Инерциальные датчики по своей природе несовершенны. Дрейф смещения, случайное блуждание и чувствительность к температуре — это не аномалии, а ожидаемое поведение. Важно не устранять эти ошибки, а управлять ими.
За эти годы я понял, что надежная инерциальная навигация зависит не только от характеристик датчика, но и от того, насколько хорошо вы понимаете и компенсируете эти недостатки. Независимо от того, используете ли вы MEMS или FOG, успех зависит от того, что происходит после того, как датчик начинает передавать данные.
инерциальной навигации в конечном итоге ограничивается тем, насколько хорошо смоделированы и компенсированы ошибки датчиков. От дрейфа смещения до случайного блуждания , эффективное смягчение последствий требует сочетания аппаратной конструкции, процедур калибровки и алгоритмической коррекции в реальном времени.
Инерциальная навигация не ограничивается только аппаратным обеспечением. Производительность оборудования определяет нижний предел, но максимальный предел определяется тем, насколько эффективно обрабатываются ошибки.
Оглавление
Почему компенсация ошибок является настоящим узким местом в инерциальной навигационной системе?
Инерциальные навигационные системы обычно не выходят из строя внезапно — они постепенно деградируют . То, что начинается как крошечное смещение в гироскопе или небольшое отклонение в акселерометре, медленно превращается в нарастающую ошибку в ориентации, скорости и положении . Я видел, как точность ИНС снижалась с субметровой до непригодной для использования за считанные минуты — не из-за неисправности датчиков, а из-за того, что ошибка не была устранена .
Независимо от того, насколько точным заявлено ваше инерциальное измерительное устройство (IMU) на бумаге, некомпенсированная инерциальная навигационная система (INS) всегда будет иметь дрейф . А в условиях отсутствия сигнала GNSS этот дрейф становится критически важным. Эффективная компенсация — это не дополнительная функция, а основа надежной работы INS .
Классификация ошибок инерциальной навигационной системы: что можно смоделировать, а что нет
При работе с инерциальными навигационными системами одним из первых вопросов, на который я обращаю внимание, является динамика ошибок во времени. Некоторые из них предсказуемы, другие — нет. И эта разница имеет большое значение, когда речь идёт о компенсации.
Систематические ошибки: предсказуемые и исправимые.
Эти проблемы могут повторяться с течением времени и при изменении температуры, если их не устранить:
- Дрейф смещения в гироскопах и акселерометрах
- Нелинейность масштабного коэффициента
- Незначительные смещения между осями датчиков
- Термочувствительность, изменяющая выходной сигнал в зависимости от окружающей среды
При наличии отлаженной процедуры калибровки эти ошибки обычно можно измерить один раз и последовательно компенсировать — при условии, что ваши условия остаются в допустимых пределах.
Случайные ошибки: непредсказуемы, но поддаются описанию.
Кроме того, существуют ошибки, которые нельзя устранить, их можно только смоделировать. К ним относятся:
- Угловое случайное блуждание (ARW)
- Случайное блуждание по скорости (VRW)
- белый шум датчика
- Артефакты, вызванные вибрацией, особенно на мобильных платформах
Вывод: систематические ошибки решаются в лаборатории. Со случайными ошибками борются в полевых условиях.
Как ошибки инерциальной навигационной системы (ИНС) распространяются со временем?
Прежде чем говорить о компенсации, важно понять, как ошибки на самом деле ведут себя внутри инерциальной навигационной системы (ИНС). Они не просто появляются — они растут, накапливаются и взаимодействуют с динамикой системы таким образом, который часто недооценивается. Давайте разберем, как это происходит.
Небольшие ошибки не остаются небольшими.
В инерциальной навигационной системе даже небольшое смещение гироскопа или ошибка ускорения в микрограммы будут со временем увеличиваться. Это происходит потому, что ИНС работает путем интеграции данных датчиков, а это значит, что любая ошибка накапливается на каждом шаге.
Интеграция — это множитель.
