Вы когда -нибудь пробовали интегрировать навигационную систему, только чтобы понять, что она вообще не дает позиции?
Это происходит, когда люди путают IMU с инсинажками. Это звучит технически, но последствия реальны: неправильный выбор оборудования, потраченный впустую бюджет и системы, которые просто не работают, как ожидалось. Исправление? Понимание ключевых различий между IMU, INS и то, что на самом деле предназначено для каждого. Это руководство проведет вас через это - все на простом английском.
IMU измеряет движение, в то время как INS использует данные IMU для вычисления положения и ориентации с течением времени - IMU является датчиком, INS - это система.
Давайте проясним путаницу - шаг.
Оглавление

Что такое IMU?
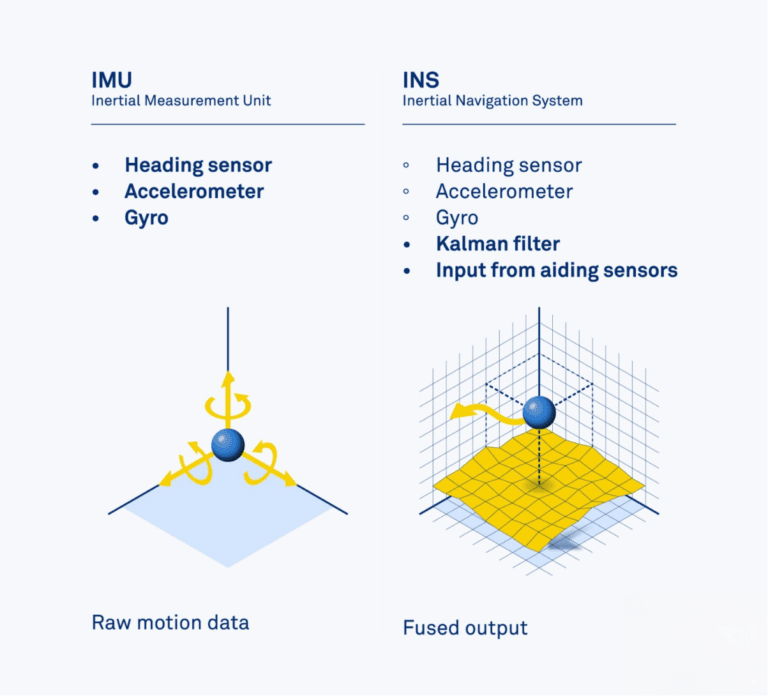
Инерционная единица измерения (IMU) - это датчическое устройство, которое измеряет ускорение и угловую скорость . Обычно построенный с помощью MEMS, FOG или HRG Technologies, IMU включает в себя акселерометры, гироскопы , а иногда и магнитометры . Он выводит необработанные инерционные данные, используемые для оценки движения в пространстве. IMU широко используются в беспилотниках, робототехнике, транспортных средствах и смартфонах. Однако самостоятельно они не обеспечивают позицию или ориентацию , если только не интегрируются с дополнительной обработкой. IMUS различается по точке, от недорогих коммерческих до тактических и навигационных датчиков, таких как Gudenav's GMS400.

Что такое вставки?
Инерционная навигационная система (INS) -это полная система, которая использует данные IMU для расчета положения, скорости и отношения в режиме реального времени. Обычно это включает в себя:
- Встроенный ИМУ
- Мощный бортовой процессор
- Алгоритмы слияния датчиков (например, фильтр Калмана )
- Часто модуль GNSS для помощи
INS выполняет интеграцию выходов IMU в реальном времени, чтобы обеспечить непрерывное навигационное решение. Из-за этого он может работать даже в окружающей среде GNSS в течение ограниченного времени, что делает его важным в аэрокосмической, морской и автономной миссиях . Системы, такие как Gudenav's GFS120 и Guide2D, иллюстрируют такую интеграцию.
Чем по -разному IMUS и INS?
Большинство людей упрощают это, сказав: «INS - это просто IMU с модулем GNSS». Технически, это начало, но это далеко от всей картины.
