Инерциальные измерительные блоки (ИИБ) — бесшумные рабочие лошадки современной навигации. Они считывают каждое движение, вращение и ускорение, передавая важные данные беспилотным летательным аппаратам, кораблям, наземным транспортным средствам и аэрокосмическим системам. Однако, несмотря на свою важнейшую роль, ИИБ часто неправильно понимают или используют не по назначению. Небольшие ошибки на этапе интеграции могут перерасти в серьёзные эксплуатационные сбои, приводящие к дрейфу, нестабильности или даже к срыву миссии. По правде говоря, интеграция ИИБ — это не просто «подключи и работай». Она требует точности, дисциплины и предвидения.
Ошибки интеграции инерциального измерительного блока (ИИБ) могут снизить надежность навигации. Инженеры часто повторяют одни и те же ошибки: от несоосности и вибрации до плохой калибровки и чрезмерной зависимости от сочетания датчиков. В этом руководстве мы рассмотрим 10 наиболее распространённых ошибок при интеграции инерциального измерительного блока (ИИБ), объясним их последствия и предложим экспертные решения, которые вы можете применить в своих проектах.
Оглавление
Несоосность во время установки
Ошибка:
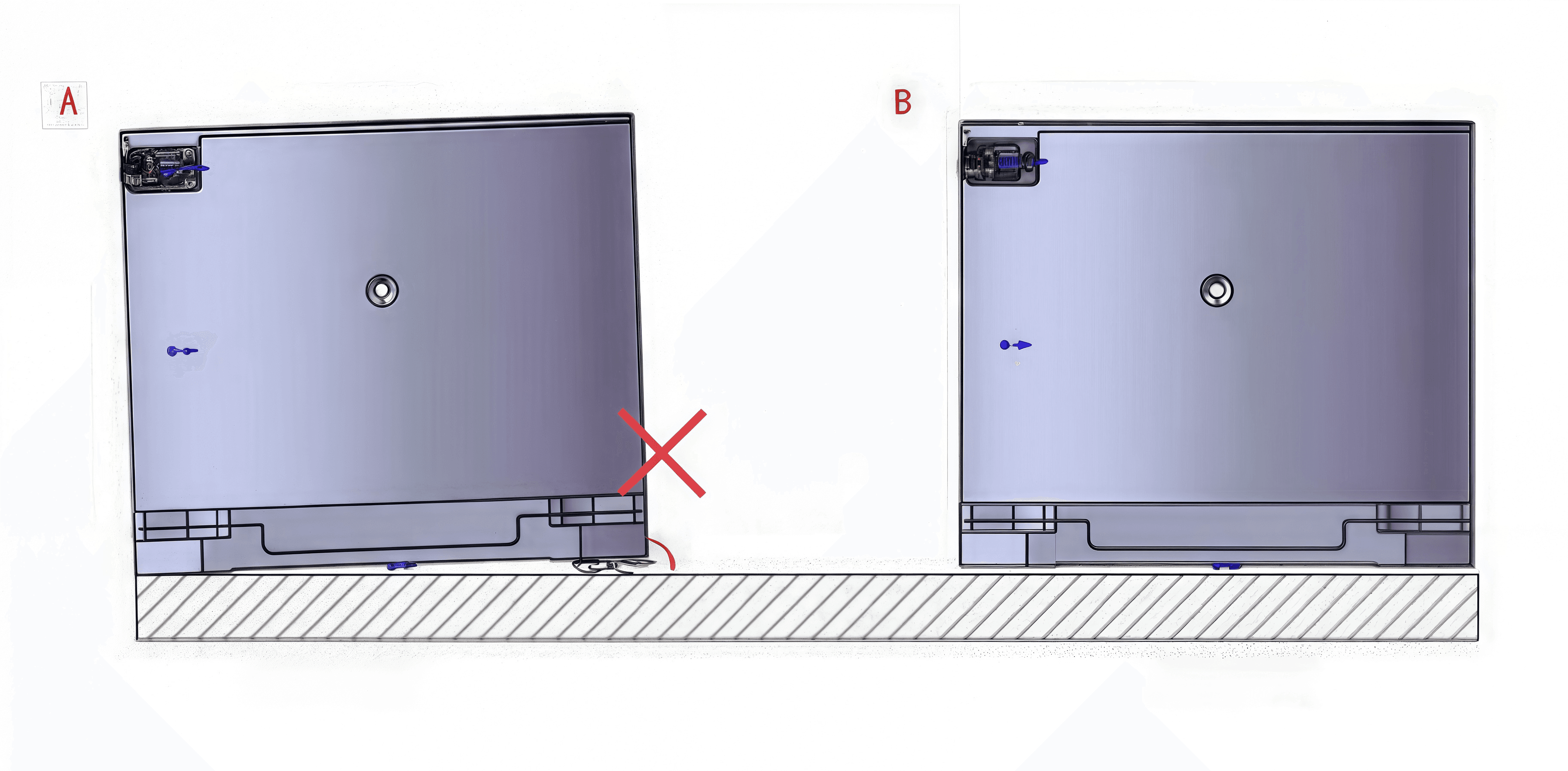
Инженеры иногда устанавливают инерциальные измерительные блоки «достаточно близко» к системе отсчёта платформы без точного выравнивания. Несколько градусов погрешности могут показаться незначительными, но в навигации эти смещения перерастают в серьёзные ошибки.
