Автономные транспортные средства не могут безопасно передвигаться, не зная своего точного местоположения, — однако обычная GPS-навигация с погрешностью 1–3 м слишком груба для принятия решений на уровне полосы движения. В городских каньонах или туннелях сигналы полностью пропадают, оставляя систему «вслепую». Для достижения точности на уровне сантиметра современные платформы автономного вождения используют многосенсорное объединение, сочетая GNSS, IMU, LiDAR и визуальное восприятие для обеспечения непрерывной и надежной локализации в любых условиях движения.
Автономные транспортные средства достигают точности на уровне сантиметров благодаря интеграции GNSS/INS, лидарному картографированию и визуальному восприятию, а высокоточные инерциальные измерительные блоки (IMU) составляют основу локализации в случае сбоя сигнала GPS.
Локализация — это невидимая основа автономного вождения. Она точно указывает автомобилю его местоположение, даже когда спутники исчезают. Благодаря объединению данных IMU, GNSS, LiDAR и камер, современные системы поддерживают точное позиционирование на любой дороге, в туннеле и городском каньоне.
Оглавление
Основные технологии, лежащие в основе автономной локализации
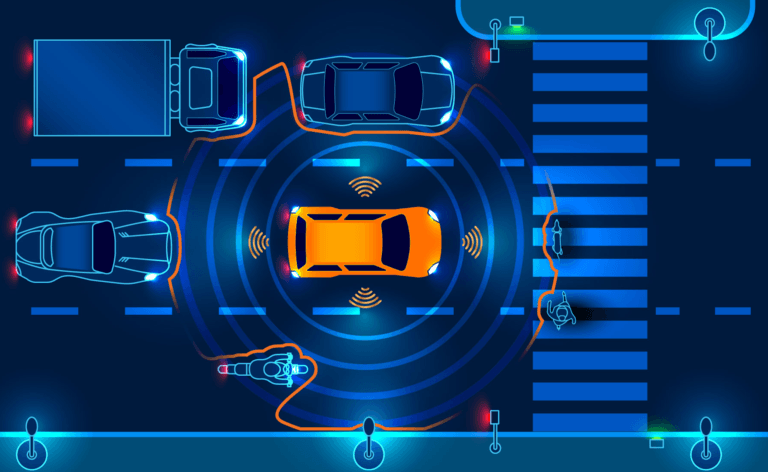
Современная система определения местоположения для автономного вождения объединяет четыре основные сенсорные технологии, каждая из которых играет уникальную роль в восприятии и навигации:
- GNSS (глобальная навигационная спутниковая система): предоставляет глобальные координаты и абсолютную привязку к местоположению.
- ИНС (инерциальная навигационная система): отслеживает движение с помощью акселерометров и гироскопов, компенсируя потери сигнала GNSS.
- LiDAR (Light Detection and Ranging): Создает трехмерные карты окружающей среды для пространственного сопоставления с точностью до сантиметра.
- Системы машинного зрения: Использование камер для распознавания разметки полос движения, дорожных знаков и ориентиров с целью семантического понимания.
Вместе эти системы создают избыточную, взаимодополняющую архитектуру , которая обеспечивает точную локализацию в сложных условиях дорожного покрытия, погоды и освещения. Однако среди них GNSS остается отправной точкой — и ее ограничения показывают, почему интеграция данных имеет важное значение.
Почему одной лишь GNSS недостаточно для создания автономных автомобилей
Стандартная GPS-навигация обеспечивает точность всего 1–3 м — это подходит для телефонов, но губительно для беспилотных автомобилей . Даже небольшое отклонение может привести к выезду автомобиля за пределы полосы движения или неправильному определению поворота.
В городских каньонах или туннелях сигналы отражаются или полностью исчезают, создавая непредсказуемые скачки, известные как ошибки многолучевого распространения навигацию ненадежной, что доказывает необходимость объединения данных с датчиков для непрерывной локализации с точностью до сантиметра .
Повышение точности GNSS для автономного вождения
Для повышения точности стандартных GPS-сигналов автономные системы используют усовершенствованные методы коррекции GNSS, такие как RTK . Получая данные об ошибках в реальном времени от опорных станций , эти системы могут достигать точности 5–10 см , что позволяет осуществлять позиционирование на уровне полосы движения .
