Вы когда-нибудь пытались интегрировать навигационную систему, а потом обнаруживали, что она вообще не показывает местоположение?
Это происходит, когда люди путают инерциальный измерительный блок (IMU) с инерциальной навигационной системой (INS). Звучит технически сложно, но последствия реальны: неправильный выбор оборудования, растраченный бюджет и системы, которые просто не работают должным образом. Решение? Понимание ключевых различий между IMU и INS, а также того, для чего каждый из них предназначен. Это руководство расскажет вам об этом — всё простым языком.
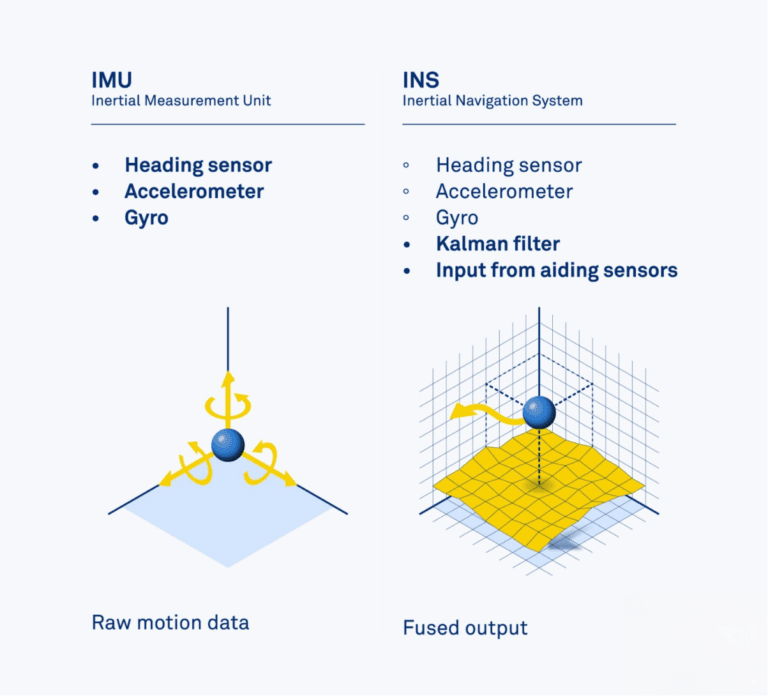
Инерциальный измерительный блок (IMU) измеряет движение, а инерциальная навигационная система (INS) использует данные IMU для вычисления положения и ориентации во времени — IMU является датчиком, INS — системой.
Давайте разберемся в этой путанице — шаг за шагом.
Оглавление

Что такое IMU?
Инерциальный измерительный блок (IMU) — это сенсорное устройство, измеряющее ускорение и угловую скорость . Как правило, IMU создается с использованием технологий MEMS, FOG или HRG и включает в себя акселерометры, гироскопы , а иногда и магнитометры . Он выдает необработанные инерциальные данные, используемые для оценки движения в пространстве. IMU широко используются в БПЛА, робототехнике, транспортных средствах и смартфонах. Однако сами по себе они не обеспечивают определение положения или ориентации , если не интегрированы с дополнительной обработкой данных. Точность IMU варьируется от недорогих коммерческих моделей до тактических и навигационных датчиков, таких как GuideNav GMS400.

Что такое INS (Internal Insight Service)?
Инерциальная навигационная система (ИНС) — это комплексная система, использующая данные инерциального измерительного блока (ИМБ) для расчета положения, скорости и ориентации в реальном времени. Обычно она включает в себя:
- Встроенный инерциальный измерительный блок
- Мощный встроенный процессор
- Алгоритмы слияния данных с датчиков (например, фильтр Калмана )
- Часто используется модуль GNSS для помощи в определении местоположения
ИНС (инерциальная навигационная система) выполняет интеграцию выходных данных ИМУ (инерциального измерительного блока) в реальном времени для обеспечения непрерывного навигационного решения. Благодаря этому она может работать даже в условиях отсутствия GNSS в течение ограниченного времени, что делает ее незаменимой в аэрокосмической, морской и автономной отраслях . Системы, такие как GFS120 и GUIDE2D от GuideNav, являются примером такой интеграции.
Чем отличаются инерциальные измерительные блоки (IMU) и инерциальные навигационные системы (INS)?
Большинство людей упрощают это, говоря: «ИНС — это просто инерциальный измерительный блок с модулем GNSS». Технически, это начало, но далеко не вся картина.
Да, в основе инерциальной навигационной системы (ИНС) лежит инерциальный измерительный блок (ИМУ). Но она также интегрирует процессор, GNSS (часто с поддержкой RTK или SBAS), а иногда и внешние вспомогательные датчики, такие как энкодеры колес, датчики скорости, барометрические высотомеры или доплеровские датчики скорости (DVL) . Эти дополнения позволяют ИНС объединять данные в реальном времени, предоставляя не только информацию о движении, но и высокоточные оценки положения, скорости и ориентации.
