Оглавление
- Что такое IMU?
- Компоненты инерциального измерительного блока
- Как работает инерциальный измерительный блок?
- Автономные и беспилотные транспортные средства
- Аэрокосмическая и авиационная промышленность
- Робототехника
- Виртуальная реальность (VR) и дополненная реальность (AR)
- Медицинские изделия
- Спортивная аналитика и захват движений
- Бытовая электроника
- MEMS IMU против FOG IMU: ключевые различия
- MEMS IMU: Обзор и характеристики
- Инерциальный измерительный блок для туманных экспериментов: обзор и характеристики
- Показатели производительности инерциального измерительного блока (IMU)
- Методы калибровки инерциального измерительного блока (IMU)
- Преимущества инерциальных измерительных блоков
- Ограничения инерциальных измерительных блоков
- IMU против AHRS (системы определения положения и курса)
- Инерциальный измерительный блок (IMU) против инерциальной навигационной системы (INS)
- Различные типы инерциальных измерительных блоков (IMU) и обзор их рынка
- Будущие тенденции и развитие инерциальных измерительных блоков
Введение
Инерциальные измерительные блоки (ИМБ) играют решающую роль в современных высокотехнологичных отраслях, включая беспилотные автомобили, робототехнику и аэрокосмическую промышленность. Однако, несмотря на их широкое распространение, многие до сих пор не до конца понимают, как работают ИТБ и каков их потенциал. Без этого понимания существует риск неэффективности и ошибок в работе системы. В этой статье мы рассмотрим основы работы ИТБ, их применение и будущие тенденции, чтобы вы могли максимально эффективно использовать эту технологию.
Инерциальный измерительный блок (ИМБ) — это устройство, измеряющее ускорение, угловую скорость, а иногда и магнитные поля для определения ориентации и положения объекта. ИМБ играют важную роль в навигации, системах управления и отслеживании движения. Объединяя данные датчиков, ИМБ позволяют точно отслеживать движение и ориентацию в условиях, когда сигналы GPS могут быть слабыми или недоступными.
Будущее инерциальных измерительных блоков (IMU) выглядит многообещающим, а такие тенденции, как объединение данных с датчиков и интеграция искусственного интеллекта, открывают новые возможности. Давайте разберемся, как работают эти системы и что ждет их в будущем в передовых технологиях.
Основы работы инерциального измерительного блока (ИМБ)
Компоненты инерциального измерительного блока
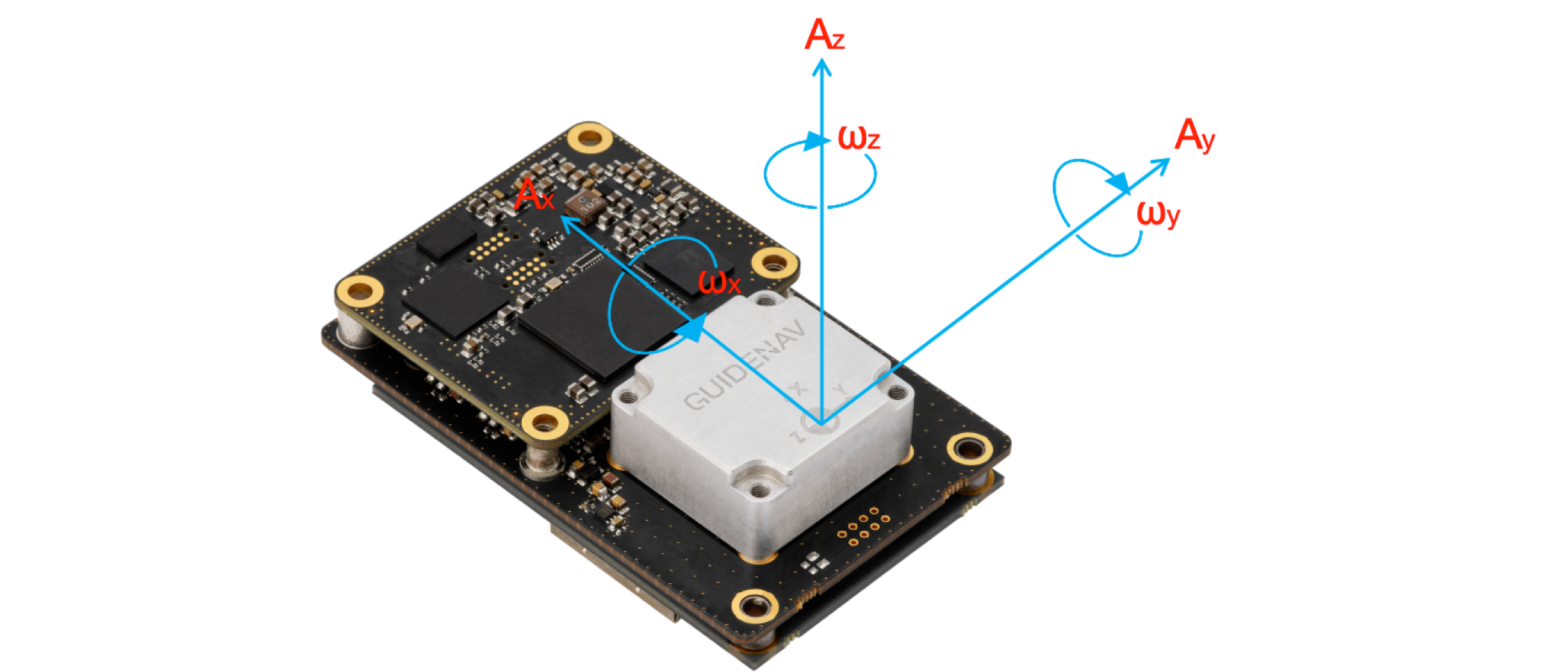
Инерциальный измерительный блок (IMU) обычно включает в себя следующие ключевые датчики. Давайте рассмотрим их подробнее и посмотрим, как каждый из них способствует общей функциональности:
| Компонент | Функция | Выход |
|---|---|---|
| Акселерометр | Измеряет линейное ускорение вдоль осей X, Y и Z. | Предоставляет данные о скорости и перемещении. |
| Гироскоп | Измеряет угловую скорость (скорость вращения) вокруг осей X, Y и Z. | Предоставляет данные об ориентации (отношении). |
| Магнитометр (опционально) | Измеряет напряженность и направление магнитного поля относительно магнитного поля Земли. | Указывает направление (по компасу). |
Каждый из этих датчиков играет решающую роль в предоставлении данных о движении в реальном времени, помогая нам понять, как объект движется и вращается в пространстве.
Как работает инерциальный измерительный блок?
Вот как мы в GuideNavпроектируем инерциальные измерительные блоки (IMU) для обеспечения их бесперебойной работы:
- Измерение ускорения: Акселерометр регистрирует изменения скорости по трем осям. Эти данные позволяют определить, насколько быстро объект ускоряется или замедляется, что крайне важно для отслеживания перемещения во времени.
- Измерение угловой скорости: гироскоп отслеживает, насколько объект вращается вокруг каждой из трех осей. Интегрируя эти данные о вращении во времени, инерциальный измерительный блок (IMU) может определить точную ориентацию объекта в пространстве.
- Измерение магнитного поля (опционально) : Если магнитометр входит в комплект, он измеряет магнитное поле Земли, предоставляя показания компаса. Это помогает корректировать любые отклонения в показаниях гироскопа, обеспечивая точность работы инерциального измерительного блока (IMU) в течение длительных периодов времени.
В GuideNavмы используем алгоритмы слияния данных с датчиков для объединения информации от этих компонентов. Благодаря этому мы создаем высокоточное представление положения и ориентации объекта в трехмерном пространстве.
