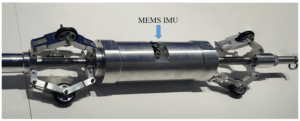
Применение MEMS-инерциальных измерительных блоков в роботах для инспекции трубопроводов
MEMS-инерциальные измерительные блоки (IMU) обеспечивают точную инерциальную навигацию для роботов, используемых для инспекции трубопроводов в условиях отсутствия GNSS-сигнала. Предоставляя стабильные данные об ориентации, скорости и положении, они гарантируют надежное картирование дефектов, плавное управление траекторией и непрерывную работу в ограниченных подземных или подводных трубопроводах.

Скрытые ловушки при использовании высокоточных MEMS-инерциальных измерительных блоков: что должен знать каждый интегратор
Высокоточные MEMS-инерциальные измерительные блоки (IMU) обеспечивают непревзойденную точность определения движения — но только при правильном использовании. В этой статье рассматриваются четыре критические ошибки, часто приводящие к потере точности, и способы их предотвращения при реальной интеграции.
Преимущества и недостатки инерциального измерительного блока Honeywell MEMS IMU HG1930
Honeywell HG1930 — это компактный инерциальный измерительный блок MEMS тактического класса, обеспечивающий надежную работу и прочную конструкцию для БПЛА, робототехники и оборонных систем. Он гарантирует стабильную точность в суровых условиях, но имеет более высокую стоимость и ограничения по экспорту.

Технология локализации на основе инерциальной навигационной системы (ИНС) лежит в основе автономного вождения
Автономные транспортные средства достигают точности на уровне сантиметров благодаря интеграции GNSS/INS, лидарному картографированию и визуальному восприятию, а высокоточные инерциальные измерительные блоки (IMU) составляют основу локализации в случае сбоя сигнала GPS.

Может ли инерциальный измерительный блок (IMU) самостоятельно выполнять одометрию?
Теоретически, инерциальный измерительный блок (IMU) может вычислять одометрию с помощью двойного интегрирования, но смещение и шум приводят к экспоненциальному дрейфу со временем. Поэтому реальные навигационные системы полагаются на объединение данных IMU с GNSS, LiDAR или камерами для поддержания точности и стабильности.
Когда следует проводить повторную калибровку или замену инерциального измерительного блока (IMU) FOG?
Для поддержания стабильности смещения необходимо калибровать инерциальный измерительный блок FOG каждые 12–24 месяца. Для обеспечения долгосрочной надежности навигации его следует заменять через 5–8 лет или при превышении допустимых значений дрейфа.