Влияние:
Несоосность осей приводит к систематической ошибке в оценке положения и скорости. В длительных полётах это приводит к увеличению дрейфа, особенно в условиях отсутствия GPS-сигнала, где единственным источником достоверной информации является инерциальный измерительный блок (ИИБ). БПЛА может постепенно отклоняться от курса, а роботизированный аппарат может неверно оценить своё направление.
Исправить:
Всегда определяйте опорные оси в САПР и используйте прецизионные инструменты, такие как лазерные центрирующие приспособления, при установке. После монтажа выполните калибровку центровки, чтобы измерить и компенсировать небольшие смещения.
💡Совет от профессионалов: никогда не доверяйте только механическим допускам — ваша подстраховка — это калибровка после интеграции.
Игнорирование виброизоляции
Ошибка:
Монтаж инерциального измерительного блока непосредственно на вибрирующие конструкции, такие как гребные винты, двигатели или шасси транспортного средства, при условии, что внутренние фильтры датчика будут компенсировать вибрацию.
Влияние:
Вибрация искажает сигналы акселерометра и создаёт ложные угловые скорости в гироскопах. Это приводит к зашумлённым выходным сигналам, нестабильной работе навигационных фильтров и заметному дрожанию в системах стабилизации. В самолётах или подвесах вибрация может снизить точность наведения.
Исправить:
Используйте виброизоляторы, настроенные на доминирующие частоты вашей платформы. Сочетайте аппаратное демпфирование с цифровой фильтрацией для снижения остаточных эффектов. Проверяйте производительность в условиях реальных нагрузок, а не только на лабораторных стендах.
💡Совет от профессионалов: всегда выполняйте анализ спектра вибрации вашей платформы перед окончательным проектированием изоляции.
Обзор терморегулирования
Ошибка:
Предполагая, что встроенная в IMU температурная компенсация решит все тепловые проблемы.
Влияние:
Реальные миссии предполагают быстрый нагрев от электроники, выхлопных газов двигателей или условий холода. Это приводит к нестабильности смещения, дрейфу масштабного коэффициента и снижению точности. В космосе циклические перепады температур могут иметь катастрофические последствия, если их не учитывать.
Исправить:
Проектирование терморегулирования на системном уровне. Возможны варианты использования теплоизоляционных кожухов, добавления теплораспределителей или даже управляемых нагревателей. Отслеживайте температуру на борту, чтобы отслеживать стабильность на протяжении всего цикла миссии.
💡Совет от профессионалов: тестируйте инерциальные измерительные приборы в условиях реалистичных температурных циклов, а не только при статических температурах.
Выбор неправильной оценки эффективности
Ошибка:
Выбор инерциального измерительного блока (ИИБ) исключительно на основе стоимости, размера или доступности, без учета продолжительности миссии или требований к точности.
Влияние:
Потребительские МЭМС-устройства могут выглядеть приемлемо в коротких тестах, но будут бесконтрольно дрейфовать в многочасовых условиях или при отсутствии сигнала GPS. Тактические МЭМС-устройства или инерциальные измерительные блоки FOG необходимы для серьёзных задач, но команды часто отказываются от них, чтобы сократить бюджет, что впоследствии приводит к дорогостоящим доработкам.