Применение инерциальных измерительных блоков (ИМБ)
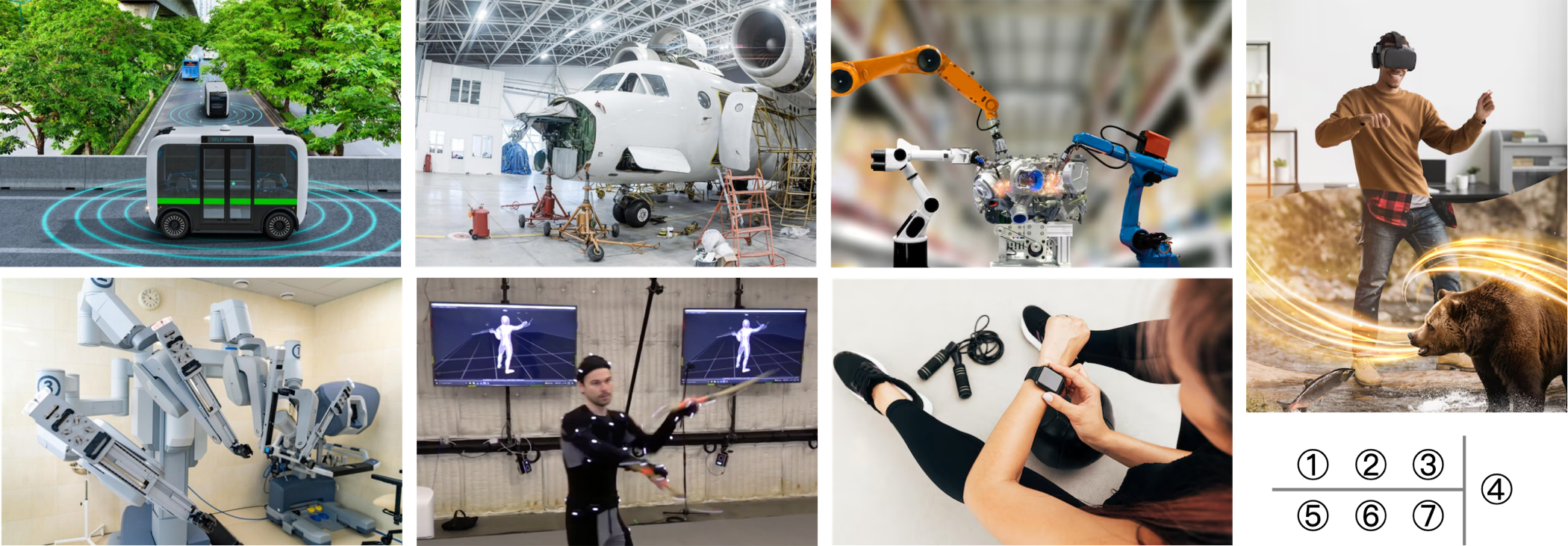
Инерциальные измерительные блоки (ИМБ) используются в самых разных областях, предоставляя важные данные об ускорении, угловой скорости, а иногда и о магнитных полях. Их точность и универсальность делают их незаменимыми в таких отраслях, как автономные транспортные средства, аэрокосмическая промышленность, робототехника, виртуальная реальность, здравоохранение, спортивная аналитика и бытовая электроника. Ниже мы рассмотрим некоторые ключевые области применения, где ИТБ незаменимы.
1. Автономные и беспилотные транспортные средства
Инерциальные измерительные блоки ( IMU) играют решающую роль в разработке и эксплуатации автономных транспортных средств . Они помогают отслеживать движение и ориентацию транспортного средства в режиме реального времени, обеспечивая стабильность и точную навигацию. Хотя для позиционирования часто используются данные глобальной системы позиционирования (GPS) , IMU необходимы, когда сигналы GPS слабые или недоступны (например, в туннелях, городских каньонах или отдаленных районах).
| Приложение | Роль инерциального измерительного блока (IMU) |
|---|---|
| Автономные автомобили | Предоставляет данные об ориентации и движении транспортного средства для обеспечения стабильной навигации. |
| Дроны | Обеспечивает точное управление траекторией полета и положением. |
| Роботизированные транспортные средства | Отслеживает перемещения в условиях бездорожья или отсутствия GPS-сигнала. |
2. Аэрокосмическая отрасль и авиация
Инерциальные измерительные блоки (IMU) уже давно являются неотъемлемой частью аэрокосмической и авиационной промышленности. Они предоставляют данные в реальном времени об ориентации и движении летательных аппаратов и космических аппаратов. IMU используются как в коммерческой авиации , так и в освоении космоса, обеспечивая высокую надежность и точность в сложных условиях, где GPS может быть недоступен или нецелесообразен.
| Приложение | Роль инерциального измерительного блока (IMU) |
|---|---|
| Авиационная навигация | Предоставляет данные об ориентации для обеспечения стабильного полета. |
| Навигация космического аппарата | Обеспечивает точную ориентацию и управление движением в пространстве. |
| Ориентация спутника | Обеспечивает поддержание ориентации и траектории спутника во время работы. |
3. Робототехника
В робототехникеинерциальные измерительные блоки (IMU) используются для мониторинга движения, ориентации и баланса роботов в промышленных, медицинских и бытовых приложениях. IMU обеспечивают обратную связь с системами управления роботами, гарантируя плавное и точное движение в различных условиях.
| Приложение | Роль инерциального измерительного блока (IMU) |
|---|---|
| Промышленные роботы | Обеспечивает стабильное движение во время выполнения производственных задач. |
| Медицинские роботы | Обеспечивает точный контроль движений при хирургических операциях и реабилитации. |
| Автономные роботы | Отслеживает положение и ориентацию для навигации в динамических средах. |
4. Виртуальная реальность (VR) и дополненная реальность (AR)
В мире виртуальной реальности (VR) и дополненной реальности (AR)IMU) являются ключевыми компонентами для отслеживания движений головы и тела пользователя. Измеряя вращение, ускорение и иногда магнитные поля, IMU предоставляют данные о движении в реальном времени, что усиливает эффект погружения.
| Приложение | Роль инерциального измерительного блока (IMU) |
|---|---|
| VR-гарнитуры | Отслеживает движения головы для корректировки виртуальной среды. |
| Устройства дополненной реальности | Отслеживает движения рук для взаимодействия с виртуальными объектами. |
| Управление жестами | Распознаёт жесты пользователя для взаимодействия в системах дополненной и виртуальной реальности. |
5. Медицинские изделия
Инерциальные измерительные блоки (IMU) все чаще интегрируются в медицинские устройства для различных целей, включая отслеживание движений, реабилитацию и диагностику. Их способность измерять точные движения делает их бесценными для понимания и мониторинга прогресса пациента.
| Приложение | Роль инерциального измерительного блока (IMU) |
|---|---|
| Физическая реабилитация | Отслеживает движения пациентов во время терапии для контроля прогресса. |
| Носимые устройства | Отслеживает двигательные расстройства, например, у пациентов с болезнью Паркинсона. |
| Захват движений для диагностики | Измеряет аномальные движения в диагностических целях. |
6. Спортивная аналитика и захват движений
Инерциальные измерительные блоки (IMU) широко используются в спортивной аналитике и захвате движений для мониторинга результатов спортсменов и оптимизации их движений. Точное отслеживание движений, обеспечиваемое IMU, помогает в предотвращении травм, анализе результатов и их улучшении.
| Приложение | Роль инерциального измерительного блока (IMU) |
|---|---|
| Результаты спортсменов | Отслеживает данные о движении для анализа скорости, ускорения и эффективности. |
| Профилактика травм | Отслеживает перемещения для выявления рисков. |
| Захват движений | Позволяет записывать движения человека для использования в кино, анимации и играх. |
7. Бытовая электроника
Инерциальные измерительные блоки (IMU) также встраиваются во многие потребительские электронные устройства, такие как смартфоны, носимые устройства и игровые контроллеры. Эти устройства используют IMU для определения движения и ориентации, что позволяет реализовать различные функции и улучшить пользовательский опыт.
