В первой частимы подробно рассмотрели, что такое ARW и почему он незаметно определяет надежность любой системы на основе IMU. Но знание принципа работы ARW ценно только в том случае, если вы можете проектировать систему с учетом его особенностей. Во второй части мы сосредоточимся на практической стороне: как ARW влияет на реальную навигацию БПЛА, что может и чего не может делать программное обеспечение, и как я оцениваю датчики, когда отказ недопустим.
Случайное угловое блуждание (ARW) устанавливает предел точности инерциального измерительного блока (IMU). Его невозможно устранить программным обеспечением, его можно лишь уменьшить за счет выбора малошумных датчиков, стабильной тепловой конструкции, виброизоляции и эффективных стратегий объединения данных с нескольких датчиков.
Поэтому в этой части я расскажу вам о том, как ARW проявляется в реальных условиях эксплуатации БПЛА, почему одно лишь программное обеспечение не может его предотвратить, и какие практические конструктивные решения — выбор датчиков, терморегулирование, механическая изоляция и интеграция — могут определить успех или провал миссии.
Оглавление
Как система ARW влияет на навигацию БПЛА?
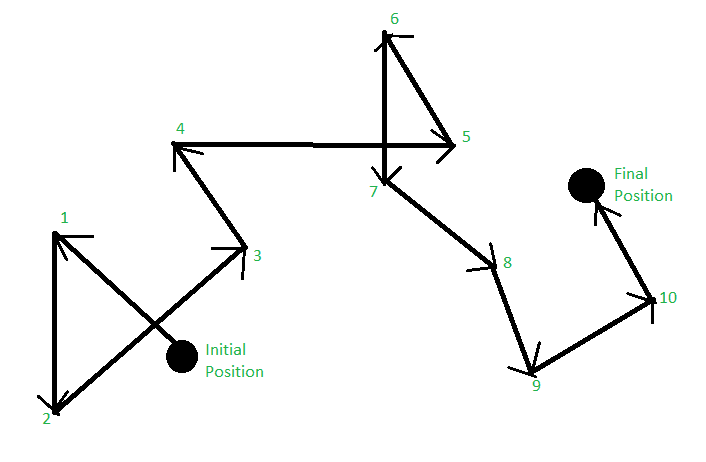
Представьте себе: вы управляете беспилотным летательным аппаратом с неподвижным крылом в каньоне, где отсутствует сигнал GNSS. Автопилот полностью полагается на ваш инерциальный измерительный блок (IMU) для удержания положения и поддержания стабильной траектории полета. Первые несколько минут все выглядит стабильно. Но затем ориентация начинает меняться — сначала медленно, затем быстрее. Беспилотник начинает отклоняться от курса, система удержания высоты начинает давать сбои, и вы теряете точку отсчета. Что произошло?
Это ARW в действии. Даже при отсутствии движения, температурных градиентов и вибрации, встроенный угловой шум незаметно подрывает вашу уверенность в управлении тангажем, креном и курсом. Как только вызванный ARW дрейф превысит пороговые значения системы управления полетом, никакая настройка ПИД-регулятора или сглаживание не смогут спасти платформу.
В своих собственных проектах БПЛА я рассматриваю ARW как бюджет времени навигации. MEMS-гироскоп с точностью 0,2°/√ч может обеспечить 10–15 минут полезной стабильности в зоне отсутствия GNSS. Тактический MEMS-гироскоп с точностью 0,05°/√ч расширяет это окно. FOG дает вам несколько часов. Разница не только в производительности —она в том, может ли вообще быть выполнена миссия.
Можно ли компенсировать ARW с помощью программного обеспечения?
Вот ловушка, которую я слишком часто вижу: команда сталкивается с дрейфом ориентации и предполагает, что это можно исправить в прошивке. Они добавляют больше фильтрации, увеличивают коэффициент усиления Калмана или добавляют слои объединения данных с датчиков —но дрейф не исчезает. Потому что они борются не с ошибкой в коде или неправильной конфигурацией объединения данных, а с физикой.
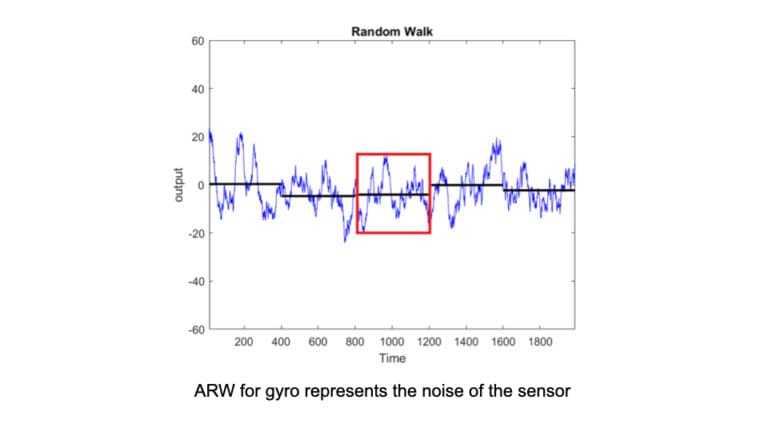
ARW — это не смещение и не ошибка смещения, это неустранимый шум. Он не стабилизируется со временем и не усредняется, как медленный тепловой дрейф. Он находится внизу каждого выходного сигнала гироскопа, внося неопределенность в ваше интегрирование с первой секунды.