Изменение ориентации влияет на скорость. Ошибка в определении скорости, в свою очередь, влияет на положение. Именно эта цепная реакция объясняет, почему система с, казалось бы, хорошими характеристиками на бумаге может смещаться на сотни метров даже после 30 минут отсутствия сигнала GNSS.
Профиль движения имеет огромное значение. Очень большое.
Способ движения вашей системы будет влиять на то, какие ошибки будут преобладать. На статических платформах преобладают долговременное смещение и тепловой дрейф. В высокодинамичных системах, таких как дроны, ракеты или скоростные вездеходы, нелинейность масштабного коэффициента и временная задержка становятся более критичными, чем само смещение.
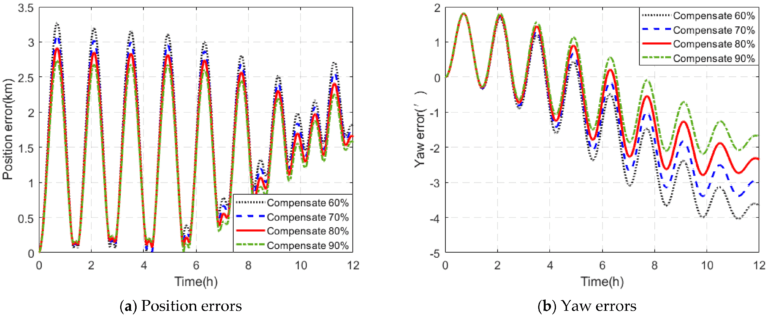
Длительные миссии усиливают все эффекты.
Будь то 12-часовой маршрут обследования или 2-минутный полет ракеты, чем дольше ваша инерциальная навигационная система работает без коррекции, тем важнее становится моделирование ошибок.
Моделирование ошибок датчиков для эффективной компенсации
Прежде чем что-либо исправлять в инерциальной навигационной системе (ИНС), необходимо понять, что именно вы исправляете. Смещение, дрейф и шум датчика — это не ошибки, а особенности его работы. И если вы не смоделируете их должным образом, ваша стратегия компенсации будет лишь гаданием.
Обычно я использую четыре основных метода моделирования. Каждый из них нацелен на разные типы ошибок, и вместе они дают четкое представление о том, как будет вести себя ваша система — не только в лаборатории, но и в полевых условиях.
| Метод моделирования | Основная цель | Устранены типы ошибок | Почему это важно |
|---|---|---|---|
| Аллан Дисперсия | Проанализируйте, как изменяется уровень шума датчика с течением времени | ARW, нестабильность смещения, случайный дрейф | Незаменим для настройки фильтров и калибровки датчиков |
| Шестипозиционная калибровка | Оцените фиксированные смещения и несоответствия | Смещение, масштабный коэффициент, несовпадение осей | Обеспечивает точное устранение статических ошибок |
| Термокалибровка | Изменение выходных данных карты в зависимости от температуры | Смещение, вызванное температурой, и дрейф усиления | Критически важен для реальных условий эксплуатации на открытом воздухе и для мобильных платформ |
| Анализ PSD | Понимание шума датчика по частоте | Белый шум, дрейф низких частот | Предоставляет информацию для проектирования фильтра без подавления реального движения |
Совет: Прежде чем доверять своей инерциальной навигационной системе (INS) в любой миссии, где отсутствует сигнал GNSS или которая длится долго, используйте как минимум три из этих методов.
Аппаратные методы снижения ошибок
Хорошее программное обеспечение не может спасти плохое оборудование. В инерциальных навигационных системах механические, тепловые и электрические конструктивные решения напрямую влияют на долговременную стабильность . Это основные методы, на которые я полагаюсь при создании надежных платформ ИНС.
- Виброизоляция крайне важна.
Нефильтрованные механические вибрации создают ложные сигналы движения. Использование настроенных изоляторов или правильно демпфированных креплений датчиков может значительно снизить высокочастотный шум, особенно на гусеничной технике или вертолетах.
- Термостабильность обеспечивает корректность калибровки.
Выходной сигнал датчика изменяется в зависимости от температуры. Пассивная изоляция или активный нагрев могут помочь поддерживать рабочую температуру в диапазоне, для которого вы произвели калибровку.
