В части 1 мы подробно разобрали, что такое ARW и почему он незаметно влияет на надёжность любой системы на базе инерциального измерительного блока (IMU). Но понимание принципов работы ARW ценно только в том случае, если вы можете проектировать с учётом этих принципов. Вторая часть посвящена практической стороне вопроса: как ARW влияет на навигацию реальных БПЛА, что может и не может делать программное обеспечение, и как я оцениваю датчики, когда отказ невозможен.
Случайный блуждание по углу (ARW) устанавливает предел точности инерциального измерительного блока . Его невозможно устранить программным способом, его можно лишь снизить за счёт выбора малошумящего датчика, стабильной тепловой конструкции, виброизоляции и эффективных стратегий объединения данных нескольких датчиков.
Вот почему в этой части я расскажу вам, как ARW проявляется в реальных операциях с БПЛА, почему программное обеспечение само по себе не может его устранить и какие практические конструктивные решения — выбор датчика, управление тепловым режимом, механическая изоляция и слияние — могут иметь решающее значение между успехом и провалом миссии.
Оглавление
Как ARW влияет на навигацию БПЛА?
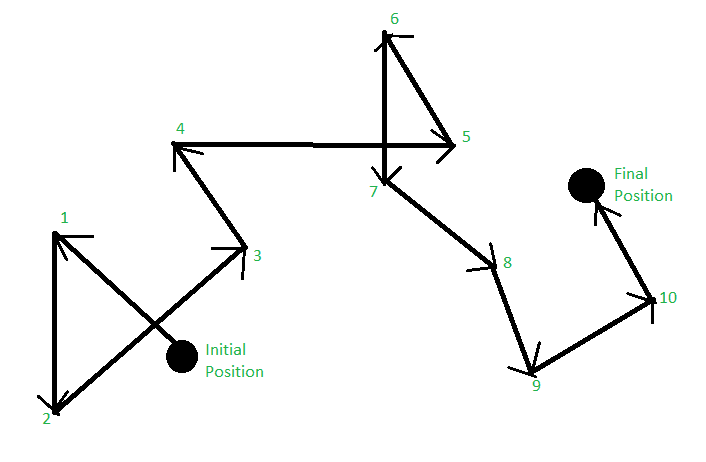
Представьте себе: вы летите на беспилотнике с фиксированным крылом через каньон, где нет сигнала ГНСС. Автопилот полностью полагается на ваш инерциальный измерительный блок (IMU), чтобы удерживать положение и сохранять траекторию полёта стабильной. Первые несколько минут всё выглядит стабильно. Но затем ориентация начинает смещаться — сначала медленно, затем быстрее. Беспилотник начинает вилять, стабилизация высоты нарушается, и вы теряете ориентир. Что произошло?
Это ARW в действии. Даже при отсутствии движения, температурных градиентов и вибрации интегрированный угловой шум незаметно подрывает вашу уверенность в тангаже, крене и курсе . Как только дрейф, вызванный ARW, превышает пороговые значения управления полётом, никакая настройка ПИД-регулятора или сглаживание не спасут платформу.
В своих проектах БПЛА я рассматриваю ARW как бюджет времени навигации . MEMS-гироскоп с точностью 0,2°/√ч может обеспечить 10–15 минут пригодной к использованию стабильности в зоне, где отсутствует приём сигналов ГНСС. Тактический MEMS с точностью 0,05°/√ч расширяет это окно. FOG даёт вам часы. Разница не только в производительности, но и в том, сможет ли вообще выполнить миссию .
Можно ли компенсировать ARW в программном обеспечении?
Эту ловушку я вижу слишком часто: команда сталкивается с дрейфом ориентации и предполагает, что его можно исправить в прошивке. Они добавляют больше фильтров, увеличивают коэффициент усиления Калмана или накладывают слои слияния датчиков, но дрейф никуда не исчезает . Потому что они борются не с ошибкой кода или неправильной конфигурацией слияния, а с физикой.