| Приложение | Роль инерциального измерительного блока (IMU) |
|---|---|
| Смартфоны | Обеспечивает поворот экрана, управление движениями и отслеживание активности. |
| Фитнес-трекеры | Отслеживает количество шагов, пройденное расстояние и физическую активность. |
| Игровые контроллеры | Отслеживает движения игрока для создания эффекта полного погружения в игровой процесс. |
Типы инерциальных измерительных блоков (ИМБ): MEMS ИТБ против FOG ИТБ
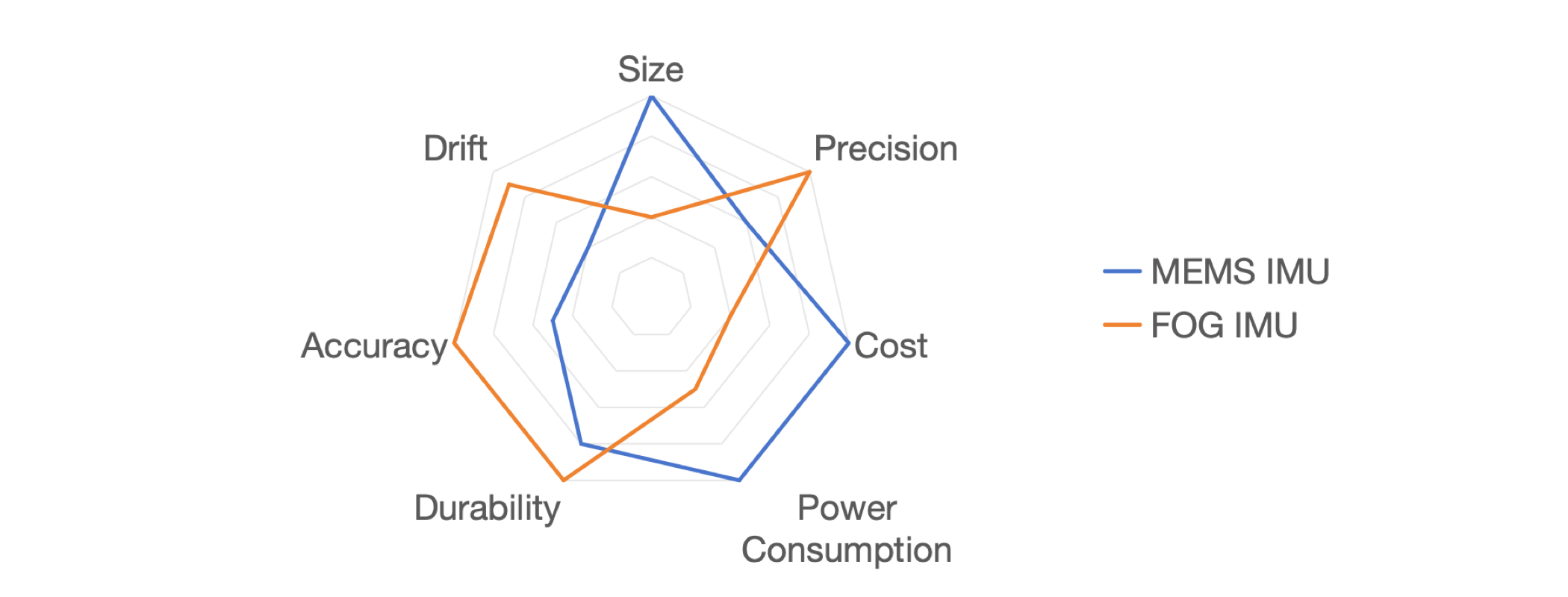
Инерциальные измерительные блоки (ИМБ) играют важную роль во многих отраслях промышленности, особенно в оборонной и аэрокосмической отраслях, где критически важна высокая точность. Два основных типа ИТБ — микроэлектромеханические ИТБ (MEMS IMU) и волоконно-оптические гироскопические ИТБ (FOG IMU)— значительно различаются по характеристикам, размеру, стоимости и пригодности для различных применений.
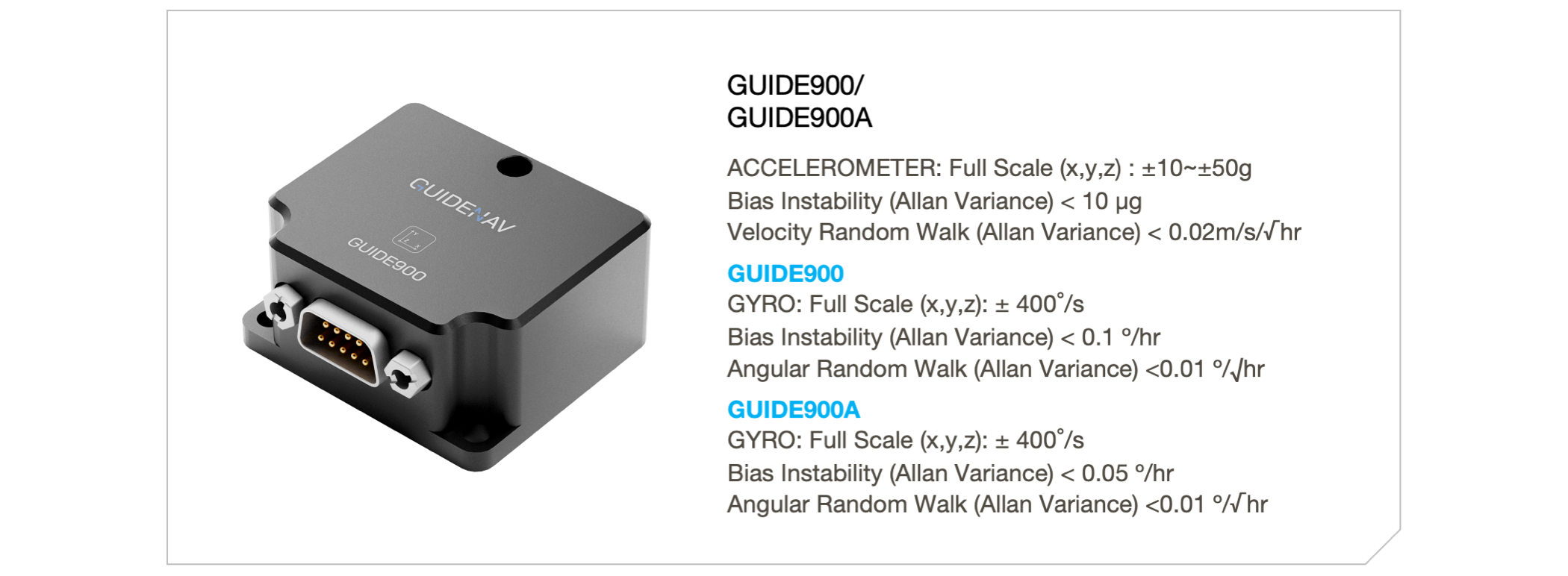
Хотя инерциальные измерительные блоки на основе волоконно-оптических гироскопов (FOG IMU) традиционно использовались в высокоточных областях, таких как аэрокосмическая промышленность, оборона и робототехника, недавние достижения в области микроэлектромеханических инерциальных измерительных блоков (MEMS IMU) , такие как GUIDE900 и GUIDE900A , теперь обеспечивают точность 0,1°/час и 0,05°/час соответственно, что сопоставимо с показателями базовых моделей FOG IMU . Это улучшение позволяет использовать MEMS IMU в высокоточных приложениях , которые ранее были преимущественно связаны с волоконно-оптическими инерциальными измерительными блоками .
