Инерциальные датчики по своей природе несовершенны. Дрейф смещения, случайное блуждание и температурная чувствительность — это не аномалии, а ожидаемое поведение. Важно не устранять эти ошибки, а управлять ими.
За прошедшие годы я усвоил, что надёжность инерциальной навигации зависит не только от характеристик датчика, но и от того, насколько хорошо вы понимаете и компенсируете эти недостатки. Независимо от того, используете ли вы МЭМС или ВОГ, успех зависит от того, что происходит после того, как датчик начинает передавать данные.
инерциальной навигации в конечном итоге ограничена качеством моделирования и компенсации ошибок датчиков. Эффективное устранение любых ошибок, от смещения смещения до случайного блуждания , требует сочетания аппаратного обеспечения, процедур калибровки и алгоритмической коррекции в реальном времени.
Инерциальная навигация не ограничивается исключительно аппаратным обеспечением. Производительность оборудования задаёт нижний предел, но верхний предел определяется эффективностью обработки ошибок.
Оглавление
Почему компенсация ошибок является настоящим узким местом в INS?
Инерциальные навигационные системы обычно не выходят из строя внезапно — они постепенно деградируют . То, что начинается с небольшого смещения гироскопа или небольшого смещения акселерометра, постепенно превращается в растущую ошибку определения положения, скорости и положения . Я видел, как точность инерциальной навигации (ИНС) сходила с уровня менее метра и становилась непригодной для использования за считанные минуты — не из-за неисправности датчиков, а из-за того, что ошибка не была устранена .
Независимо от того, насколько точным ваш инерциальный измерительный блок (IMU) заявлен на бумаге, некомпенсированная инерциальная система (INS) всегда будет дрейфовать . А в условиях отсутствия ГНСС этот дрейф становится критически важным. Эффективная компенсация — это не бонус, а основа надёжной инерциальной системы (INS) .
Категоризация ошибок INS: что можно моделировать, а что нельзя
Работая с инерциальными навигационными системами, я первым делом обращаю внимание на то, как ошибки ведут себя с течением времени. Некоторые из них предсказуемы, другие — нет. И это различие имеет большое значение при компенсации.
Систематические ошибки: предсказуемые и исправимые
Если их не корректировать, они повторяются во времени и при разных температурах:
- Дрейф смещения в гироскопах и акселерометрах
- Нелинейность масштабного фактора
- Небольшие несоосности между осями датчиков
- Температурная чувствительность, которая изменяет выходной сигнал в зависимости от окружающей среды
При наличии надежной процедуры калибровки эти ошибки обычно можно измерить один раз и последовательно компенсировать — до тех пор, пока ваши условия остаются в пределах допустимых значений.
Случайные ошибки: непредсказуемые, но поддающиеся описанию
Существуют ошибки, которые невозможно устранить, а можно только смоделировать. К ним относятся:
- Угловое случайное блуждание (ARW)
- Случайное блуждание по скорости (VRW)
- Датчик белого шума
- Артефакты, вызванные вибрацией, особенно на мобильных платформах
Вывод: систематические ошибки устраняются в лаборатории. Случайные ошибки устраняются в полевых условиях.
Как ошибки ИНС распространяются со временем?
Прежде чем говорить о компенсации, важно понять, как ошибки ведут себя внутри ИНС. Они не просто появляются — они растут, накапливаются и взаимодействуют с динамикой системы способами, которые часто недооцениваются. Давайте разберёмся, как это происходит.
Небольшие ошибки не остаются незначительными.
В инерциальной навигационной системе даже небольшое смещение гироскопа или ошибка ускорения в пределах микроперегрузки со временем будут увеличиваться. Это связано с тем, что ИНС работает, интегрируя данные датчиков, а это означает, что любая ошибка накапливается на каждом этапе.
Интеграция – это множитель.
Дрейф ориентации влияет на скорость. Ошибка скорости, в свою очередь, влияет на положение. Эта цепная реакция объясняет, почему система с, казалось бы, хорошими характеристиками на бумаге может смещаться на сотни метров после 30 минут подавления сигнала ГНСС.
Профиль движения имеет значение. Очень большое.
Способ движения вашей системы будет определять, какие ошибки будут преобладать. На статических платформах решающую роль играют долговременное смещение и тепловой дрейф. В высокодинамичных системах, таких как дроны, ракеты или скоростные вездеходы, нелинейность масштабного коэффициента и временная задержка становятся более критичными, чем само смещение.
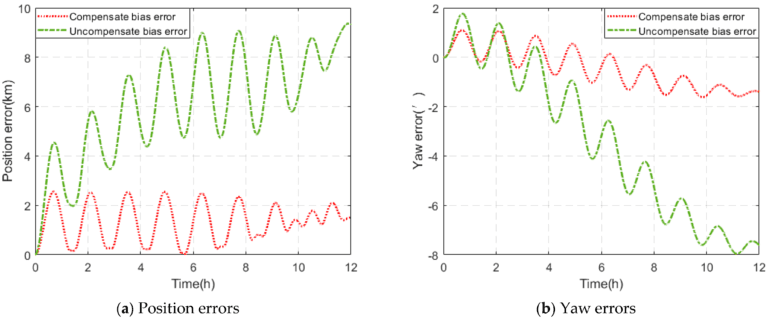
Длительные миссии все усиливают.