Однако, GNSS по-прежнему необходимы ясная видимость и стабильная связь . В туннелях или городских районах сигналы ослабевают или пропадают, что доказывает недостаточность спутникового позиционирования и необходимость поддержки инерциальной навигационной системы (INS) для непрерывной локализации .
При сбое GNSS, инерциальная навигационная система (INS) продолжает отслеживать ситуацию в транспортном средстве
Когда спутники исчезают, инерциальной навигационной системе (ИНС) . Используя бортовой инерциальный измерительный блок (ИМУ) , она отслеживает движение по ускорению и угловой скорости, позволяя аппарату определять свое местоположение с точностью до секунды даже без внешних сигналов.
Эта независимость делает инерциальную навигационную систему (ИНС) мостом через туннели, подземные переходы или городские каньоны. Однако ошибки накапливаются со временем, вызывая постепенный дрейф . Для поддержания точности ИНС должна постоянно корректироваться с помощью GNSS или других датчиков, таких как LiDAR и камеры .
Внутри инерциальной навигационной системы: ядро инерциальной локализации
Инерциальная навигационная система (ИНС) является основой автономной локализации — автономного навигационного решения, позволяющего транспортным средствам отслеживать свое положение, скорость и ориентацию даже при исчезновении внешних сигналов.
Из чего состоит иммиграционная служба (INS)?
- Три гироскопа измеряют угловую скорость для регистрации вращательного движения.
- Три акселерометра измеряют линейное ускорение по всем осям.
- Вместе эти датчики образуют инерциальный измерительный блок (ИМБ) , который непрерывно в режиме реального времени отслеживает каждое незначительное движение транспортного средства.
Как работает инерциальная навигационная система (ИНС)
Интегрируя измерения инерциального измерительного блока (IMU), инерциальная навигационная система (INS) вычисляет ориентацию, скорость и положение относительно исходной точки отсчета. Даже когда сигналы GNSS исчезают , система продолжает оценивать движение методом инерциальной навигации , обеспечивая плавный и непрерывный вывод данных о местоположении.
Почему качество INS имеет значение
Точность инерциальной навигационной системы (ИНС) зависит от характеристик датчика, включая стабильность смещения , случайное смещение по углу (ARW) и температурную компенсацию . Высококачественная ИНС поддерживает точность менее метра в течение длительного времени в условиях отсутствия GNSS , обеспечивая стабильную навигацию в туннелях, городах и на закрытых маршрутах.
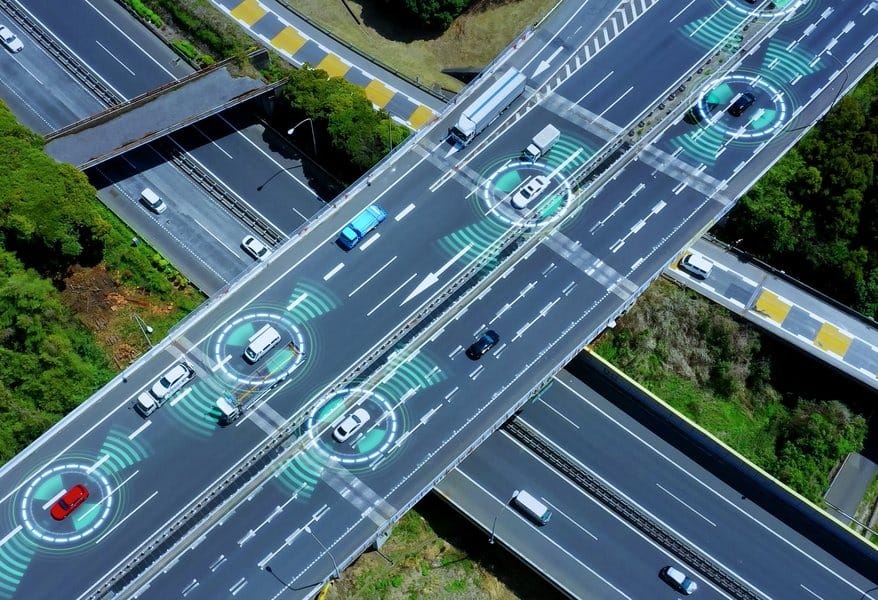
Интеграция INS и GNSS: золотой стандарт отрасли
Взаимодополняющие сильные стороны
Ни одна из систем не может идеально функционировать в одиночку.