Исправить:
Адаптируйте характеристики инерциального измерительного блока (IMU) (нестабильность смещения, случайное блуждание, пропускная способность) к потребностям миссии. Используйте потребительские МЭМС для любительских дронов, тактические МЭМС для БПЛА и военной техники, а также волновые гироскопы (FOG) для морских и аэрокосмических операций.
| Тип ИДУ | Распространенное злоупотребление | Правильное применение |
|---|---|---|
| Потребительские МЭМС | Выбрано по стоимости | Короткие, некритические робототехнические |
| Тактические МЭМС | Незаслуженно упущенная выгода из-за цены | БПЛА, беспилотные летательные аппараты, оборонные платформы |
| ТУМАН ИДУ | Рассматривается как излишество | Морские, аэрокосмические и GPS-операции запрещены |
💡Совет от профессионалов: всегда оценивайте стоимость жизненного цикла в случае сбоя миссии по сравнению с первоначальной стоимостью датчика.
Плохая стратегия калибровки
Ошибка:
Полагаться исключительно на калибровку производителя, предполагая, что она действительна во всех случаях.
Влияние:
Механические допуски, ошибки монтажа и напряжения в разъёмах создают системные ошибки. Без вторичной калибровки эти ошибки ухудшают навигационные характеристики и результаты слияния данных.
Исправить:
Выполните калибровку на системном уровне, например, шестипозиционные тесты или определение характеристик по таблице скоростей. Обновите калибровочные таблицы в прошивке и периодически повторяйте их для обеспечения согласованности.
💡Совет от профессионалов: относитесь к калибровке как к повторяющемуся этапу технического обслуживания, а не как к разовой заводской процедуре.
Неадекватный интерфейс и обработка данных
Ошибка:
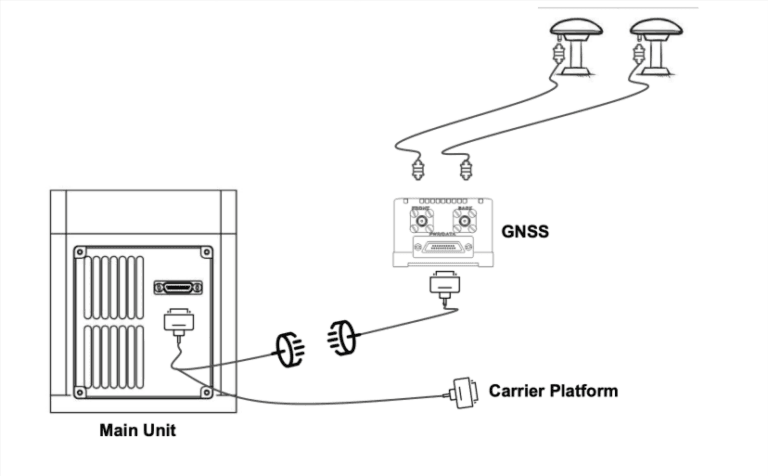
Неправильная настройка частоты дискретизации, игнорирование задержки или отсутствие синхронизации данных с другими датчиками.
Влияние:
Даже высококачественные инерциальные измерительные блоки (IMU) становятся ненадёжными, если их данные задерживаются или не согласованы. Слияние данных с ГНСС, лидаром или визуальным оборудованием не работает, если временные метки не совпадают.
Исправить:
Проектируйте надёжные конвейеры данных. Используйте PPS или аппаратные метки времени для синхронизации. Проверяйте сквозную задержку от датчика до процессора.
💡Совет от профессионалов: воспринимайте синхронизацию времени как часть качества датчика, а не как нечто второстепенное.
Игнорирование магнитных и электромагнитных помех
Ошибка:
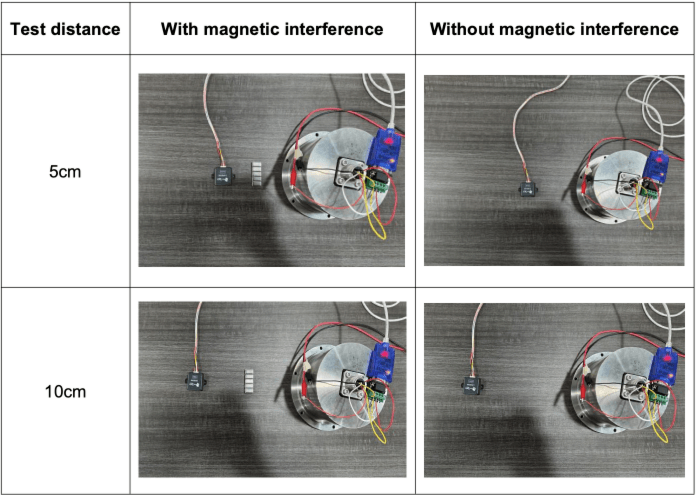
Установка инерциальных измерительных приборов вблизи двигателей, сильноточных кабелей или радиочастотных антенн.