Независимо от того, идет ли речь о 12-часовом маршруте исследования или 2-минутном полете ракеты, чем дольше ваша ИНС работает без коррекции, тем важнее становится моделирование ошибок.
Моделирование ошибок датчиков для эффективной компенсации
Прежде чем что-либо корректировать в ИНС, необходимо понимать, что именно корректируется. Смещение, дрейф и шум датчика — это не ошибки, а особенности его поведения. И если вы не смоделируете их должным образом, ваша стратегия компенсации будет лишь догадкой.
Обычно я использую четыре ключевых метода моделирования. Каждый из них ориентирован на разные типы ошибок, и вместе они дают чёткое представление о том, как будет вести себя ваша система — не только в лабораторных, но и в реальных условиях.
| Метод моделирования | Основная цель | Типы исправленных ошибок | Почему это важно |
|---|---|---|---|
| Аллан Варианс | Проанализируйте, как шум датчика меняется с течением времени | ARW, нестабильность смещения, случайный дрейф | Необходим для настройки фильтров и оценки датчиков |
| Шестипозиционная калибровка | Оценить фиксированные смещения и несоответствия | Смещение, масштабный коэффициент, несоосность осей | Обеспечивает точное удаление статических ошибок |
| Тепловая калибровка | Изменение выходных данных карты в зависимости от температуры | Смещение и дрейф усиления, вызванные температурой | Критически важно для реальных наружных и мобильных платформ |
| Анализ PSD | Понимание шума датчика по частоте | Белый шум, низкочастотное блуждание | Информирует о конструкции фильтра, не подавляя реальное движение |
Совет: объедините как минимум три из этих методов, прежде чем доверить своей ИНС любую длительную или запрещенную ГНСС миссию.
Аппаратные методы устранения ошибок
Хорошее программное обеспечение не спасёт плохое оборудование. В инерциальных навигационных системах выбор механических, тепловых и электрических характеристик напрямую влияет на долгосрочную стабильность . Это основные методы, которые я использую для создания надёжных платформ инерциальных навигационных систем.
- Виброизоляция имеет важное значение.
Неотфильтрованная механическая вибрация создаёт ложные сигналы движения. Использование настроенных изоляторов или правильно демпфированных креплений датчиков может значительно снизить высокочастотный шум, особенно на гусеничных транспортных средствах или винтокрылых машинах.
- Температурная последовательность обеспечивает точность калибровки.
Выходной сигнал датчика дрейфует в зависимости от температуры. Пассивная изоляция или активный обогрев могут помочь поддерживать рабочую температуру в заданном диапазоне.
- Шум питания становится шумом сигнала.
Пульсации напряжения и электромагнитные помехи вызывают скрытые, но устойчивые искажения аналоговых и цифровых сигналов. Я всегда использую чистые шины питания, малошумящие стабилизаторы и строгое разделение аналоговых и цифровых сигналов.
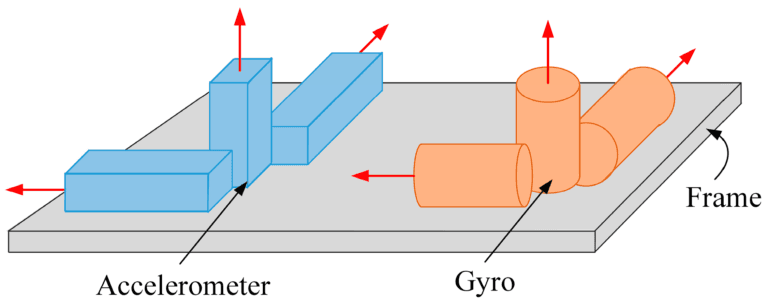
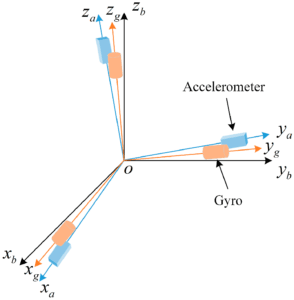
- Точность монтажа влияет на выравнивание.
Даже незначительные механические смещения могут привести к значительным ошибкам в положении и скорости. Используйте жёсткие, обработанные на станке кронштейны и тщательно контролируйте ориентацию и крутящий момент инерциального измерительного блока (IMU).
- Используйте датчики, соответствующие миссии.
Не просто выбирайте «лучший» датчик — выберите тот, который соответствует вашему бюджету погрешности. При длительных сбоях ГНСС стабильность смещения имеет первостепенное значение. Для быстрых платформ приоритет имеют низкий ARW и пропускная способность.