GNSS обеспечивает глобальное позиционирование, но теряет надежность при наличии помех сигнала, в то время как INS обеспечивает непрерывное отслеживание движения, которое постепенно смещается со временем.
Сочетание этих двух факторов позволяет автономным транспортным средствам достигать абсолютной точности и кратковременной стабильности .
Fusion в действии
Благодаря усовершенствованной фильтрации Калмана данные от GNSS и INS объединяются в режиме реального времени:
- При наличии GNSS система непрерывно корректирует дрейф инерциальной навигационной системы.
- При потере сигнала GNSS инерциальная навигационная система (INS) поддерживает точные обновления данных о движении до тех пор, пока не возобновится спутниковый сигнал.
Этот цикл прогнозирования и обновления обеспечивает бесперебойную и надежную локализацию — даже в туннелях или плотных городских каньонах.
Отраслевой стандарт
Эта интеграция стала краеугольным камнем современной автономной навигации .
Хорошо откалиброванная система GNSS/INS обеспечивает точность до сантиметра в динамических условиях, гарантируя как точность, так и надежность во всех условиях движения.
От координат к реальности: как работает математика локализации
Точное определение местоположения зависит от преобразования данных между двумя системами координат — системой координат транспортного средства , которая движется вместе с автомобилем, и системой координат карты , закрепленной на Земле. Используя матрицы вращения или кватернионы , данные датчиков, такие как ускорение и угловая скорость, преобразуются в глобальную систему координат. Без этого выравнивания даже точные датчики будут неправильно считывать движение, вызывая дрейф и ошибку позиционирования.
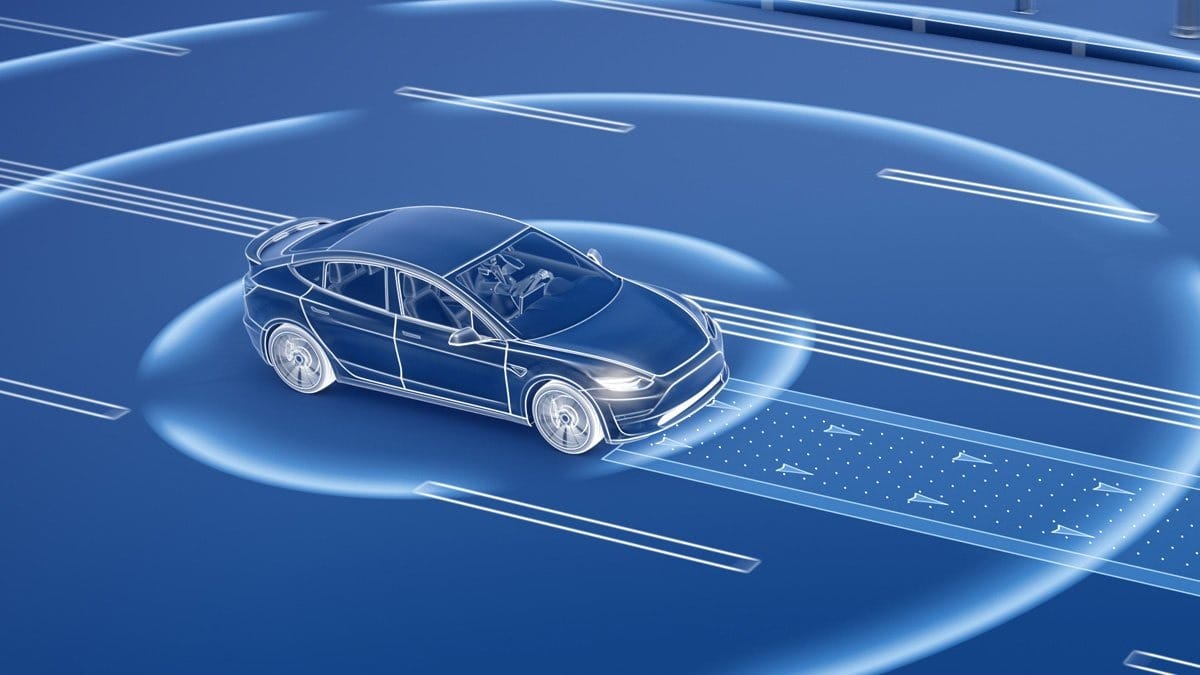
Роль LiDAR в обеспечении точности на уровне сантиметров
Когда GNSS теряет видимость, функцию обработки данных берет на себя LiDAR.
