Устранение сбоев ГНСС в сельскохозяйственных роботах: стратегии расчета пути ИНС
Система счисления пути INS позволяет сельскохозяйственным роботам сохранять курс при потере сигнала GNSS. Благодаря стабильному смещению гироскопа, низкому дрейфу и сочетанию датчиков, использующих одометрию колёс и гравитационное выравнивание, автономные тракторы могут поддерживать точность рядов даже под навесом, в амбарах или вблизи металлических конструкций.
Как справиться с температурным дрейфом гироскопа IMU?

Температурный дрейф инерциального измерительного блока (IMU) является основной причиной снижения точности инерциальных систем. Оптимизация аппаратного обеспечения, полнодиапазонная температурная калибровка и онлайн-компенсация позволяют инженерам значительно уменьшить дрейф и обеспечить стабильность позиционирования.
Как гироскопы и акселерометры влияют на производительность инерциального измерительного блока

Стабильность инерциального измерительного блока (ИИУ) зависит от объединения данных гироскопа и акселерометра. Гироскопы дрейфуют, акселерометры шумят, и дополнительный фильтр объединяет их для обеспечения надёжной и лёгкой оценки положения в реальном времени.
Кварцевый акселерометр против МЭМС-акселерометра

Кварцевые акселерометры обеспечивают превосходную долговременную точность и стабильность, а МЭМС-акселерометры — компактность, долговечность и экономичность. Правильный выбор зависит от требований к точности вашего проекта, бюджета и условий окружающей среды.
Почему условия тестирования определяют истинное значение характеристик инерциального измерительного блока
Условия тестирования инерциального измерительного блока определяют реалистичность и достоверность его характеристик. Температура, вибрация, продолжительность и фильтрация — всё это формирует заявленные в техническом описании данные и фактические характеристики датчика.
Применение инерциального измерительного блока MEMS в роботах для осмотра трубопроводов
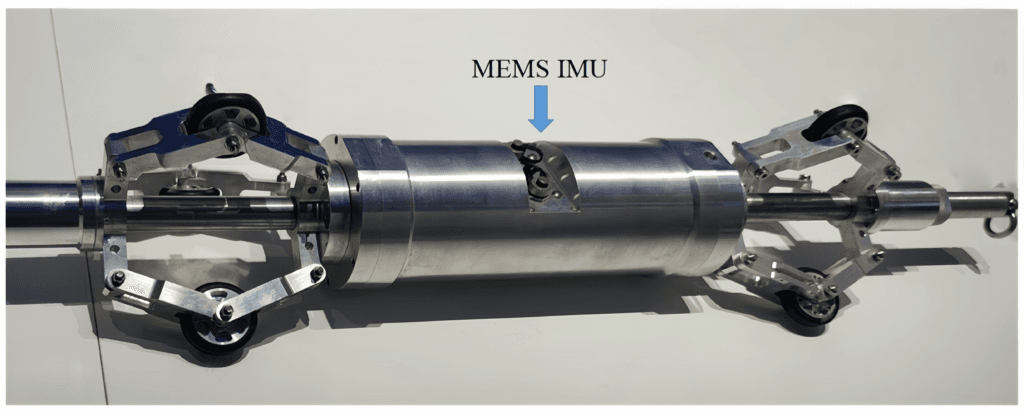
Инерциальные измерительные блоки (ИМБ) на основе МЭМС обеспечивают точную инерциальную навигацию для роботов-инспекторов трубопроводов, работающих в условиях отсутствия ГНСС. Предоставляя стабильные данные о положении, скорости и местоположении, они обеспечивают надежное картирование дефектов, плавное управление траекторией и непрерывную работу в закрытых подземных или подводных трубопроводах.
Скрытые ловушки при использовании высокоточных МЭМС-инерциальных измерительных блоков: что должен знать каждый интегратор

Высокоточные инерциальные измерительные блоки (ИМБ) на основе МЭМС обеспечивают непревзойденную производительность обнаружения движения, но только при правильном использовании. В статье рассматриваются четыре критические ошибки, которые часто приводят к потере точности, а также способы их предотвращения при интеграции в реальных условиях.
Преимущества и недостатки MEMS IMU Honeywell HG1930
Honeywell HG1930 — компактный тактический инерциальный измерительный блок на основе МЭМС, обеспечивающий надежную работу и прочную конструкцию для беспилотных летательных аппаратов, робототехники и оборонных систем. Он обеспечивает стабильную точность в суровых условиях, но имеет более высокую стоимость и экспортные ограничения.
Технология локализации на базе ИНС, лежащая в основе автономного вождения
Автономные транспортные средства достигают точности на уровне сантиметров за счет интеграции ГНСС/ИНС, картографирования LiDAR и визуального восприятия, при этом высокоточные инерциальные измерительные блоки (IMU) формируют ядро локализации в случае потери сигнала GPS.
Может ли IMU самостоятельно выполнять одометрию?

Теоретически инерциальный измерительный блок (ИИБ) может вычислять одометрию методом двойного интегрирования, но смещение и шум приводят к экспоненциальному дрейфу показаний с течением времени. Поэтому реальные навигационные системы используют слияние ИИБ с ГНСС, лидаром или камерами для поддержания точности и стабильности.