MEMS IMU против FOG IMU: ключевые различия
| Параметр | MEMS IMU | ИМУ для тумана |
|---|---|---|
| Технологии | На основе микроэлектромеханических систем (МЭМС) датчиков. | Использует волоконно-оптические гироскопы (ВОГ) для измерения угловой скорости. |
| Размер | Компактный и легкий, идеально подходит для портативных устройств. | Более крупный, более прочный, подходит для высокоточных применений в крупномасштабных системах. |
| Точность | Умеренная точность, но более новые высокоточные MEMS IMU могут достигать 0,1°/час или 0,05°/час. | Исключительно высокая точность, минимальный дрейф и более высокая стабильность во времени. |
| Расходы | Низкая стоимость делает их идеальными для массового рынка. | Более высокая стоимость обусловлена использованием передовых технологий в системах высокого класса. |
| Потребление электроэнергии | Низкое энергопотребление, подходит для устройств с батарейным питанием. | Более высокое энергопотребление, лучше подходит для систем с большим энергетическим бюджетом. |
| Долговечность | Менее долговечен в экстремальных условиях окружающей среды. | Очень прочный, способен выдерживать суровые условия эксплуатации. |
| Точность | Подходит для применений с низкой и средней точностью. | Высокая точность, подходит для высокоточной навигации и обеспечивает стабильность. |
| Приложения | Бытовая электроника, автомобильные системы, дроны, БПЛА, **военные системы**. | Аэрокосмическая отрасль, оборонная промышленность, промышленная робототехника, высокотехнологичные навигационные системы. |
| Дрифт | Увеличение дрейфа с течением времени, требующее повторной калибровки. | Очень низкий дрейф, идеально подходит для длительной эксплуатации без повторной калибровки. |
| Время отклика | Более быстрая реакция благодаря меньшим размерам и более простой конструкции. | Несколько более медленная реакция, но обеспечивает более высокую стабильность во времени. |
MEMS IMU: Обзор и характеристики
Измерительные блоки MEMS ( Metro-Electro-Mechanical Systems) используют технологию микроэлектромеханических систем (MEMS) , в которой небольшие механические компоненты интегрированы с электроникой на микрочипе. Основные преимущества MEMS IMU — их малый размер , низкая стоимость и низкое энергопотребление . Эти характеристики делают MEMS IMU идеальными для применения в бытовой электронике, автомобильных системах и, все чаще, в военных целях .
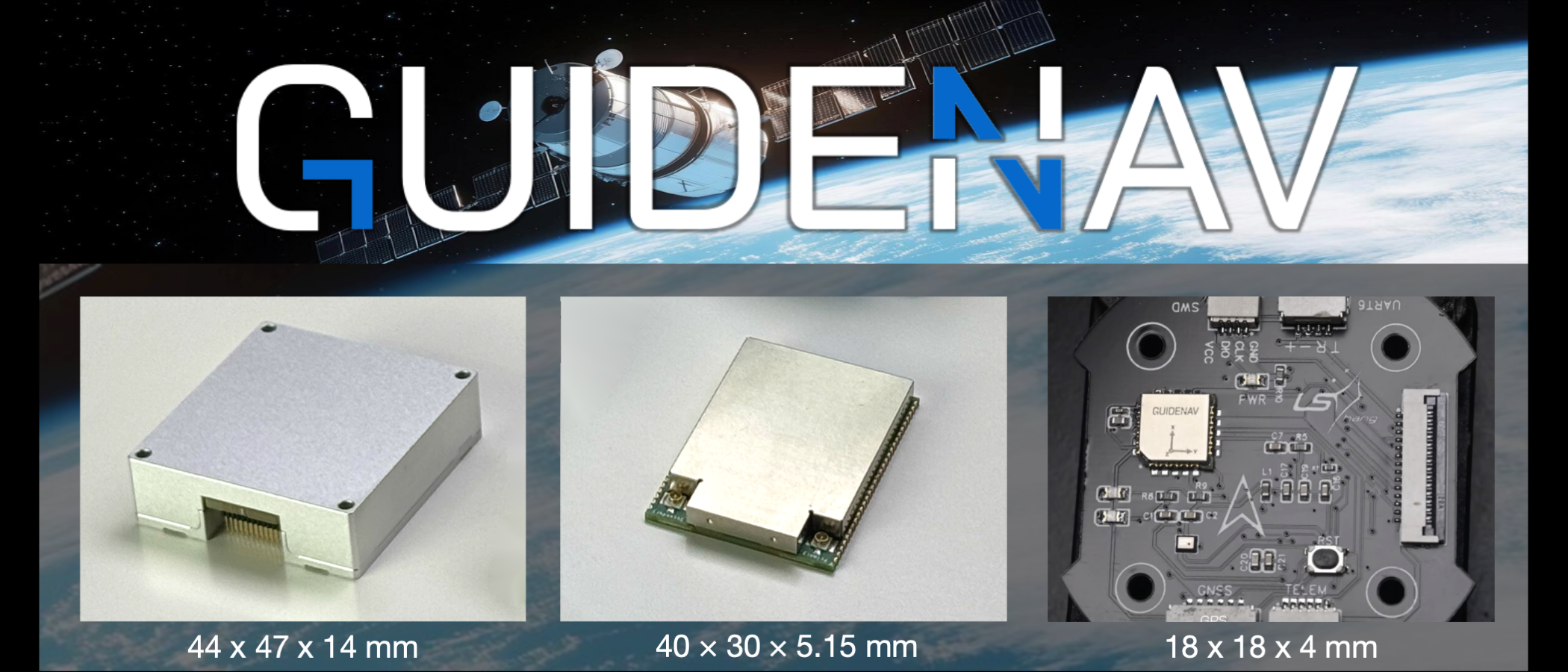
В GuideNavмы особенно гордимся нашими высокоточными MEMS-инерциальными измерительными блоками (IMU), такими как GUIDE900 и GUIDE900A, которые обеспечивают точность 0,1°/час и 0,05°/чассоответственно, что делает их подходящими для некоторых высокоточных приложений, в которых традиционно доминировали инерциальные измерительные блоки на основе гироскопов (FOG IMU).
Основные характеристики MEMS-инерциальных измерительных блоков:
- Компактный размер: идеально подходит для небольших устройств, таких как смартфоны, носимые устройстваи военные дроны.
- Низкая стоимость: идеально подходит для применений с большими объемами, таких как автомобильные системы, бытовая электроникаи оборонные системы, где необходимо сбалансировать производительность и доступность.
- Умеренная точность: Хотя MEMS-инерциальные измерительные блоки (IMU)обеспечивают более низкую точность, чем FOG-инерциальные измерительные блоки, высокоточные модели в настоящее время заполняют этот пробел во многих областях оборонной промышленности.
- Низкое энергопотребление: высокая эффективность для устройств с батарейным питанием, что крайне важно для военных беспилотников, интеллектуальных систем вооруженияи других мобильных оборонных технологий.
Области применения MEMS-инерциальных измерительных блоков:
- Оборона : Используется в военных беспилотниках , навигационных системах для бронированной техники и системах наведения ракет . В этих областях применения преимуществами являются компактность и низкая стоимость MEMS-инерциальных измерительных блоков (IMU)
- Бытовая электроника: используется в смартфонах, фитнес-трекерахи игровых контроллерах.
- Автомобильные системы: используются в системах стабилизации транспортных средстви автономной навигации.
- Дроны и БПЛА: Обеспечение ориентации и стабилизации в военных дронахи БПЛА потребительского класса.
Инерциальный измерительный блок для туманных экспериментов: обзор и характеристики
В инерциальных измерительных блоках на основе волоконно-оптических гироскопов ( FOG IMU ) для измерения угловой скорости используются волоконно-оптические гироскопы , что обеспечивает чрезвычайно высокую точность и стабильность. Это делает FOG IMU идеальными для применений, требующих минимального дрейфа и долговременной надежности, таких как аэрокосмическая навигация , наведение ракет и высокотехнологичная робототехника .
Хотя инерциальные измерительные блоки на основе волоконно-оптических гироскопов (FOG IMU) широко известны своей точностью и долговечностью, инерциальные измерительные блоки на основе микроэлектромеханических систем (MEMS IMU) сокращают разрыв в производительности, особенно в военных приложениях , где стоимость, размер и энергопотребление являются ключевыми факторами.
Основные характеристики инерциальных измерительных блоков FOG:
- Высокая точность: Инерциальные измерительные блоки на основе волоконно-оптического тумана (FOG IMU)отличаются чрезвычайно низким дрейфом, что делает их идеальными для высокоточных приложений, таких как спутниковая навигация и военные системы наведения.