Представьте себе инерциальный измерительный блок (IMU) как термометр — он показывает вам необработанные данные. Инерциальная навигационная система (INS) — это сводка погоды: отфильтрованная, объединенная и готовая к использованию.
| Особенность | ИМУ | ИНС |
|---|---|---|
| Основная функция | Измеряет ускорение и вращение | Вычисляет полное положение, скорость и ориентацию |
| Компоненты | Акселерометр, гироскоп | IMU + GNSS + Процессор + Дополнительные датчики |
| Выход | Исходные данные о движении | Объединенные навигационные данные (в реальном времени) |
| Поддержка GNSS | Никто | Встроенный (RTK/SBAS опционально) |
| Внешняя помощь | Непригодный | Одометр, доплеровский измеритель скорости, спидометр, высотомер и т. д. |
Можно ли осуществлять навигацию, используя только инерциальный измерительный блок (IMU)?
Представьте себе, что инерциальный измерительный блок (IMU) — это как ощущение движения с закрытыми глазами. Вы чувствуете, что движетесь вперед или поворачиваете, но понятия не имеете, где находитесь. То же самое происходит, когда вы пытаетесь ориентироваться, используя только IMU.
Конечно, можно интегрировать ускорение по времени, чтобы оценить положение. Но крошечные ошибки быстро накапливаются, превращаясь в огромные просчеты за считанные секунды. Это называется дрейфом, и он делает автономные инерциальные измерительные блоки (IMU) ненадежными для навигации.
Они отлично подходят для кратковременной стабилизации — например, для удержания карданного подвеса в горизонтальном положении — но не для определения вашего местоположения или направления движения. Для этого вам нужна инерциальная навигационная система (ИНС).
Как инерциальная навигационная система обрабатывает данные инерциального измерительного блока (IMU)?
В отличие от инерциального измерительного блока (IMU), который только регистрирует движение, инерциальная навигационная система (INS) интерпретирует это движение и преобразует его в полную навигационную информацию. Это включает в себя знание вашего местоположения, скорости движения и направления взгляда. Но это не происходит автоматически. Для преобразования необработанных сигналов в надежную навигацию требуется цепочка тщательно разработанных шагов, сочетающих физику, математику и коррекцию в реальном времени.
Давайте рассмотрим этот процесс по порядку:
1. Определение движения (входные данные от инерциального измерительного блока)
Все начинается с инерциального измерительного блока (IMU), который непрерывно измеряет ускорение (с помощью акселерометров) и угловую скорость (с помощью гироскопов). Эти значения отражают движение системы в трехмерном пространстве.
➡ На этом этапе инерциальная навигационная система получает информацию о движении.
2. Рассчитайте скорость и положение
ИНС (инерциальная навигационная система) интегрирует ускорение для получения скорости, а затем интегрирует скорость для оценки положения во времени. Это позволяет системе определить, какое расстояние она прошла от начальной точки.
➡ Вот как инерциальная навигационная система отслеживает движение — даже без GPS.
3. Ориентация на оценку
Обрабатывая данные гироскопа и используя в качестве ориентира такие векторы, как гравитация и магнитное поле Земли, инерциальная навигационная система определяет крен, тангаж и рыскание — вашу полную трехмерную ориентацию.
➡ Этот шаг помогает системе понять, как она повернута или наклонена.
4. Применение технологии объединения данных с датчиков для повышения точности
Данные, полученные с помощью инерциального измерительного блока (IMU), со временем изменяются. Инерциальная навигационная система (INS) использует интеллектуальные алгоритмы, такие как фильтры Калмана, для объединения входных данных IMU с данными других датчиков:
- GNSS / RTK / SBAS
- Одометры колес
- Датчики DVL или датчики скорости полета
- Барометрические высотомеры
Эти корректировки значительно повышают точность и долговременную стабильность.
➡ Технология Fusion обеспечивает надежную работу системы даже при потере сигнала некоторыми датчиками.
5. Обеспечивать вывод навигационных данных в реальном времени
В результате получается непрерывный поток данных о положении, скорости и ориентации в реальном времени, обновляемый много раз в секунду и готовый к использованию диспетчерами полетов, автопилотами или картографическими системами.
➡ Именно это делает INS полноценным навигационным решением.
ИНС-системы GuideNav построены на этой архитектуре — с использованием алгоритмов, оптимизированных для условий отсутствия GNSS-сигнала, динамичной среды и платформ с высокой вибрацией. Результат: надежная навигация, которой можно доверять в самые ответственные моменты.
В каких случаях инерциального измерительного блока (IMU) достаточно для вашего приложения?
отслеживать движение инерциальный измерительный блок (IMU) вполне подойдет . Он идеально подходит для ситуаций, когда требуется реагировать на движение, а не отслеживать абсолютное местоположение.