Влияние:
Магнитные поля искажают сигналы акселерометра и гироскопа. Электромагнитные помехи проникают в электронику датчиков, вызывая ложные сигналы. Это особенно распространено в подвесах БПЛА, где компактные конструкции размещают датчики в опасной близости от двигателей.
Исправить:
Размещайте инерциальные измерительные блоки вдали от источников электромагнитных помех. Используйте экранированные корпуса, витую пару и заземление. Испытайте их под полной электрической нагрузкой для выявления скрытых помех.
💡Совет от профессионалов: чистая механическая конструкция может решать проблемы электромагнитных помех более эффективно, чем сложная фильтрация.
Не принимая во внимание долгосрочный дрейф
Ошибка:
Проверка инерциальных измерительных приборов с помощью кратковременных тестов, игнорирующих дрейф в течение нескольких часов или дней.
Влияние:
Нестабильность смещения накапливается, вызывая километры ошибок определения местоположения. Системы, использующие только инерциальные измерительные блоки (подводные лодки, космические аппараты, беспилотные летательные аппараты с заглушённым GPS), становятся непригодными к использованию.
Исправить:
Проводите испытания на выносливость, имитирующие длительность миссии. Выбирайте тактические или FOG-инерциальные измерительные блоки (IMU) для долгосрочной навигационной стабильности.
💡Совет от профессионалов: всегда оценивайте дрейф за период более 100 часов, а не только за 10 минут в лаборатории.
Чрезмерная зависимость от слияния датчиков
Ошибка:
Предполагая, что фильтры Калмана или слияние на основе искусственного интеллекта смогут исправить слабые инерциальные измерительные блоки.
Влияние:
Некачественные данные с датчиков просто загрязняют фильтр. Вместо повышения точности, слияние данных умножает ошибки — «мусор на входе, мусор на выходе».
Исправить:
Начните с надёжных данных инерциального измерительного блока (IMU). Слияние должно повышать производительность, а не восстанавливать неисправные датчики. Используйте избыточность везде, где это возможно, для проверки сигналов.
💡Совет от профессионалов: хороший IMU снижает сложность фильтра и значительно повышает его надежность.
Недооценка экологической квалификации
Ошибка:
Тестирование ИМУ проводится только в лабораторных условиях с предположением, что полевые результаты будут такими же.
Влияние:
Влажность, пыль, удары и экстремальные погодные условия превышают коммерческие характеристики. Без надлежащей квалификации инерциальные измерительные приборы не справляются с критически важными задачами.
Исправить:
Некоторые инерциальные измерительные блоки (IMU) прошли испытания по стандартам MIL-STD-810G, DO-160 или аналогичным. Запросите данные испытаний, а не только заявления из паспорта.
💡Совет от профессионалов: запрашивайте у поставщиков отчеты о квалификации — реальные данные лучше маркетинговых обещаний.
Заключение
Интеграция инерциальных измерительных блоков (ИИБ) — это одновременно искусство и наука. Самые передовые алгоритмы и системы управления не способны компенсировать ошибки монтажа, калибровки или неадекватные испытания. Избегая 10 ошибок, описанных здесь, инженеры могут раскрыть истинный потенциал инерциальных измерительных блоков (ИИБ) и создать системы, которые выживут и будут процветать в полевых условиях.
Компания GuideNav предлагает широкий ассортимент инерциальных измерительных блоков (ИИБ), состоящих из высокопроизводительных МЭМС-гироскопов, оптоволоконных и мини-гироскопов, а также МЭМС-акселерометров и кварцевых акселерометров , сертифицированных по строгим экологическим стандартам. Наша продукция предназначена для беспилотных летательных аппаратов, морских систем, военной техники и аэрокосмических платформ, где отказ недопустим. Если вам нужен готовый к выполнению задач ИИБ, наши специалисты готовы помочь вам в процессе интеграции.