- Помехи в электропитании превращаются в помехи в сигнале.
Пульсации напряжения и электромагнитные помехи вызывают едва заметные, но устойчивые искажения аналоговых и цифровых сигналов. Я всегда использую чистые линии питания, малошумящие стабилизаторы и строгое разделение аналоговых и цифровых сигналов.
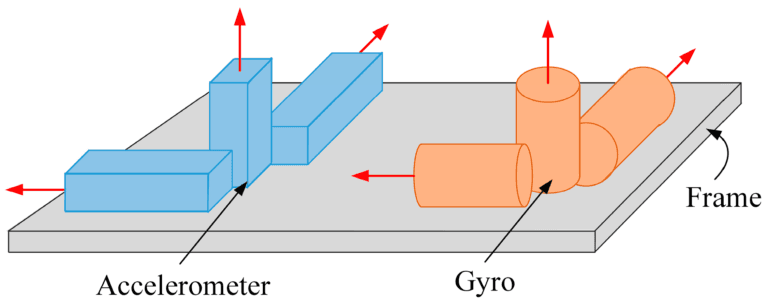
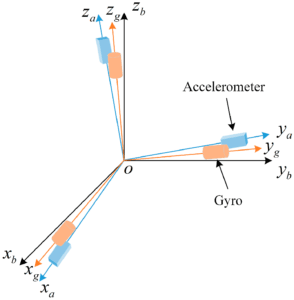
- Точность монтажа влияет на выравнивание.
Даже незначительные механические смещения могут привести к существенным ошибкам в определении положения и скорости. Используйте жесткие, изготовленные на станках кронштейны и тщательно контролируйте ориентацию и крутящий момент инерциального измерительного блока (IMU).
- Используйте датчики, соответствующие поставленной задаче.
Не стоит просто выбирать «лучший» датчик — выбирайте тот, который соответствует вашему допустимому уровню погрешности. При длительных перебоях в работе GNSS стабильность смещения имеет первостепенное значение. Для быстрых платформ приоритетными являются низкий уровень ARW и пропускная способность.
В итоге: наилучшие инерционные характеристики начинаются задолго до сбора данных — всё зависит от того, как вы крепите датчик к раме.
Методы компенсации на основе программного обеспечения
Как только аппаратная часть стабилизируется, управление переходит к программному обеспечению. Именно здесь происходит большая часть контроля дрейфа , и именно здесь хорошая модель может заставить даже самый простой датчик работать как отличный. Вот как я подхожу к этому на практике:
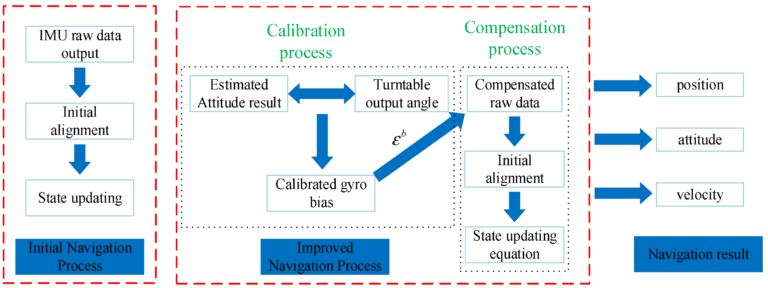
- Начните с правильной калибровки.
Для измерения смещения, масштабного коэффициента, несовпадения и температурной зависимости используйте статические и динамические методы. Без хорошей базовой калибровки все остальное — это лишь предположения.
- Используйте фильтры, соответствующие вашей динамике.
Расширенные фильтры Калмана (EKF), нелинейные фильтры Калмана (UKF) или дополнительные фильтры — выбирайте в зависимости от профиля движения и доступных вспомогательных источников. Неправильная структура фильтра хуже, чем его отсутствие.
- Компенсация температурного воздействия не подлежит обсуждению.