- Долговечность: Благодаря способности выдерживать экстремальные условия окружающей среды, инерциальные измерительные блоки на основе волоконно-оптических гальванометровидеально подходят для аэрокосмических и военных систем , которым необходимо работать в суровых условиях.
- Более высокое энергопотребление: блоки на основе волоконно-оптических гироскопов (FOG IMU)обычно потребляют больше энергии, что делает их более подходящими для систем с достаточными энергетическими ресурсами.
- Больший размер: Инерциальные измерительные блоки на основе волоконно-оптического тумана (FOG IMU)более громоздки по сравнению с инерциальными измерительными блоками на основе микроэлектромеханических систем (MEMS IMU), поэтому они используются в более крупных системах, таких как самолеты и космические аппараты.
Области применения инерциальных измерительных блоков на основе волоконно-оптических гироскопов:
- Аэрокосмическая отрасль: Используется в авиационнойи спутниковой навигации, где критически важны высокая точность и стабильность.
- Оборона: Широко используется в системах наведения ракет, беспилотных военных аппаратахи военных навигационных системах.
- Высокотехнологичная робототехника: используется в промышленной робототехнике, хирургических роботахи системах автономной навигации,где необходимы точность и долговременная стабильность.
Когда выбирать между MEMS IMU и FOG IMU
| Вариант использования | MEMS IMU | ИМУ для тумана |
|---|---|---|
| Бытовая электроника | Идеально подходит для смартфонов, носимых устройств и фитнес-трекеров. | Не подходит из-за высокой стоимости и энергопотребления. |
| Аэрокосмическая и авиационная промышленность | Подходит для недорогих, небольших систем со средними требованиями к точности. | Незаменим для высокоточных навигационных и систем ориентации. |
| Автономные транспортные средства | Подходит для недорогих решений со средними требованиями к производительности. | Необходимо для высокоточной навигации в сложных условиях. |
| Военное дело и оборона | Используется в **военных беспилотниках**, **навигационных системах** для **транспортных средств** и **системах наведения ракет**. | Широко используется для наведения ракет, беспилотных летательных аппаратов и навигации в сложных условиях. |
| Робототехника | Подходит для бытовых роботов или образовательных проектов. | Предпочтительно для промышленных роботов, хирургических роботов и других систем, требующих высокой точности. |
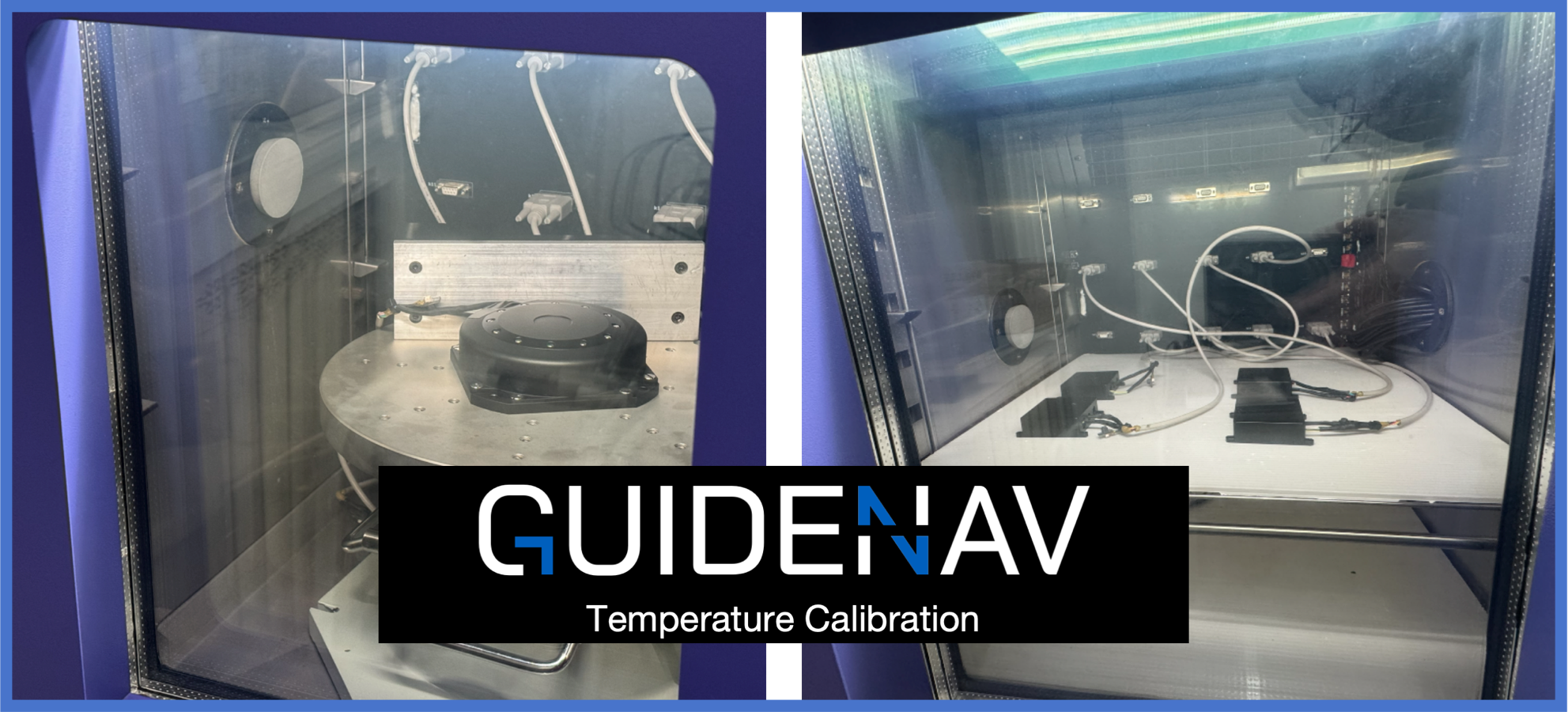
Характеристики и калибровка инерциального измерительного блока (ИМБ)
На работу инерциальных измерительных блоков (ИМБ) могут влиять различные факторы, такие как дрейф датчиков, температура и условия окружающей среды. Для обеспечения оптимальной работы необходимо понимать ключевые показатели эффективности (КПИ) ИТБ и методы калибровки, используемые для повышения их точности.
Показатели производительности инерциального измерительного блока (IMU)
Работоспособность инерциального измерительного блока (ИМБ) оценивается на основе нескольких ключевых факторов, которые напрямую влияют на его точность и надежность. Ниже приведены наиболее важные показатели производительности ИТБ:
| Показатель эффективности | Описание |
|---|---|
| Стабильность смещения | Стабильность показаний инерциального измерительного блока (IMU) во времени. Стабильный IMU будет иметь минимальные отклонения в измерениях. |
| Масштабный коэффициент | Соотношение между фактическим физическим движением и выходными данными инерциального измерительного блока (IMU). Любые ошибки в этом соотношении могут привести к неправильной интерпретации данных. |
| Шум | Случайные колебания показаний датчика IMU. Низкий уровень шума указывает на более высокую точность измерений. |
| Случайное блуждание | Описывает изменение измерений с течением времени. Это показатель того, насколько измерение отклоняется от своего истинного значения из-за случайного шума. |
| Разрешение | Наименьшее измеримое изменение показаний датчика инерциального измерительного блока (IMU). Более высокое разрешение повышает точность измерений. |
| Нелинейность | Отклонение от линейной зависимости между входными и выходными данными. Нелинейности могут вызывать ошибки при высоких ускорениях или угловых скоростях. |
| Чувствительность к температуре | Изменения в показаниях инерциального измерительного блока (IMU) обусловлены колебаниями температуры окружающей среды. IMU с низкой температурной чувствительностью обеспечивают более точные измерения в условиях изменяющейся окружающей среды. |
Методы калибровки инерциального измерительного блока (IMU)
Калибровка — это важнейший процесс, помогающий повысить точность инерциального измерительного блока (ИМБ) путем коррекции ошибок, которые могут возникать из-за дрейфа датчиков, смещения и других факторов. Калибровка ИТБ обычно включает три основные системы датчиков: акселерометр ,гироскоп имагнитометр .Для каждого из этих датчиков требуются специальные методы калибровки, обеспечивающие точные и надежные измерения.
