра. В этом случае часть вектора силы тяжести ошибочно воспринимается как горизонтальное ускорение , заставляя систему считать, что аппарат движется, даже если он неподвижен. Это ложное ускорение продолжает интегрироваться в ложную скорость и в конечном итоге приводит к взрывному дрейфу положения .
Другие источники ошибок
Помимо предвзятости, на реальные инерциальные измерительные приборы влияют многочисленные источники ошибок, которые усиливаются со временем:
| Источник ошибки | Влияние |
|---|---|
| Ошибка масштабного коэффициента | Неправильное масштабирование измерений ускорения или угловой скорости. |
| Несоосность | Неортогональные оси датчика приводят к ошибкам проецирования. |
| Температурный дрейф | Смещение смещается в зависимости от температуры, что ухудшает калибровку. |
| Вибрационный шум | Механический шум интегрируется в дрейф положения. |
| Первоначальная ошибка выравнивания | Небольшие ошибки в отношении к старту приводят к долгосрочным отклонениям. |
Даже небольшие несовершенства в совокупности приводят к быстрому расхождению навигационных данных. На практике чистая инерциальная одометрия становится непригодной к использованию уже через несколько секунд , даже для высококачественных датчиков.
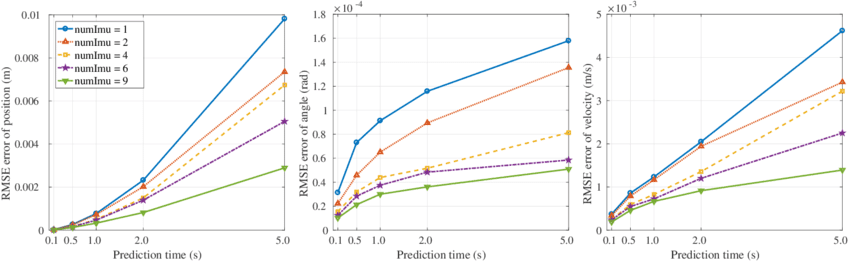
Оценка точности: как долго может служить одометрия, основанная только на IMU
Даже с использованием современных датчиков инерциальная одометрия может оставаться точной лишь в течение короткого периода времени, прежде чем выйти из-под контроля. Поскольку погрешность позиционирования увеличивается квадратично со временем, продолжительность надежной работы в основном зависит от класса инерциального измерительного блока и стабильности его смещения.
| Оценка ИДУ | Типичная предвзятость | Ошибка положения (10 с) | Ошибка положения (60 с) | Практическое использование |
|---|---|---|---|---|
| Потребительский класс | > 0,01 м/с² | > 0,5 м | > 18 м | Полностью непригоден для использования |
| Промышленный класс | ~ 0,001 м/с² | ~ 5 см | ~ 1,8 м | Можно использовать только для коротких тестов. |
| Навигация | < 0,0001 м/с² | ~ 0,5 см | ~ 18 см | Точен в течение нескольких секунд; все еще требует слияния |
| Тактический уровень | Крайне низкий | Управляемый | Несколько метров | Пригоден для использования в военной/аэрокосмической промышленности; высокая стоимость |
Даже самые высококлассные инерциальные измерительные блоки (ИИБ) не могут полностью избежать дрейфа. Именно поэтому современные автономные системы всегда используют комплексное использование данных датчиков — комбинирование данных ИИБ с данными ГНСС, лидара или визуальными данными — для поддержания долгосрочной точности и стабильности.
Роль инерциального измерительного блока (IMU) в современной навигации: в основе лежит сочетание датчиков
Хотя инерциальный измерительный блок (IMU) не может самостоятельно выполнять одометрию, он играет незаменимую роль в современной навигации. Вместо того, чтобы быть основным источником данных о местоположении, он выступает в качестве высокочастотной опоры , дополняющей и стабилизирующей работу других датчиков.
Оценка высокочастотного движения
Инерциальные измерительные блоки работают на сотен до тысяч герц , что намного быстрее, чем ГНСС, лидары или камеры.
Такая высокая частота обновления позволяет им улавливать быстрое движение и заполнять пробелы между более медленными датчиками, обеспечивая плавное и непрерывное отслеживание движения для всей навигационной системы.
Краткосрочное прогнозирование и сглаживание
При потере сигналов ГНСС — внутри туннелей, под мостами или в густонаселенных городских районах — инерциальный измерительный блок (IMU) обеспечивает краткосрочное счисление пути для поддержания непрерывной траектории.
Он прогнозирует состояние системы (положение, скорость, ориентацию) на несколько секунд, обеспечивая плавные переходы до тех пор, пока внешние измерения снова не станут доступны.
Благодаря этой способности выполнять функцию моста, инерциальный измерительный блок (IMU) становится незаменимым средством для надежной навигации в условиях отсутствия приема сигналов ГНСС .
Ядро слияния датчиков
В современных системах локализации инерциальный измерительный блок (ИИБ) выступает в качестве динамического ядра многосенсорных систем слияния данных. Его высокоскоростные инерциальные данные обеспечивают непрерывную информацию о движении, в то время как низкоскоростные, но бездрейфовые измерения от других датчиков, таких как ГНСС, лидар или камеры, постоянно корректируют накопленные ошибки, обеспечивая стабильность и точность навигации.
| Метод слияния | Комбинация датчиков | Приложение |
|---|---|---|
| Слабое или сильное соединение GNSS/IMU | RTK-GNSS + IMU | Высокоточная наземная и воздушная навигация |
| Визуально-инерциальная одометрия (ВИО) | Камера + ИМУ | SLAM, БПЛА, робототехника |
| Лидар-инерциальная одометрия (ЛИО) | Лидар + ИМУ | Автономное вождение, картографирование |
| Факторный граф или слияние фильтров Калмана | Несколько датчиков + ИМУ | Комплексная оценка состояния |
Заключение
Теоретически инерциальный измерительный блок (ИИБ) может самостоятельно оценить движение, но на практике его ошибки растут слишком быстро, чтобы быть полезными. Даже незначительные отклонения быстро приводят к дрейфу положения на несколько метров за секунды.
Тем не менее, инерциальный измерительный блок (IMU) остаётся незаменимым: он предоставляет высокочастотные данные о движении, недоступные другим датчикам. В сочетании с ГНСС, лидаром или камерами он становится основой стабильной и точной навигационной системы.
