
Как MEMS-гироскопы лежат в основе современной робототехники: от автоматизированных транспортных средств на складах до человекоподобных манипуляторов
MEMS-гироскопы составляют инерционную основу передовой робототехники, обеспечивая точное определение угловой скорости, отслеживание ориентации в реальном времени и надежную обратную связь по движению в компактных и энергоэффективных корпусах. Они незаменимы для обеспечения стабильной навигации и точных движений как для автоматизированных транспортных средств, так и для человекоподобных роботизированных манипуляторов.

MEMS или FOG для стабилизации лазерного дальномера на бронированных платформах? Вот что вам нужно знать
На основе реального опыта эксплуатации, гироскопы на основе волоконно-оптических гироскопов (FOG) превосходят MEMS-технологии по долговременной стабильности, виброустойчивости и термостойкости в приложениях с лазерными дальномерами, устанавливаемыми на транспортных средствах. MEMS-технологии по-прежнему пригодны для платформ с ограниченным пространством или ограниченным бюджетом, но требуют тщательной разработки системы компенсации.

Жизненный цикл гироскопа FOG: долговечность, калибровка и техническое обслуживание
В практических условиях для поддержания точности и стабильности волоконно-оптических гироскопов (ВОГ) требуется не только усовершенствованная конструкция датчика, но и откалиброванная системная структура, включающая термокомпенсацию, механическую изоляцию и техническое обслуживание с учетом жизненного цикла.
Почему инерциальные измерительные блоки на основе волоконно-оптических гироскопов (FOG) кардинально меняют ситуацию в системах подвеса?
Вот почему я полагаюсь на инерциальные измерительные блоки с волоконно-оптическим гироскопом — они обеспечивают непревзойденную точность и надежность, превращая шаткие и ненадежные подвесы в абсолютно устойчивые платформы независимо от условий.
Как решения на основе инерциальной навигационной системы (ИНС) могут преодолеть навигационные проблемы в сложных условиях?
Инерциальные навигационные системы (ИНС) работают независимо от внешних сигналов, измеряя ускорение и угловую скорость с помощью внутренних датчиков, что делает их незаменимыми в условиях, когда сигналы GNSS блокируются или ненадежны. Благодаря сложной системе объединения данных с датчиков, компенсации ошибок и коррекции на основе искусственного интеллекта, ИНС обеспечивают непрерывное и точное позиционирование в самых сложных условиях.
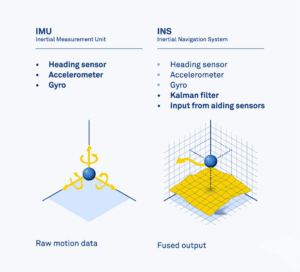
В чём разница между инерциальным измерительным блоком (IMU) и инерциальной навигационной системой (INS)?
Инерциальный измерительный блок (IMU) измеряет движение, а инерциальная навигационная система (INS) использует данные IMU для вычисления положения и ориентации во времени — IMU является датчиком, INS — системой.