В отличие от спутникового позиционирования, локализация с помощью LiDAR использует трехмерное сканирование в реальном времени, чтобы «видеть» окружающую среду вокруг транспортного средства.
Как это работает:
- Лидар непрерывно излучает лазерные импульсы для создания облаков точек .
- Полученные данные сопоставляются с картой высокого разрешения с использованием таких алгоритмов, как ICP (Iterative Closest Point) или NDT (Normal Distribution Transform) .
- Система минимизирует пространственную погрешность, позволяя оценивать положение и ориентацию с точностью до сантиметра.
Почему это важно:
Этот метод обеспечивает стабильную локализацию в туннелях , городских каньонах или лесных дорогах , где сигналы GNSS ненадежны или полностью теряются.
Увидеть — значит поверить: визуальная локализация и картирование на уровне полос движения
По мере развития систем автономного вождения визуальная локализация стала незаменимым дополнением к GNSS и LiDAR. В то время как спутники обеспечивают глобальный охват, а LiDAR гарантирует геометрическую точность, камеры добавляют контекст и смысл , позволяя транспортным средствам интерпретировать окружающую среду так же, как это делают люди.
Роль зрения в локализации
Визуальные датчики обеспечивают семантическое понимание автономной навигации. Камеры фиксируют разметку полос , дорожные знаки и границы дороги , предоставляя богатый контекст, выходящий за рамки геометрии.
Основной процесс
Полученные изображения сравниваются с картой высокого разрешения . Алгоритмы анализируют визуальные особенности и применяют вероятностную оценку (например, фильтрацию частиц) для определения наиболее вероятного положения транспортного средства.
Главное преимущество
В отличие от LiDAR, который измеряет форму, визуальная локализация интерпретирует смысл. Она обеспечивает точность на уровне полосы движения и повышает устойчивость к изменениям освещения, интенсивности движения или погодных условий.
Какие проблемы по-прежнему ограничивают локализацию в реальном мире?
Даже при использовании передовых технологий интеграции GNSS, IMU, LiDAR и машинного зрения, определение местоположения в реальных условиях по-прежнему сталкивается с серьезными практическими трудностями. Идеальная точность в лабораторных условиях не всегда гарантирует точность на непредсказуемых дорогах.
Динамические среды
Строительство дорог, припаркованные автомобили, пешеходы и временные объекты создают несоответствия между данными датчиков в реальном времени и предварительно созданными картами. Эти несоответствия могут привести к кратковременным ошибкам позиционирования.
обслуживание карт
Карты высокого разрешения требуют постоянного обновления. Сезонные изменения, рост растительности или незначительные корректировки дорожной сети могут снизить точность определения местоположения, если они не отражены в базе данных.
Калибровка датчика
Точное объединение данных зависит от точного выравнивания лидаров, камер и инерциальных измерительных блоков. Даже механические смещения миллиметрового масштаба или тепловое расширение могут вызвать угловое смещение, приводящее к накоплению дрейфа с течением времени.
Почему качество инерциального измерительного блока определяет будущее автономной навигации
Инерциальный измерительный блок (IMU) является последней ступенью обеспечения автономной локализации. Когда GNSS и визуального восприятия снижается, только он позволяет автомобилю отслеживать свое истинное движение. Стабильность любой системы автономного вождения зависит от того, насколько точно IMU может измерять и поддерживать ориентацию во времени.
Высококлассные инерциальные измерительные блоки (IMU) отличаются стабильностью смещения , случайным отклонением по углу (ARW) и тепловой компенсацией . Эти параметры определяют, как долго система может поддерживать точную инерциальную навигацию без внешней коррекции. В то время как датчики потребительского класса могут смещаться на несколько метров за считанные секунды, тактические IMU способны сохранять точность менее метра в течение нескольких минут — это разница между навигацией и путаницей.
По мере развития автономности инерциальный измерительный блок (IMU) остается ее основой. В будущих системах инерциальные датчики будут интегрированы с ИИ-управлением и адаптивным моделированием , но истинная надежность по-прежнему будет основываться на одном ключевом принципе: качество определения движения определяет уверенность в навигации.