К типичным сценариям использования относятся:
Стабилизация камеры
Обнаруживает вибрацию или наклон, помогая двигателям удерживать камеру в устойчивом положении.
Отслеживание жестов
В дополненной и виртуальной реальности или носимых устройствах вы отслеживаете движение, а не точное положение.
Краткосрочная ориентация
Используется в дронах или роботах во время запуска, зависания или быстрых маневров.
Поддержка управления полетом
В сочетании с GNSS или оптическим потоком инерциальные измерительные блоки (IMU) обеспечивают быструю обратную связь для стабилизации дрона.
Просто имейте в виду: инерциальные измерительные блоки (IMU) предоставляют только данные об ускорении и вращении. Если вам нужны данные об ориентации или скорости, вам придется самостоятельно разработать математические алгоритмы — фильтры, коррекцию дрейфа и многое другое.
Если это в пределах возможностей вашей системы, то инерциальный измерительный блок (IMU) — это лёгкое, доступное и эффективное решение.
Когда вам действительно необходима полная страховка от несчастных случаев (INS)?
Полноценная инерциальная навигационная система (ИНС) необходима, когда вашей системе требуется постоянно точное определение местоположения и ориентации — особенно в условиях, когда GNSS может дать сбой или быть недоступна.
Типичные сценарии использования включают:
- Среды, в которых отсутствует сигнал GNSS: например, туннели, помещения, подводные пространства или городские каньоны.
- Высокодинамичные платформы: такие как дроны, ракеты и внедорожники, требующие быстрых и точных обновлений.
- Расчет по пройденному расстоянию: когда система должна поддерживать навигацию между сигналами GNSS — или вообще без GNSS.
- Задачи, требующие высокой точности: такие как картографирование, наведение на цель или автономное вождение.
В таких ситуациях один только инерциальный измерительный блок (IMU) быстро дрейфовал бы, что приводило бы к ненадежным результатам. Инерциальная навигационная система (INS) решает эту проблему, объединяя инерциальные данные с данными GNSS и дополнительными датчиками, такими как доплеровский измеритель скорости (DVL), одометры или высотомеры.
Какие распространённые ошибки допускают при выборе между инерциальным измерительным блоком (IMU) и инерциальной навигационной системой (INS)?
Давайте будем честны — когда дело доходит до инерциальных датчиков, легко ошибиться, особенно если вы новичок в этой области. Я видел, как команды выбирали не тот инструмент бесчисленное количество раз. И дело редко бывает в технологии — дело в непонимании проблемы.

Вот тут-то обычно и начинаются проблемы:
Ошибка №1: Думать, что инерциальный измерительный блок (IMU) определяет ваше местоположение
Нет. Инерциальный измерительный блок (IMU) показывает только скорость вашего движения или поворота. Если вы надеетесь получать координаты в реальном времени сразу после покупки, вы будете разочарованы.
Ошибка №2: Использование инерциального измерительного блока начального уровня для выполнения сложной задачи
Недорогой датчик может хорошо выглядеть на бумаге, но как только вы установите его на быстро движущийся дрон или робота, шум и дрейф испортят ваши данные.
Ошибка №3: Оплата инерциальной навигационной системы (ИНС), когда инерциальный измерительный блок (ИМУ) решил бы проблему
Если вам нужно всего лишь стабилизировать камеру или определить базовую ориентацию, полноценная инерциальная навигационная система (ИНС) — это излишне. Не стоит решать проблему за 300 долларов с помощью решения за 3000 долларов.
Ошибка №4: Забывание об окружающей среде
Технические характеристики, указанные в лабораторных условиях, не всегда соответствуют реальным условиям эксплуатации. Сильная вибрация, экстремальные температуры или ударные нагрузки могут быстро вывести из строя даже недорогие датчики.
Ошибка № 5: Недооценка трудозатрат на интеграцию
Получение необработанных данных с инерциального измерительного блока (IMU) не является простым и удобным процессом. Без подходящего программного обеспечения, фильтров или алгоритмов даже самый лучший датчик будет работать неэффективно.
Какую поддержку GuideNav предлагает при выборе IMU/INS?
В GuideNav мы не просто поставляем датчики — мы помогаем вам создать правильную систему . Мы предлагаем:
- Индивидуальные консультации по применению приложений
- Согласование характеристик IMU/INS
- Руководства по интеграции для БПЛА, беспилотных наземных транспортных средств и морских систем
- Комплекты для доступа к техническим характеристикам и оценки
- Оперативная инженерная поддержка
Независимо от того, создаете ли вы маломощный БПЛА или навигационную систему, работающую в условиях отсутствия GNSS, мы поможем вам выбрать между MEMS IMU, FOG IMU или полноценной инерциальной навигационной системой (INS) в зависимости от профиля вашей задачи.