Автономные транспортные средства не могут безопасно передвигаться, не зная своего точного местоположения, однако обычный GPS с его погрешностью 1–3 метра слишком груб для принятия решений на уровне полосы движения. В городских каньонах или туннелях сигналы полностью исчезают, оставляя систему «слепой». Для достижения точности на уровне сантиметров современные беспилотные платформы используют комплексное использование данных нескольких датчиков, сочетая ГНСС, инерциальный измерительный блок, лидар и визуальное восприятие, что обеспечивает непрерывное и надежное определение местоположения в любых условиях движения.
Автономные транспортные средства достигают точности на уровне сантиметров за счет интеграции ГНСС/ИНС, картографирования LiDAR и визуального восприятия, при этом высокоточные инерциальные измерительные блоки (IMU) формируют ядро локализации в случае потери сигнала GPS.
Локализация — невидимая основа автономного вождения. Она точно определяет местоположение автомобиля, даже если спутники пропадают. Объединяя данные инерциального измерительного блока (IMU), ГНСС, лидара и камер, современные системы поддерживают точное позиционирование на любой дороге, в любом туннеле и в любом городском каньоне.
Оглавление
Основные технологии автономной локализации
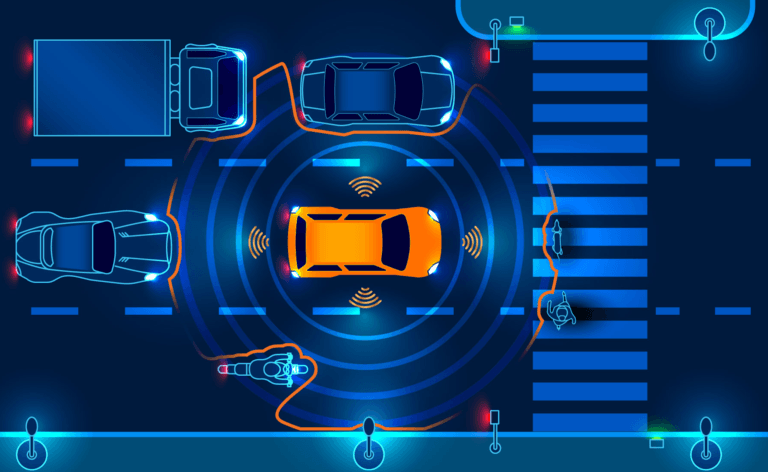
Современная локализация автономного вождения сочетает в себе четыре основные технологии датчиков, каждая из которых играет уникальную роль в восприятии и навигации:
- GNSS (глобальная навигационная спутниковая система): обеспечивает глобальные координаты и абсолютную привязку к местоположению.
- Инерциальная навигационная система (ИНС): отслеживает движение с помощью акселерометров и гироскопов, устраняя пробелы в сигналах ГНСС.
- LiDAR (обнаружение света и определение дальности): создает трехмерные карты окружающей среды для пространственного сопоставления с точностью до сантиметра.
- Системы зрения: используют камеры для распознавания дорожной разметки, дорожных знаков и ориентиров для семантического понимания.
Вместе эти системы создают избыточную, взаимодополняющую архитектуру , которая обеспечивает точное определение местоположения в сложных дорожных, погодных и освещённых условиях. Однако среди них отправной точкой остаётся ГНСС
Почему GNSS сама по себе не может сделать автомобили автономными
Стандартная система GPS точность всего — приемлемо для телефонов, но критически важно для беспилотных автомобилей . Даже небольшой занос может привести к пересечению полосы движения или неправильному распознаванию поворота.
В городских каньонах и туннелях сигналы отражаются или полностью исчезают, создавая хаотичные скачки сигнала, известные как ошибки многолучевого распространения . Эти пробелы делают чистый GPS ненадёжным, доказывая, что автономным системам необходимо сочетание датчиков для непрерывной локализации с точностью до сантиметра .
Повышение точности GNSS для автономного вождения
Для улучшения стандартных GPS автономные системы используют усовершенствованные методы коррекции GNSS , такие как RTK . Получая данные об ошибках в режиме реального времени от референцных станций , эти системы могут достигать точности 5–10 см , что позволяет определять местоположение на уровне полосы движения .