1. Калибровка акселерометра
Акселерометр , таким как отклонения масштабного коэффициента, смещения и неортогональность осей.
| Метод калибровки | Описание |
|---|---|
| Статическая калибровка | Распространенный метод, при котором инерциальный измерительный блок (IMU) размещается в известном положении (например, плашмя на поверхности). Измеряя ускорение свободного падения (9,81 м/с²), можно скорректировать ошибки датчика. |
| Динамическая калибровка | Процесс включает в себя перемещение инерциального измерительного блока (IMU) при различных известных ускорениях и направлениях для коррекции ошибок масштабного коэффициента, смещения и несовпадения осей. |
| Температурная компенсация | Поскольку акселерометры чувствительны к температуре, калибровка также включает компенсацию колебаний температуры, которые могут вызывать ошибки измерения. |

2. Калибровка гироскопа
Гироскоп измеряет угловую скорость вокруг осей X, Y и Z инерциального измерительного блока (IMU). Гироскопы могут страдать от дрейфа ( когда показания датчика медленно изменяются со временем) и нестабильности смещения (когда существует постоянное смещение в измерениях).
| Метод калибровки | Описание |
|---|---|
| Калибровка нулевой скорости смещения | В этом методе гироскоп устанавливается в неподвижное положение (без движения), а смещение или ошибка измеряются и корректируются. |
| Калибровка таблицы ставок | Это включает в себя вращение инерциального измерительного блока (IMU) с различными известными угловыми скоростями для определения любых нелинейностей или ошибок масштабного коэффициента. |
| Калибровка температуры | Подобно акселерометрам, гироскопы чувствительны к изменениям температуры. Калибровка учитывает изменения в работе датчика при разных температурах. |
Калибровка гироскопа обеспечивает точность показаний угловой скорости инерциального измерительного блока (IMU) и исключает дрейф, что повышает его производительность в динамических условиях.
3. Калибровка магнитометра
Магнитометр измеряет силу и направление магнитного поля Земли, предоставляя данные об ориентации, которые используются для определения курса. На работу магнитометров могут влиять локальные магнитные возмущения, смещение датчика и ошибки в масштабном коэффициенте .
| Метод калибровки | Описание |
|---|---|
| Калибровка твердого железа | Этот метод компенсирует искажения магнитного поля, вызванные собственными компонентами инерциального измерительного блока (например, электронными устройствами). |
| Калибровка мягкого железа | Корректирует искажения, вызванные окружающей средой или материалами, находящимися вблизи инерциального измерительного блока (IMU). |
| Многоточечная калибровка | Для обнаружения и коррекции ошибок магнитометр подвергается воздействию различных известных значений напряженности и направления магнитного поля. |
Калибровка магнитометра необходима для получения точных данных о направлении и ориентации, особенно при использовании инерциального измерительного блока (IMU) в условиях изменяющегося магнитного поля.
Преимущества и ограничения инерциальных измерительных блоков (ИМБ)
Инерциальные измерительные блоки (ИМУ) обеспечивают исключительную производительность в реальном времени, независимость от внешних систем и высокую адаптивность к различным отраслям. Однако при выборе подходящей технологии необходимо учитывать их дрейф , чувствительность к окружающей среде и высокую стоимость высокоточных моделей . MEMS-ИМУ обеспечивают баланс между стоимостью и производительностью для многих потребительских и промышленных применений, в то время как ИМУ на основе волоконно-оптических гироскопов (ВОГ) являются предпочтительным выбором для высокоточных задач с длительным временем работы в аэрокосмической и оборонной отраслях. Понимание сильных и слабых сторон ИМУ поможет вам выбрать наилучшую систему для ваших конкретных потребностей.
Преимущества инерциальных измерительных блоков
| Преимущество | Описание |
|---|---|
| Высокая точность в динамических условиях | Инерциальные измерительные блоки (IMU) обеспечивают измерения ускорения и угловой скорости в реальном времени , что крайне важно для применения в автономных транспортных средствах , аэрокосмической отрасли и робототехнике , где GPS или другие внешние источники данных недоступны. |
| Независимость от внешних сигналов | Инерциальные измерительные блоки (IMU) работают без зависимости от внешних сигналов, таких как GPS, что делает их очень надежными в таких условиях, как подземная навигация, исследование космосаили робототехника внутри помещений. |
| Компактный и легкий | MEMS-инерциальные измерительные блоки (IMU) — это компактные и легкие устройства, идеально подходящие для таких применений, как носимые устройства, дроныи бытовая электроника, где пространство и вес имеют решающее значение. |
| Низкое энергопотребление | MEMS-инерциальные измерительные блоки (IMU) энергоэффективны и идеально подходят для устройств с батарейным питанием, таких как умные часы и фитнес-трекеры , которым необходимо работать в течение длительного времени. |
| Обработка данных в реальном времени | Инерциальные измерительные блоки (IMU) передают данные с высокой частотой и низкой задержкой, что делает их пригодными для управления в реальном времени в робототехнике, стабилизации дронови навигации транспортных средств. |
| Выносливость в суровых условиях | тумана (FOG IMU) и некоторые высококачественные MEMS IMU способны выдерживать экстремальные условия, такие как сильная вибрация, перепады температури удары, что делает их идеальными для в военной и аэрокосмической отраслях . |
Ограничения инерциальных измерительных блоков
| Ограничение | Описание |
|---|---|
| Дрейф во времени | Гироскопы в инерциальных измерительных блоках (IMU) со временем накапливают дрейф , что приводит к неточным измерениям, если их не калибровать регулярно. Это существенная проблема в приложениях с длительным временем работы. |
| Чувствительность к окружающей среде | Инерциальные измерительные блоки (IMU) чувствительны к условиям окружающей среды, таким как температура и вибрации, которые могут приводить к ошибкам, особенно в MEMS-IMU , которые более подвержены этим помехам. |
| Высокая стоимость (для высокоточных моделей) | Хотя MEMS-инерциальные измерительные блоки (IMU) являются экономически эффективными, высокоточные IMU, такие как FOG-IMU, дороги и могут не подходить для всех применений из-за высокой стоимости и энергопотребления. |
| Краткосрочная точность против долгосрочной стабильности | Инерциальные измерительные блоки (IMU) обеспечивают высокую точность в краткосрочной перспективе, но без внешней коррекции (например, GPS) они подвержены долговременной нестабильности, что является проблемой для задач высокоточной навигации в течение длительных периодов времени. |
| Сложность в слиянии данных | блоки (IMU) часто требуют объединения данных с различных датчиков (например, интеграции GPS, магнитометров), что усложняет систему и увеличивает вычислительную нагрузку. |
| Ограниченная точность в условиях высокой динамики | В условиях высокой динамики работы MEMS-инерциальные измерительные блоки (IMU) могут не соответствовать точности волоконно-оптических инерциальных измерительных блоков (FOG IMU) , особенно в таких приложениях, как наведение ракет или ориентация космических аппаратов , которые требуют сверхвысокой точности. |
Инерциальный измерительный блок (IMU) против других инерциальных систем: IMU против AHRS, IMU против INS
Инерциальные измерительные блоки (ИМБ) играют важную роль во многих высокотехнологичных приложениях, но это не единственные системы, доступные для измерения движения, ориентации и навигации. Системы определения положения и курса (AHRS) и инерциальные навигационные системы (INS) — это две другие широко используемые системы, которые также используют инерциальные датчики. Хотя ИТБ предоставляют основные данные для AHRS и INS, эти системы обладают дополнительными возможностями и разработаны для конкретных сценариев использования. Давайте рассмотрим, чем ИТБ отличаются от AHRS и INS.
