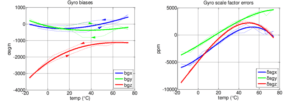
Термочувствительность волоконно-оптических гироскопов: стратегии проектирования для экстремальных условий эксплуатации
Термочувствительность волоконно-оптических гироскопов обусловлена расширением материала, изменением показателя преломления и особенностями работы оптического источника. Передовые стратегии — термокомпенсация, оптимизация намотки катушки и надежная калибровка — позволяют волоконно-оптическим гироскопам сохранять точность в экстремальных условиях.
Проектирование с учетом ARW: Практические инженерные решения для выбора инерциального измерительного блока (часть 2)
Случайное угловое блуждание (ARW) устанавливает предел точности инерциального измерительного блока (IMU). Его невозможно устранить программным обеспечением, его можно лишь уменьшить за счет выбора малошумных датчиков, стабильной тепловой конструкции, виброизоляции и эффективных стратегий объединения данных с нескольких датчиков.
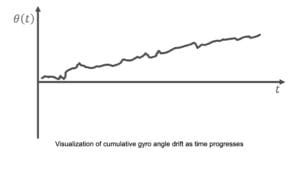
Понимание ARW: Скрытый предел точности IMU (Часть 1)
ARW — это не параметр, а тактовый сигнал. С момента запуска IMU он показывает, как быстро снижается доверие к ориентации. Чем ниже значение, тем дольше система сохраняет корректность.
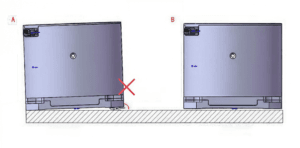
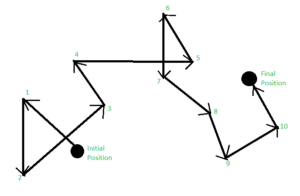
10 ошибок проектирования, которые допускают инженеры при интеграции инерциальных измерительных блоков (IMU)
Ошибки интеграции инерциального измерительного блока (IMU) могут существенно снизить надежность навигации. От смещения и вибрации до плохой калибровки и чрезмерной зависимости от объединения данных с датчиков — инженеры часто повторяют одни и те же ошибки. В этом руководстве мы рассмотрим 10 наиболее распространенных ошибок при интеграции IMU, объясним их последствия и предложим экспертные решения, которые вы можете применить в своих проектах.
Технология волоконно-оптических гироскопов в управлении ориентацией космических аппаратов: за пределами возможностей микроэлектромеханических систем
Волоконно-оптические гироскопы превосходят MEMS-технологии благодаря долговременной стабильности, радиационной стойкости и точности, сохраняющейся на протяжении многих лет. Они незаменимы для спутников, спутниковых группировок и космических зондов, где точность не может быть скомпрометирована.
Как технология объединения данных с нескольких датчиков меняет представление об инерциальных навигационных системах
Точность инерциальной навигации в конечном итоге ограничивается тем, насколько хорошо смоделированы и компенсированы ошибки датчиков. От дрейфа смещения до случайного блуждания, эффективное смягчение последствий требует сочетания аппаратной конструкции, процедур калибровки и алгоритмической коррекции в реальном времени.