Однако GNSS по-прежнему зависит от ясной видимости и стабильной связи . В туннелях или городских районах сигналы ухудшаются или исчезают, что доказывает, что одного лишь спутникового позиционирования недостаточно для непрерывной локализации требуется поддержка со стороны INS .
При отказе ГНСС система ИНС информирует транспортное средство
Когда спутники исчезают, инерциальная навигационная система (ИНС) . Используя бортовой инерциальный измерительный блок (ИИБ) , она отслеживает движение по ускорению и угловой скорости, что позволяет аппарату точно определять своё местоположение даже без внешних сигналов.
Эта независимость делает ИНС своего рода мостом через туннели, подземные переходы и городские каньоны. Однако со временем ошибки накапливаются, вызывая постепенное смещение . Для обеспечения точности ИНС должна постоянно корректироваться с помощью ГНСС или других датчиков, таких как лидар и камеры .
Внутри ИНС: ядро инерциальной локализации
Инерциальная навигационная система (ИНС) является основой автономной локализации — автономного навигационного решения, позволяющего транспортным средствам отслеживать свое местоположение, скорость и положение в пространстве даже при исчезновении внешних сигналов.
Что входит в состав INS?
- Набор из трех гироскопов измеряет угловую скорость для фиксации вращательного движения.
- Комплект из трех акселерометров измеряет линейное ускорение по всем осям.
- Вместе эти датчики образуют инерциальный измерительный блок (IMU) , который непрерывно отслеживает каждое незначительное движение транспортного средства в режиме реального времени.
Как работает INS
Интегрируя измерения инерциального измерительного блока (IMU), система INS рассчитывает положение, скорость и местоположение относительно исходной точки отсчёта. Даже при исчезновении сигналов ГНСС система продолжает оценивать движение с помощью счисления пути , обеспечивая плавный и непрерывный вывод данных о местоположении.
Почему качество INS имеет значение
Точность инерциальной системы позиционирования (ИНС) зависит от характеристик датчика, включая стабильность смещения , случайный блуждание по углу (ARW) и температурную компенсацию . Высококачественная инерциальная система позиционирования (ИНС) обеспечивает точность менее метра в течение длительного времени в условиях отсутствия ГНСС , обеспечивая стабильную навигацию в туннелях, городах и на проложенных маршрутах.
Слияние ИНС и ГНСС: золотой стандарт отрасли
Дополнительные сильные стороны
Ни одна из систем не может работать идеально в одиночку.
Система GNSS обеспечивает глобальное позиционирование, но ее надежность снижается при наличии помех в сигнале, в то время как система INS обеспечивает непрерывное отслеживание движения, которое со временем постепенно смещается.
Объединяя оба этих фактора, автономные транспортные средства достигают абсолютной точности и краткосрочной стабильности .
Fusion в действии
Благодаря усовершенствованной фильтрации Калмана данные от GNSS и INS объединяются в реальном времени:
- При наличии ГНСС она непрерывно корректирует дрейф ИНС.
- При потере сигнала ГНСС система ИНС сохраняет точные данные о движении до тех пор, пока не вернутся сигналы со спутника.
Этот цикл прогнозирования-обновления обеспечивает бесперебойную и надежную локализацию — даже в туннелях или густонаселенных городских каньонах.
Промышленный стандарт
Эта интеграция стала краеугольным камнем современной автономной навигации .
Хорошо откалиброванная система GNSS/INS обеспечивает точность на уровне сантиметров в динамических условиях, гарантируя как точность, так и надежность в любых условиях вождения.
От координат к реальности: как работает локализационная математика
Точная локализация зависит от преобразования данных между двумя системами координат — системой координат транспортного средства , которая движется вместе с автомобилем, и системой координат карты , связанной с Землей. С помощью матриц вращения или кватернионов данные датчиков, такие как ускорение и угловая скорость, преобразуются в глобальную систему координат. Без такого выравнивания даже точные датчики будут неправильно считывать движение, что приведёт к дрейфу и позиционным ошибкам.