Итог: наилучшие инерциальные характеристики начинаются задолго до сбора данных — с того, как вы прикрепите датчик к раме.
Программные методы компенсации
Как только аппаратное обеспечение стабилизируется, программное обеспечение берёт на себя управление. Именно здесь происходит большая часть контроля дрейфа , и именно здесь хорошая модель может заставить скромный датчик работать как отличный. Вот как я это делаю на практике:
- Начните с правильной калибровки.
Используйте статические и динамические процедуры для измерения смещения, масштабного коэффициента, несоосности и температурного отклика. Без надёжной базовой линии калибровки всё остальное — лишь догадки.
- Используйте фильтры, соответствующие вашей динамике.
Фильтры Кальмана с расширенным фильтром (EKF), фильтры Кальмана без запаха (UKF) или дополнительные фильтры — выбирайте их в зависимости от своего профиля движений и доступных источников вспомогательной энергии. Неправильная структура фильтра хуже, чем его полное отсутствие.
- Температурная компенсация не подлежит обсуждению.
Независимо от того, используете ли вы FOG- или MEMS-инерциальный измерительный блок (IMU), поведение датчика меняется в зависимости от температуры. Коррекция в реальном времени с помощью внутренних или внешних датчиков температуры может уменьшить дрейф на порядок.
- Адаптивная фильтрация повышает выживаемость.
В многоэтапных миссиях (например, запуск, крейсерский полёт, спуск) характеристики шума датчиков меняются. Адаптивная настройка фильтра на основе данных о скорости, вибрации или окружающей среде позволяет вашей системе адаптироваться по мере необходимости.
- Коррекция с замкнутым контуром сохраняет ограничения.
Используйте обновления данных ГНСС, одометрии, барометра или магнитометра, чтобы ограничить рост погрешности. Даже низкая скорость коррекции каждые несколько секунд значительно повышает производительность при выполнении длительных задач.
Самое главное: программное обеспечение не может обеспечить точность, но оно может её защитить , улучшить и восстановить в случае сбоя. Именно это и должна уметь хорошая система INS.
Роль слияния датчиков в подавлении дрейфа ИНС
Даже самая лучшая инерциальная навигационная система будет смещаться — это не недостаток, это физика . Вопрос в том, как ограничить этот дрейф с помощью других датчиков. Именно здесь сочетание датчиков становится самым мощным инструментом в системе.
ГНСС + ИНС: классическое решение
Если ГНСС доступна, даже с перерывами, она обеспечивает абсолютные обновления местоположения, позволяющие ограничить дрейф инерциальной навигации.
Подходит для: длительных миссий, мобильного картографирования, беспилотных летательных аппаратов
Преимущество: точные исправления, зрелые фильтры (EKF)
Внимание: уязвимость к помехам, пропаданию сигнала и многолучевому распространению
Гибрид FOG + MEMS: баланс между точностью и стоимостью
Сочетание стабильного FOG с отзывчивой MEMS дает вам лучшее из обоих миров — низкий дрейф и быструю реакцию.
Лучше всего подходит для: БПЛА среднего размера, морских платформ, роботизированных систем.
Преимущество: лучший ARW + меньший SWaP
Внимание: требуется тщательная интеграция и кросс-калибровка.
Vision / LiDAR + INS: непрерывность без ГНСС
Визуальная одометрия или LiDAR SLAM могут предоставить данные об относительном положении объекта, когда ГНСС недоступна, например, в помещении или под землей.
Лучше всего подходит для: беспилотных автомобилей, туннелей, складов, шахт
Преимущество: полная автономность
Внимание: требуется прямая видимость, чувствителен к освещению или плотности объектов
Время — это всё. Fusion работает только при синхронизированных датчиках. Несовпадение временных меток приносит больше вреда, чем пользы.
На практике: суть Fusion не в добавлении новых датчиков, а в понимании того, какому из них доверять в нужный момент.
Подход GuideNav к надежности ИНС
После всего, что я видел в полевых условиях — на БПЛА, исследовательских аппаратах, морских системах — одно остается неизменным: реальная эффективность ИНС зависит от всего, что связано с датчиком .
В GuideNav мы фокусируемся именно на этом.
- Каждое устройство полностью калибруется по температуре и осям , а не просто проходит партийные испытания.
- Мы предоставляем реальные данные дисперсии Аллана и поддержку в настройке фильтров, а не только технические характеристики.
- Наши модели FOG и MEMS поставляются с готовыми к использованию инструментами интеграции : стабильной синхронизацией, чистыми интерфейсами и поддержкой слияния.
- А поскольку мы не подпадаем под действие ITAR , наши системы готовы к глобальному развертыванию в оборонных, промышленных или исследовательских программах.
Вы получаете не просто датчик — вы получаете навигационную платформу, которой можно доверять, когда другие системы отказывают.