IMU против AHRS (системы определения положения и курса)
измерительные блоки (IMU) и системы адаптивной радиолокации (AHRS) используются для отслеживания ориентации и движения, но различаются по дополнительным функциям и областям применения.
| Параметр | ИМУ | АХРС |
|---|---|---|
| Определение | Инерциальный измерительный блок (ИМБ) измеряет ускорение и угловую скорость, предоставляя исходные данные о движении. | Система определения ориентации и курса (AHRS) объединяет данные инерциального измерительного блока (IMU) с данными дополнительных датчиков (например, магнитометров) для получения информации об ориентации и курсе. |
| Компоненты | Обычно включает в себя **акселерометры** и **гироскопы**, иногда **магнитометры**. | Использует данные инерциального измерительного блока (IMU) (акселерометры и гироскопы), а также магнитометры и иногда другие датчики (например, GPS, барометры). |
| Выход | Предоставляет исходные данные об ускорении и угловой скорости. | Выводит ориентацию (положение тела) и направление (направление по компасу) в глобальной системе координат (например, Север, Восток, Вниз). |
| Точность | Инерциальные измерительные блоки (IMU) обеспечивают точное отслеживание движения, но со временем могут подвергаться **дрейфу** из-за ошибок датчиков. | Система AHRS повышает точность за счет использования внешних эталонных данных (магнитометров, GPS), что снижает дрейф со временем. |
| Сложность | Более простая конструкция, как правило, предназначена для базового отслеживания движения. | Более сложная структура из-за дополнительных факторов |
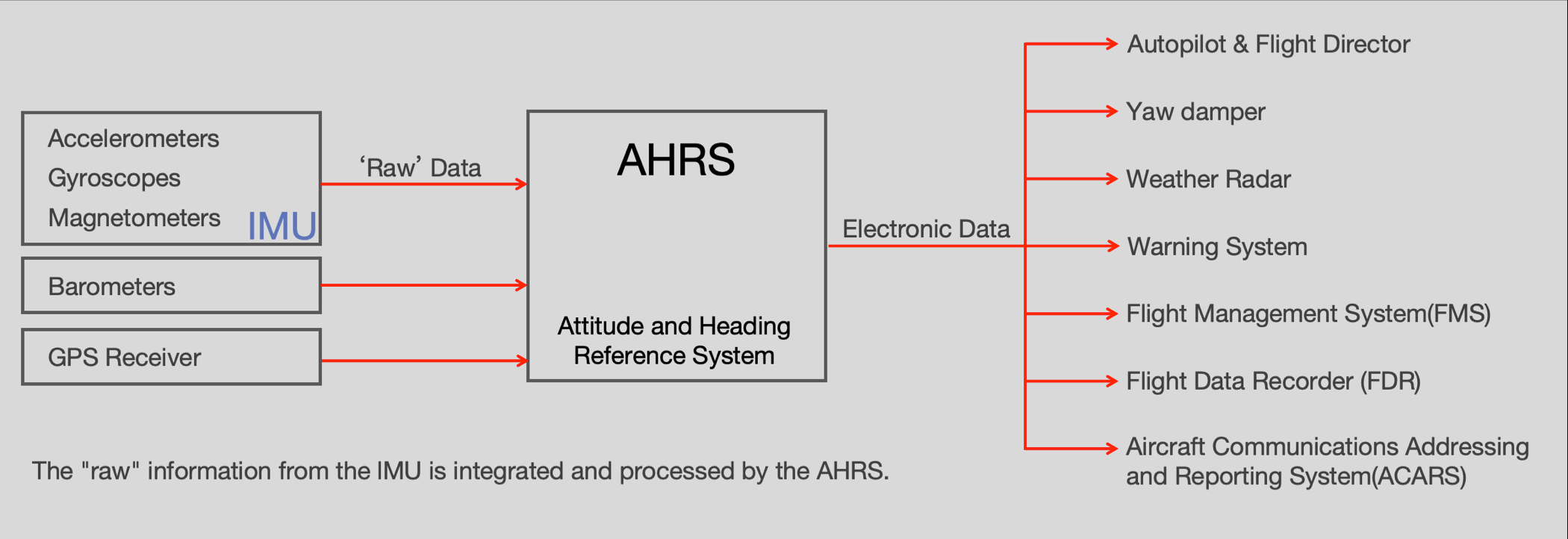
Ключевое различие: блоки (IMU) предоставляют необработанные данные с датчиков, в то время как система AHRS объединяет эти данные с данными других датчиков (например, магнитометров) для обеспечения точной ориентации и курса. Система AHRS обычно используется, когда требуется точная информация об ориентации и курсе.
Инерциальный измерительный блок (IMU) против инерциальной навигационной системы (INS)
Инерциальная навигационная система (ИНС) — это более совершенная система, которая интегрирует инерциального измерительного блока (ИМБ) с дополнительными возможностями обработки, часто используя алгоритмы , как фильтр Калмана, для вычисления положения, скорости и ориентации объекта.
| Параметр | ИМУ | ИНС |
|---|---|---|
| Определение | Инерциальный измерительный блок (ИМБ) измеряет ускорение и угловую скорость, предоставляя исходные данные о движении. | Инерциальная навигационная система (ИНС) объединяет инерциальный измерительный блок (ИМУ) с вычислительной обработкой (например, фильтром Калмана) для отслеживания положения, скорости и ориентации. |
| Компоненты | Включает в себя **акселерометры** и **гироскопы**; иногда **магнитометры**. | Объединяет **интермодуляционный блок**, **алгоритмы** для объединения данных с датчиков, а иногда и другие датчики (например, **GPS**). |
| Выход | Предоставляет данные об ускорении и угловой скорости. | Выводит **положение**, **скорость** и **ориентацию**, предоставляя полные данные для навигации. |
| Точность | Точность инерциальных измерительных блоков (IMU) со временем снижается из-за дрейфа. | **ИНС** повышает точность со временем за счет объединения данных ИМУ с алгоритмами и иногда с внешними корректировками (например, GPS). |
| Сложность | Просто, предоставляются только данные о движении. | Сложность обусловлена объединением данных, обработкой данных с датчиков и необходимостью применения вычислительных алгоритмов. |
| Приложения | Используется для базового отслеживания движения, например, в дронах, автомобильной промышленности и робототехнике. | Используется для **навигации** в **самолетах**, **подводных лодках**, **космических аппаратах** и **военных целях**, где критически важно долговременное отслеживание местоположения. |
Ключевое отличие: в то время как инерциальные измерительные блоки (IMU) измеряют движение и ориентацию, инерциальная навигационная система (INS) использует эти данные вместе с алгоритмами для расчета положения, скоростии ориентации во времени, обеспечивая полноценное навигационное решение.
Рынок инерциальных измерительных блоков и перспективы его развития: типы, рыночные перспективы и тенденции
Инерциальные измерительные блоки (ИМБ) играют важную роль в современных системах навигации, отслеживания движения и управления устойчивостью в различных отраслях промышленности. Растущий спрос на автономные системы, робототехнику, аэрокосмическую отрасльи бытовую электронику стимулировал развитие технологий ИТБ, способствуя их широкому внедрению во всем мире. Поскольку рынок ИТБ продолжает расширяться, крайне важно понимать различные типы ИТБ, их текущее рыночное положение и тенденции, определяющие их будущее развитие.
Различные типы инерциальных измерительных блоков (IMU) и обзор их рынка
Инерциальные измерительные блоки (IMU) бывают разных типов, каждый из которых отвечает различным требованиям к точности, размеру, стоимости и производительности. Наиболее распространенными типами IMU являются MEMS IMU, FOG IMUи RLG IMU (кольцевые лазерные гироскопические IMU). Каждый из них имеет свои уникальные характеристики, что делает его подходящим для конкретных применений. Рассмотрим эти типы и их текущую рыночную ситуацию.