Роль лидара в обеспечении точности на уровне сантиметра
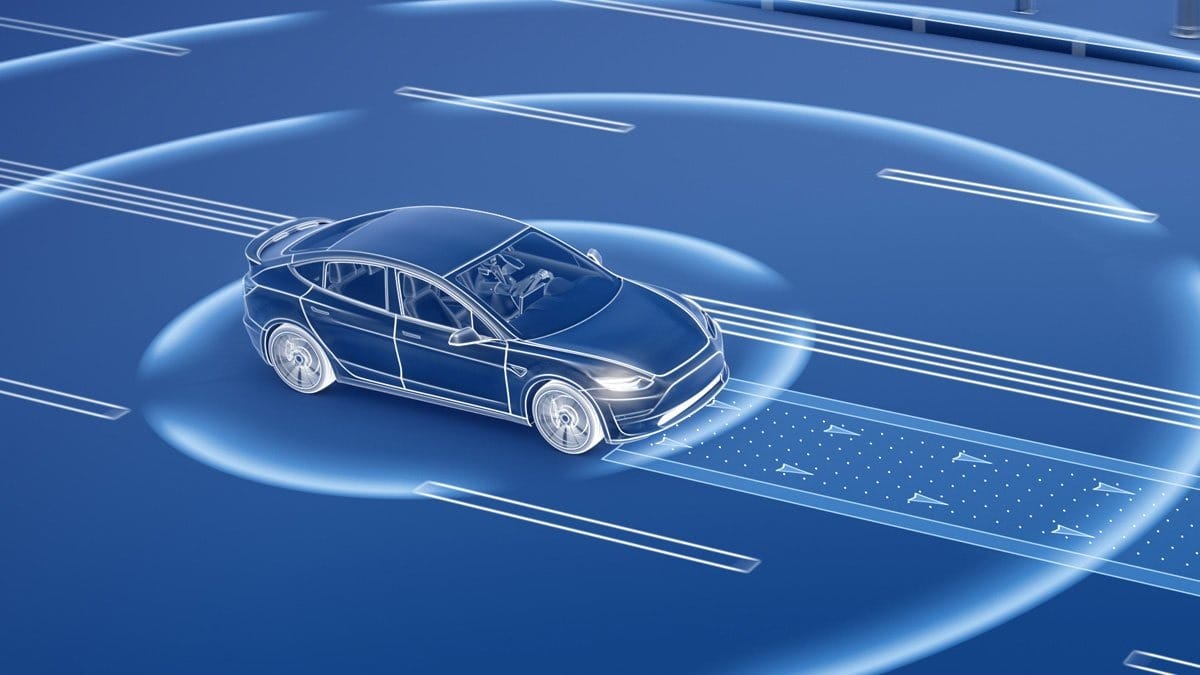
Когда ГНСС теряет видимость, на смену приходит LiDAR.
В отличие от спутникового позиционирования, локализация LiDAR использует 3D-сканирование в реальном времени, чтобы «видеть» окружающую среду вокруг транспортного средства.
Как это работает:
- Лидар непрерывно излучает лазерные импульсы для создания облаков точек .
- Эти сканы сопоставляются с картой высокой четкости с использованием таких алгоритмов, как ICP (итеративное приближение к ближайшей точке) или NDT (преобразование нормального распределения) .
- положение и ориентацию транспортного средства с точностью до сантиметра.
Почему это важно:
Эта технология обеспечивает последовательную локализацию в туннелях , городских каньонах или лесных дорогах , где сигналы GNSS ненадежны или полностью теряются.