Да, INS включает в себя IMU. Но он также интегрирует процессор, GNSS (часто с поддержкой RTK или SBAS), а иногда и внешние датчики помощи, такие как колесные кодеры, датчики воздушной скорости, барометрические альтимеметры или журналы скорости допплера (DVL) . Эти дополнения позволяют в INS предоставлять данные в режиме реального времени, предоставляя не только движение, но и оценки высокой достоверности позиции, скорости и ориентации.
Думайте об ИМУ как о термометре - он сообщает вам необработанные данные. INS - это отчет о погоде: отфильтрован, слитый и готов действовать.
| Особенность | ИДУ | ИНС |
|---|---|---|
| Основная функция | Измерения ускорения и ротации | Вычисляет полное положение, скорость, ориентация |
| Компоненты | Акселерометр, гироскоп | IMU + GNSS + процессор + необязательные датчики |
| Выход | Необработанные данные движения | Объединенные данные навигации (в режиме реального времени) |
| Поддержка GNSS | Никто | Встроенный (RTK/SBAS. |
| Внешняя помощь | Непригодный | Одометр, DVL, воздушная скорость, альтимиметр и т. Д. |
Можете ли вы ориентироваться в IMU?
Подумайте о том, как ИМУ, как ощущение движения с закрытыми глазами. Вы можете сказать, что вы движетесь вперед или поворачиваете, но не представляете, где вы находитесь. Вот что происходит, когда вы пытаетесь ориентироваться, используя только IMU.
Конечно, вы можете интегрировать ускорение с течением времени для оценки позиции. Но крошечные ошибки накапливаются быстро, превращаясь в огромные ошибки в течение нескольких секунд. Это называется дрейфом, и это делает отдельный IMUS ненадежным для навигации.
Они отлично подходят для краткосрочной стабилизации, например, поддержания уровня карданного подвеса, но не для выяснения того, где вы находитесь и куда идете. Для этого вам нужен инси.
Как INS обрабатывает данные IMU?
В отличие от IMU, который только чувствует движение, INS интерпретирует это движение и превращает его в полную информацию о навигации. Это включает в себя знание того, где вы находитесь, как быстро вы двигаетесь, и в каком направлении вы сталкиваетесь. Но это не происходит автоматически. Это требует цепочки тщательно разработанных шагов, соблюдая физику, математику и коррекцию в реальном времени, чтобы превратить необработанные сигналы в надежную навигацию.
Давайте пройдемся через процесс:
1. Sense Motion (IMU вход)
Все начинается с IMU, которая непрерывно измеряет ускорение (через акселерометры) и угловой скорости (через гироскопы). Эти значения отражают, как система движется в трехмерном пространстве.
➡ Этот шаг дает INS его необработанное осознание движения.
2. Рассчитайте скорость и положение
INS интегрирует ускорение, чтобы получить скорость, а затем интегрирует скорость для оценки положения с течением времени. Это говорит о том, как далеко она прошла от своей отправной точки.
➡ Вот как INS отслеживает движение - даже без GPS.
3. Оценка ориентации
Обработка данных гироскопа и ссылки на векторы, такие как гравитация и магнитное поле Земли, INS определяет рулон, высоту и рыскание - ваша полная трехмерная ориентация.
➡ Этот шаг помогает системе понять, как она вращается или наклонилась.
4. Примените слияние датчика для точности
Одно только данные IMU дрейфуют с течением времени. В INS используется интеллектуальные алгоритмы, такие как фильтры Калмана, для объединения ввода IMU с другими датчиками:
- GNSS / RTK / SBAS
- Колесо одометры
- DVL или датчики воздушной скорости
- Барометрические альтимеметры
Эти исправления значительно повышают точность и долгосрочную стабильность.
➡ Fusion сохраняет надежную систему, даже когда некоторые датчики теряют сигнал.
5. Доставить выход навигации в реальном времени
Окончательный вывод-это непрерывный поток поток позиции, скорости и отношения в реальном времени-много раз в секунду, и готовый к использованию контроллерами полетов, автопилотами или системами отображения.
➡ Это то, что делает INS полным навигационным решением.
Продукты INS Guidenav следуют этой архитектуре-с помощью двигателей слияния, настроенных на условия, наполненные GNSS, динамические среды и платформы с высокой вибрацией. Результат: надежная навигация, которой вы можете доверять, когда она важнее всего.