Да, объединение данных помогает. Обновления GNSS могут сбросить дрейф курса. Системы машинного зрения или LiDAR могут закрепить положение. Но когда они перестают работать —например, в туннеле или при помехах — ваша система переключается на необработанные данные IMU, и в этот момент ARW становится таймером обратного отсчета. Если собственный шум датчика слишком высок, никакие программные уловки вас не спасут.
Я говорю командам: вы можете отфильтровать воздействие ARW, но не можете его устранить. Если вашей платформе необходимо летать, целиться или стабилизироваться без внешней коррекции более нескольких минут, выбирайте гироскоп с учетом этого — или проектируйте его с учетом возможных сбоев.
Как инженеры минимизируют ошибки ARW при проектировании систем?
Исключить ARW невозможно, но можно грамотно спроектировать систему с учетом этого фактора. Каждая система, которую я создавал с надежными инерционными характеристиками, начиналась с вопроса: «Насколько низким должен быть мой показатель ARW, и как этого добиться наиболее эффективно?» Вот как я подхожу к этому вопросу:
- Выбор датчика — первостепенная задача.Если ваш бюджет на ARW ограничен, никакой алгоритм не спасет дешевый MEMS-гироскоп. Начните с самого недорогого устройства ARW, которое соответствует вашим возможностям по объему производства, энергопотреблению и бюджету. По моему опыту, только это решение определяет 80% качества системы в дальнейшем.
- Термостойкость имеет большее значение, чем кажется.Даже у хорошо настроенного гироскопа уровень шума может возрастать с повышением температуры. Я видел, как значения ARW удваивались при плохой теплоизоляции. Стабильная тепловая масса или умеренное активное управление действительно имеют значение.
- Механическая изоляция снижает эффективный уровень шума.Вибрация вносит широкополосную энергию в сигнальный тракт датчика, часть которой интерпретируется как угловое движение. Мягкие крепления или настроенные изоляторы сами по себе не снижают уровень ARW, но они снижают то, что система воспринимает как ARW.
- Объединение данных с датчиков расширяет временной горизонт.GNSS, магнитометры, барометры, визуальная одометрия — все они помогают, но только если их собственная неопределенность хорошо контролируется. Я рассматриваю объединение данных не как компенсацию недостатков плохих инерциальных измерительных блоков, а как множитель для хороших.
Главный вывод? ARW определяет нижний предел. Все остальное строится на его основе. Если ваш датчик по своей сути зашумлен, каждый последующий слой — фильтры, оценщики, объединение данных — унаследует эту неопределенность.
На что следует обратить внимание при выборе оборудования, чувствительного к наличию аварийного радиолокационного обнаружения (АРВ)?
При выборе инерциального измерительного блока (IMU) для критически важной платформы вы выбираете не просто технические характеристики, а временные рамки отказов. Показатель ARW (Assual Reliability Value) показывает, как долго ваша система может летать, управляться, наводиться или стабилизироваться без внешней коррекции, прежде чем в дело вступит неопределенность. Именно поэтому я считаю ARW определяющей переменной при выборе IMU.
Вот как я это формулирую:
- Если интервал между сбоями GNSS-сигнала составляет менее 5 минут, и вам нужна лишь приблизительная ориентация, то могут подойти промышленные MEMS-фильтры (0,1–0,5°/√ч). Просто имейте в виду, что ваш фильтр будет постоянно бороться с дрейфом.
- Если вашей платформе необходимо сохранять стабильность в течение 10–20 минут, как, например, в беспилотных летательных аппаратах для разведки и наблюдения или в оптике, устанавливаемой на транспортные средства, то тактические MEMS-датчики с ARW в диапазоне 0,05°/√ч являются минимальным начальным уровнем. Я никогда не использую здесь датчики потребительского класса — без исключений.
- Если вам необходима надежность на уровне часов — морская навигация, железнодорожные системы, воздушное вооружение — то использование FOG больше не является необязательным.Вам потребуется ARW ниже 0,01°/√ч, и, что более важно, стабильность и устойчивость к воздействию окружающей среды, которые обеспечивает архитектура FOG.
На каждом этапе анализа проекта я задаю себе вопрос: «Что произойдет, когда внешние опорные сигналы перестанут поступать?» Если ответ: «Ситуация ухудшается медленно и предсказуемо», значит, ARW выполняет свою работу. Если же ответ: «Ситуация выйдет из-под контроля менее чем за 3 минуты», значит, вы выбрали не тот инерциальный измерительный блок (IMU).
ARW как эталон для выбора подходящего инерциального измерительного блока (IMU)
Случайное угловое блуждание — это не просто число, скрытое в технической документации, это критерий, определяющий, можно ли доверять инерциальному измерительному блоку (IMU) в критически важных приложениях. Инженеры в оборонной, аэрокосмической и морской отраслях знают, что низкое значение ARW — это разница между системами, которые начинают дрейфовать в течение нескольких минут, и системами, которые остаются стабильными в течение нескольких часов или даже дней.
В GuideNavмы уделяем особое внимание именно этому стандарту. Наши инерциальные измерительные блоки (IMU) и навигационные системы на основе волоконно-оптических гироскопов (FOG) разработаны с учетом лучших в отрасли показателей ARW, обеспечивая точность в условиях отсутствия GNSS, для беспилотных летательных аппаратов большой дальности и платформ точной стабилизации. Независимо от того, нужна ли вам компактная эффективность тактических MEMS-устройств или исключительная стабильность волоконно-оптических гироскопов навигационного класса, GuideNav предлагает решения, адаптированные к требованиям успешного выполнения миссии.