Увидеть — значит поверить: визуальная локализация и картографирование на уровне полос движения
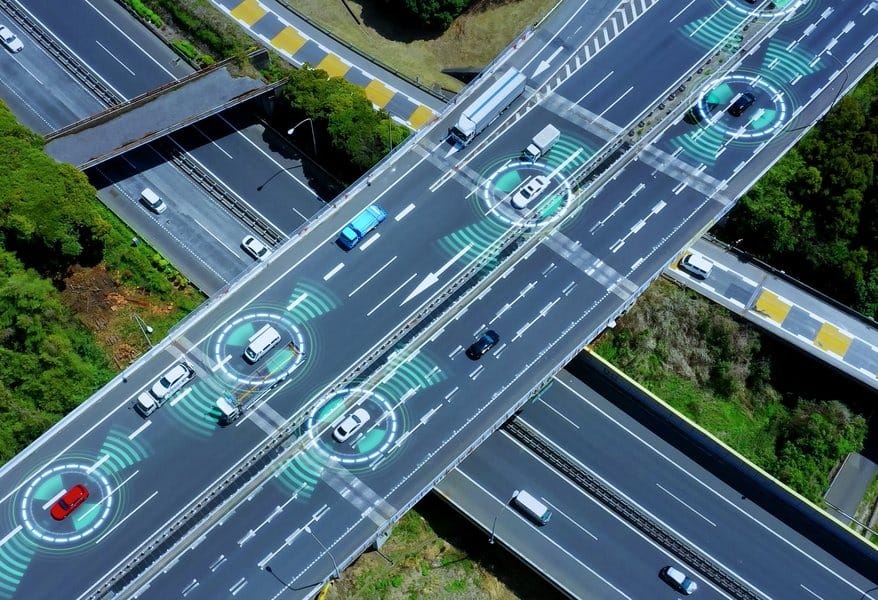
По мере развития систем автономного вождения визуальная локализация стала незаменимым дополнением к ГНСС и лидару. Спутники обеспечивают глобальный охват, а лидар — геометрическую точность, а камеры добавляют контекст и значение , позволяя автомобилям интерпретировать окружающую обстановку так же, как это делают люди.
Роль зрения в локализации
Визуальные датчики обеспечивают семантическое понимание автономной навигации. Камеры фиксируют разметку полос движения , дорожные знаки и границы дорог , предоставляя богатый контекст, выходящий за рамки геометрии.
Основной процесс
Полученные изображения сравниваются с картой высокой чёткости . Алгоритмы анализируют визуальные особенности и применяют вероятностную оценку (например, фильтрацию частиц) для определения наиболее вероятного местоположения транспортного средства.
Главное преимущество
В отличие от лидара, который измеряет форму, визуальная локализация интерпретирует значение. Она обеспечивает точность на уровне полосы движения и повышает надёжность в условиях меняющегося освещения, дорожного движения и погодных условий.
Какие проблемы по-прежнему ограничивают локализацию в реальном мире?
Даже при современном сочетании ГНСС, инерциального измерительного блока, лидара и машинного зрения, реальная локализация по-прежнему сталкивается с серьёзными практическими трудностями. Идеальная точность в лабораторных условиях не всегда гарантирует непредсказуемость дорожного движения.
Динамические среды
Дорожное строительство, припаркованные автомобили, пешеходы и временные объекты создают несоответствия между данными датчиков в режиме реального времени и готовыми картами. Эти несоответствия могут привести к краткосрочным ошибкам позиционирования.
Обслуживание карты
Карты высокого разрешения требуют постоянного обновления. Сезонные изменения, рост растительности или незначительные изменения в схеме дорог могут снизить точность определения местоположения, если они не отражены в базе данных.
Калибровка датчика
Точность слияния зависит от точности совмещения лидаров, камер и инерциальных измерительных блоков. Даже миллиметровые механические смещения или тепловое расширение могут вызвать угловое смещение, приводя к кумулятивному дрейфу с течением времени.
Почему качество инерциального измерительного блока определяет будущее автономной навигации
Инерциальный измерительный блок (ИИБ) — это последняя гарантия автономной локализации. Когда ГНСС и система визуального контроля теряют надёжность, только он информирует автомобиль о его истинном движении. Стабильность любой системы автономного вождения зависит от того, насколько точно ИИБ может измерять и поддерживать ориентацию в течение длительного времени.
Высококлассные инерциальные измерительные блоки (IMU) отличаются стабильностью смещения , случайным блужданием по углу (ARW) и температурной компенсацией . Эти параметры определяют, как долго система может поддерживать точное счисление пути без внешней коррекции. В то время как датчики потребительского уровня могут дрейфовать на метры за секунды, тактические инерциальные измерительные блоки (IMU) могут сохранять точность менее метра в течение нескольких минут — это разница между навигацией и спутанностью.
По мере развития автономности инерциальный измерительный блок (ИИ) остаётся его основой. Будущие системы будут интегрировать инерциальные датчики с ИИ-комплексом и адаптивным моделированием , но истинная надёжность по-прежнему будет основываться на одном ключевом принципе: качество обнаружения движения определяет надёжность навигации.