1. MEMS-инерциальные измерительные блоки (IMU)
MEMS-инерциальные измерительные блоки (IMU) являются наиболее широко используемыми благодаря своим компактным размерам, низкой стоимостии низкому энергопотреблению. Эти IMU используют микроэлектромеханические системы (MEMS) для измерения ускорения и угловой скорости. MEMS-инерциальные измерительные блоки отлично подходят для бытовой электроники, автомобильной промышленности и недорогих систем.
| Характерный | MEMS IMU |
|---|---|
| Размер | Компактный, небольшой и легкий. |
| Расходы | Низкая стоимость делает их доступными для массового рынка. |
| Точность | Умеренная точность, хотя более новые модели обеспечивают более высокую точность (например, **0,1°/час**). |
| Приложения | Используется в **бытовой электронике**, **автомобильных системах**, **дронах**, **робототехнике** и **носимых устройствах**. |
| Рост рынка | Устойчивый рост обусловлен развитием **смартфонов**, **автомобильной безопасности**, **технологий беспилотных летательных аппаратов** и **устройств Интернета вещей**. |
Прогноз рынка инерциальных измерительных блоков MEMS:
Ожидается, что рынок инерциальных измерительных блоков (IMU) на основе MEMS-технологии продолжит расти благодаря их доступности и универсальности. Эти IMU все чаще используются в смартфонах , носимых устройствах , системах безопасности автомобилей , системах стабилизации дронов и робототехнике . Автомобильная промышленность и сектор потребительской электроники остаются ключевыми драйверами роста, чему способствует растущее внедрение беспилотных автомобилей и устройств Интернета вещей (IoT)
2. Инерциальные измерительные блоки на основе волоконно-оптического гироскопа (FOG IMU)
основе волоконно-оптических гироскопов (FOG IMU) отличаются высокой точностью и низким дрейфом, что делает их идеальными для аэрокосмической, обороннойи навигационной отраслей в условиях, требующих долговременной стабильности и точности. FOG используют волоконно-оптическую технологию для измерения угловой скорости и известны своей надежностью в экстремальных условиях.
| Характерный | ИМУ для тумана |
|---|---|
| Размер | Более крупные и надежные, чем MEMS-инерциальные измерительные блоки, разработаны для высокоточных приложений. |
| Расходы | Более высокая стоимость делает их пригодными для специализированных применений в **аэрокосмической** и **военной** отраслях. |
| Точность | **Высокая точность** с минимальным дрейфом, идеально подходит для **долговременной стабильности** в **аэрокосмической**, **оборонной** и **навигационных** системах. |
| Приложения | Используется в **аэрокосмической отрасли**, **военной обороне**, **высокотехнологичных навигационных системах** и **системах точного наведения**. |
| Рост рынка | Устойчивый рост в аэрокосмическом, военном и высокоточном навигационном секторах, но сдерживаемый высокими затратами. |
Прогноз рынка инерциальных измерительных блоков для FOG:
Ожидается, что рынок инерциальных измерительных блоков на основе волоконно-оптических гироскопов (FOG IMU) будет стабильно расти в аэрокосмической отрасли , военной обороне и высокоточных навигационных приложениях. Растущий спрос на автономные транспортные средства , освоение космоса и системы наведения ракет будет способствовать внедрению FOG IMU. Однако их высокая стоимость и энергопотребление остаются ограничивающими факторами для более широкого проникновения на рынок, особенно в недорогих потребительских приложениях.
3. Кольцевые лазерные гироскопические инерциальные измерительные блоки (RLG IMU)
(RLG IMU) похожи на инерциальные (FOG IMU) , но используют кольцевые лазерные гироскопы для измерения угловой скорости. RLG IMU известны своей чрезвычайно высокой точностью и стабильностью и часто используются в военной, аэрокосмической и других высокопроизводительных отраслях.
| Характерный | RLG IMU |
|---|---|
| Размер | Подобно **инерциальным измерительным блокам FOG**, эти устройства **больше по размеру** и более прочные, разработаны для **высокоточных приложений** в суровых условиях. |
| Расходы | **Очень высокая стоимость**, обычно используется в премиальных, критически важных системах в **аэрокосмической** и **военной** отраслях. |
| Точность | **Чрезвычайно высокая точность** с минимальным дрейфом, часто используется в системах **навигации космических аппаратов** и **системах наведения военных ракет**. |
| Приложения | Используется в **военных**, **космических**, **спутниковой навигации** и других **высокоточных системах обороны**. |
| Рост рынка | Несмотря на свою нишевую направленность, **инерциальные измерительные блоки на основе лазерного излучения** по-прежнему имеют решающее значение для **высокоэффективных оборонных**, **аэрокосмических** и **космических** систем. Рынок стабилен и демонстрирует умеренный рост из-за высоких затрат. |
Прогноз рынка инерциальных измерительных блоков RLG:
Хотя инерциальных измерительных блоков на основе лазерных гироскопов (RLG IMU) ограничен из-за их высокой стоимости, они остаются крайне важными для военных, оборонных и аэрокосмических применений, особенно для наведения ракет и ориентации спутников. RLG IMU будут продолжать играть важнейшую роль в этих секторах, но могут столкнуться с конкуренцией со стороны IMU на основе волоконно-оптических гироскопов (FOG IMU) и новых технологий.
Будущие тенденции и развитие инерциальных измерительных блоков
Будущее инерциальных измерительных блоков (IMU) определяется рядом ключевых разработок, обусловленных прогрессом в сенсорных технологиях, алгоритмах обработки данных и растущим спросом на высокоточные системы в различных отраслях промышленности. Вот некоторые из ключевых тенденций:
1. Миниатюризация и интеграция с другими датчиками
По мере роста спроса на компактные и эффективные системы наблюдается тенденция к миниатюризации инерциальных измерительных блоков (IMU) . MEMS-IMU будут продолжать развиваться, становясь еще меньше, экономичнее и мощнее. Кроме того, важной областью развития является объединение данных с других датчиков, таких как магнитометры , GPS и барометры , для повышения производительности и точности.
2. Высокая точность при более низкой стоимости
Последние достижения в MEMS IMU стимулируют тенденцию к достижению высокой точности при снижении стоимости. Такие модели, как GUIDE900 и GUIDE900A, теперь могут достигать 0,1°/час и 0,05°/час , сокращая разрыв с IMU на основе волоконно-оптических гироскопов (FOG). Это означает, что MEMS IMU будут использоваться в большем количестве высокоточных приложений, включая аэрокосмические и военные системы, в которых традиционно доминировали IMU на основе волоконно-оптических гироскопов.
3. Интеграция в автономные системы
Инерциальные измерительные блоки (IMU) играют важную роль в разработке автономных транспортных средств, дронови робототехники. Растущий интерес к автономной навигации и точному управлению движением будет стимулировать спрос на передовые IMU. Интеграция IMU с алгоритмами искусственного интеллекта и машинным обучением позволяет системам более эффективно адаптироваться к реальным условиям.
4. Использование ИИ и объединения данных с датчиков
Алгоритмы искусственного интеллекта будут играть все более важную роль в обработке данных с инерциальных измерительных блоков (IMU). Благодаря объединению данных IMU с данными других датчиков и использованию машинного обучения, автономные системы смогут делать более точные прогнозы и корректировки. Ожидается, что сочетание IMU с такими технологиями, как системы машинного зрения, LiDARи радар, расширит границы возможностей навигации и стабилизации в реальном времени.
5. Повышенная долговечность и устойчивость к воздействию окружающей среды
Ожидается, что инерциальные измерительные блоки (IMU) станут еще более надежными и устойчивыми к суровым условиям, таким как экстремальные температуры, вибрация и электромагнитные помехи. Инерциальные измерительные блоки на основе волоконно-оптических гироскопов (FOG IMU) и микроэлектромеханических систем (MEMS IMU) будут развиваться, чтобы удовлетворить растущий спрос в аэрокосмической, обороннойи промышленной отраслях.