Когда достаточно IMU для вашего приложения?
IMU - это все, что вам нужно, если вашей системе просто нужно почувствовать движение , а не рассчитать положение или направление с течением времени. Это идеально, когда вы реагируете на движение, не пытаясь отслеживать абсолютное местоположение.
Общие варианты использования включают:
Стабилизация камеры
Обнаружает вибрацию или наклон, чтобы помочь двигателям сохранять камеру устойчивой.
Отслеживание жестов
В AR/VR или носимых устройствах, где вы следуете движению - не точное положение.
Краткосрочная ориентация
Используется в беспилотниках или роботах во время стартапа, зависания или быстрых маневров.
Поддержка управления полетом
В сочетании с GNSS или оптическим потоком IMU обеспечивают быструю обратную связь для стабилизации беспилотников.
Просто имейте в виду: IMUS дает только необработанное ускорение и вращение. Если вам нужна ориентация или скорость, вам придется самостоятельно построить математику - фильтера, коррекция дрейфа и многое другое.
Если это в пределах возможности вашей системы, IMU - это легкое, доступное и эффективное решение.
Когда вам действительно нужны полный винс?
Вам нужны полные акты, когда ваша система должна всегда знать точную позицию и ориентацию, особенно в средах, где GNSS может потерпеть неудачу или недоступен.
Типичные варианты использования включают:
- Окружаемая средами GNSS: как туннели, в помещении, под водой или городские каньоны
- Платформы с высоким динамическим
- Мертвый расчет: где система должна поддерживать навигацию между сигналами GNSS или без GNSS вообще
- Критические задачи: такие как картирование, таргетирование или автономное вождение
В этих ситуациях только IMU быстро дрейфовал, что приведет к ненадежным результатам. ANS решает это путем слияния инерционных данных с GNSS и дополнительными датчиками, такими как DVL, одометры или альтиметры.
Каковы распространенные ошибки при выборе IMU или INS?
Давайте будем честными - когда дело доходит до инерционных датчиков, легко сделать неправильный звонок, особенно если вы новичок в этой области. Я видел, как команды выбирали не тот инструмент больше раз, чем я могу сосчитать. И это редко о технологии - речь идет о неправильном понимании проблемы.

Вот где все обычно уходит с пути:
Ошибка № 1: думать, что ИМУ дает вам позицию
Это не так. IMU только говорит вам, как быстро вы двигаетесь или поворачиваете. Если вы надеетесь на координат в реальном времени из коробки-вы будете разочарованы.
Ошибка № 2: Использование IMU начального уровня для требовательной работы
Недорогой датчик может хорошо выглядеть на бумаге, но как только вы привязываете его к быстро движущемуся дрону или роботу, шум и дрейф испортит ваши данные.
Ошибка № 3: Оплата за внедрения, когда ИМУ сделал бы трюк
Если все, что вам нужно, это стабилизировать камеру или обнаружить базовую ориентацию, полная INS является излишним. Не решайте проблему за 300 долларов с решением за 3000 долларов.
Ошибка № 4: Забыть в реальной среде
Лабораторные характеристики не всегда отражают производительность поля. Высокая вибрация, экстремальные температуры или ударные нагрузки могут быстро отбрасывать дешевые датчики.
Ошибка № 5: недооценка усилий по интеграции
Сырые данные IMU не подключаются. Если у вас нет правильного программного обеспечения, фильтров или алгоритмов, даже лучший датчик будет недооценивать.
Один на один приложенный консалтинг
В Guidenav мы не просто отправляем датчики - мы помогаем вам построить правильную систему . Мы предлагаем:
- Один на один приложенный консалтинг
- IMU/INS Performance Matching
- Руководства по интеграции для БПЛА, UGV и морских систем
- Комплекты для доступа и оценки данных
- Инженерная поддержка быстрого реагирования
Независимо от того, строите ли вы БПЛА с низкой мощностью или навигационную систему, разбитую GNSS, мы помогаем вам выбрать между MEMS IMU, FOG IMU или Complete INS на основе вашего профиля миссии.