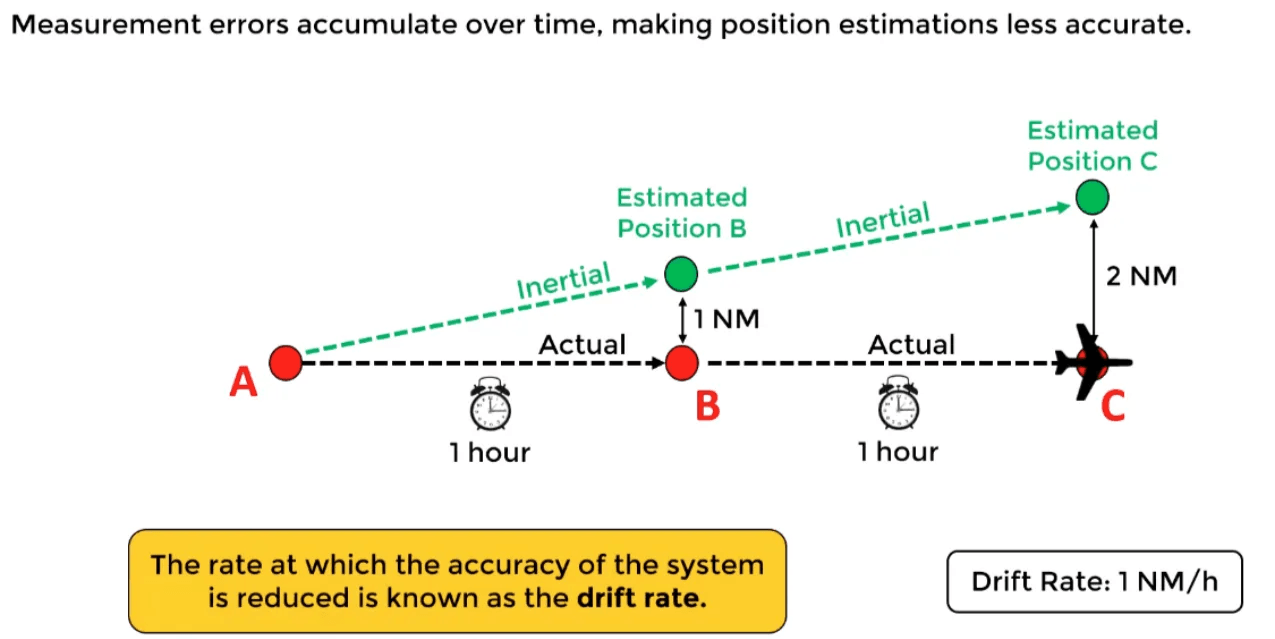
В контексте инерционных навигационных систем (INS) дрейф относится к постепенному накоплению ошибок с течением времени, что приводит к тому, что измерения системы (такие как положение, скорость или заголовок) постепенно становятся менее точными.
Вот как это работает:
- Нет внешней коррекции : в INS, датчики, такие как акселерометры и гироскопы, используются для расчета таких вещей, как положение и направление. Тем не менее, эти датчики не идеальны, и их небольшие ошибки могут со временем нарастать.
- Небольшие ошибки складываются : даже крошечная ошибка в измерении (например, крошечный сдвиг в положении или небольшая ошибка в вращении) может расти больше с течением времени, в результате чего система «уходит» от истинного значения.
Почему это важно:
Дрейф является общей проблемой в INS, потому что он приводит к увеличению ошибок, поскольку система продолжает работать. Без исправлений из внешних источников (например, GPS) дрейф может привести к тому, что система может дать неточные результаты через некоторое время, влияя на общую точность навигационной системы.