Независимо от того, используете ли вы волоконно-оптический гелиевый датчик (FOG) или инерциальный измерительный блок (MEMS IMU), поведение датчика изменяется с температурой. Коррекция в реальном времени с использованием внутренних или внешних датчиков температуры может уменьшить дрейф на порядок.
- Адаптивная фильтрация повышает выживаемость.
В многоэтапных миссиях (например, запуск, крейсерский полет, спуск) характеристики шума датчиков меняются. Адаптивная настройка фильтра — на основе данных о скорости, вибрации или окружающей среде — позволяет вашей системе корректироваться по мере необходимости.
- Коррекция с обратной связью позволяет удерживать параметры в заданных пределах.
Используйте обновления данных GNSS, одометрии, барометра или магнитометра для ограничения роста ошибок. Даже низкочастотная коррекция каждые несколько секунд значительно повышает производительность в задачах с длительным временем выполнения.
Самое важное: программное обеспечение не может изобрести точность, но оно может защитить её , расширить её и восстановить, когда что-то пойдёт не так. И именно это должна делать хорошая инерциальная навигационная система (ИНС).
Роль объединения данных с различных датчиков в подавлении дрейфа инерциальной навигационной системы
Даже самая лучшая инерциальная навигационная система будет иметь дрейф — это не недостаток, это закон физики . Настоящий вопрос заключается в том, как ограничить этот дрейф, используя данные других датчиков. Именно здесь объединение данных с датчиков становится самым мощным инструментом в системе.
GNSS + INS: классическое решение
Когда данные GNSS доступны, даже с перебоями, они обеспечивают обновление абсолютного положения для ограничения дрейфа инерциальной навигационной системы.
Лучше всего подходит для: длительных миссий, мобильного картографирования, БПЛА.
Преимущества: точная коррекция, отработанные фильтры (EKF).
Предостережение: уязвимость к помехам, обрывам сигнала и многолучевому распространению.
Гибридная технология FOG + MEMS: баланс между точностью и стоимостью
Сочетание стабильного волоконно-оптического гироскопа с быстродействующими MEMS-устройствами позволяет получить лучшее из обоих миров — низкий дрейф и быструю реакцию.
Наилучшим образом подходит для: беспилотных летательных аппаратов среднего размера, военно-морских платформ, роботизированных систем.
Преимущество: лучшее значение ARW + меньший SWaP
Предостережение: требуется тщательная интеграция и перекрестная калибровка.
Визуализация / Лидар + ИНС: непрерывность работы без GNSS
Визуальная одометрия или LiDAR SLAM могут предоставлять данные об относительном положении в тех случаях, когда GNSS недоступна, например, в помещениях или под землей.
Лучше всего подходит для: беспилотных автомобилей, туннелей, складов, шахт.
Преимущество: полная автономность.
Примечание: необходима прямая видимость, чувствительно к освещению или плотности объектов.
Синхронизация — это всё. Технология Fusion работает только при синхронизации датчиков. Несовпадающие метки времени приносят больше вреда, чем пользы.
На практике: Fusion — это не добавление новых датчиков, а умение определить, какому из них можно доверять в нужный момент.
Подход GuideNav к обеспечению надежности инерциальной навигационной системы
После всего, что я видел в полевых условиях — на беспилотных летательных аппаратах, исследовательских судах, морских системах — остается неизменным одно: реальная эффективность инерциальной навигационной системы зависит от всего, что находится вокруг датчика .
В GuideNav мы уделяем этому именно основное внимание.
- Каждый прибор проходит полную калибровку по температуре и осям , а не просто тестируется в рамках партии.
- Мы предоставляем реальные данные о дисперсии Аллана и поддержку в настройке фильтров, а не просто технические характеристики.
- Наши модели FOG и MEMS поставляются с готовыми к интеграции инструментами : стабильная синхронизация, понятные интерфейсы и поддержка термоядерного синтеза.
- А поскольку на не распространяется действие ITAR (правил регулирования в сфере информационных технологий и технологий) , они готовы к глобальному внедрению в оборонных, промышленных или исследовательских программах.
Вы получаете не просто датчик — вы получаете надежную навигационную платформу, когда другие системы выходят из строя.