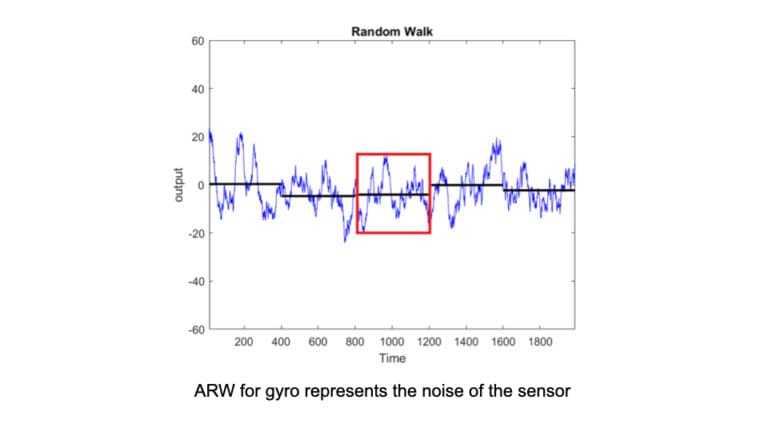
ARW — это не смещение и не смещение, а неустранимый шум. Он не стабилизируется со временем и не усредняется, как медленный тепловой дрейф. Он присутствует в нижней части каждого выходного сигнала гироскопа, внося неопределённость в интегрирование, начиная со второго.
Да, слияние данных помогает. Обновления данных ГНСС могут сбросить дрейф курса. Системы технического зрения или лидары могут зафиксировать положение. Но когда они выходят из строя, например, в туннеле или под действием помех, ваша система возвращается к исходному инерциальному измерительному блоку (IMU) , и в этот момент ARW становится источником обратного отсчёта. Если собственный шум датчика слишком высок, никакие программные хитрости вас не спасут.
Я говорю командам: вы можете отфильтровать эффекты ARW, но не можете полностью их стереть. Если вашей платформе необходимо летать, целиться или стабилизироваться без внешней коррекции дольше нескольких минут, выбирайте гироскоп с учётом этого — или проектируйте с учётом отказов.
Как инженеры минимизируют ARW при проектировании систем?
Устранить ARW невозможно, но можно разработать грамотный проект, учитывающий его . Каждая система, которую я создавал с надёжными инерционными характеристиками, начиналась с вопроса: «Насколько низким должен быть мой ARW и как лучше всего его достичь?» Вот мой подход:
- Выбор датчика — это самое главное. Если ваш бюджет на ARW ограничен, никакой алгоритм не спасёт от дешёвого МЭМС-гироскопа. Начните с самого простого устройства ARW, которое соответствует вашему объёму, мощности и бюджету. По моему опыту, одно только это решение определяет 80% качества системы в конечном итоге.
- Тепловая стабильность важнее, чем люди думают. Даже хорошо оснащенный гироскоп может испытывать рост шума при повышении температуры. Я видел, как значения ARW удваивались при плохой теплоизоляции. Стабильная тепловая масса или умеренное активное управление имеют решающее значение.
- Механическая изоляция снижает эффективный уровень шума. Вибрация вносит широкополосную энергию в сигнальный тракт датчика, часть которой интерпретируется как угловое движение. Мягкие крепления или настроенные изоляторы не снижают саму величину ARW, но они снижают то, что система воспринимает как ARW.
- Объединение данных датчиков расширяет ваш временной горизонт. ГНСС, магнитометры, барометры, визуальная одометрия — все они полезны, но только если их собственная неопределённость хорошо контролируется. Я рассматриваю объединение данных не как заплатку для плохих инерциальных измерительных блоков, а как умножитель для хороших.
Ключевой вывод? ARW определяет базовую модель. Всё остальное строится на её основе. Если ваш датчик изначально шумный, все последующие слои — фильтры, оценщики, слияние — унаследуют эту неопределённость.
На что следует обращать внимание при выборе приложения, чувствительного к ARW?
Выбирая инерциальный измерительный блок (ИИБ) для критически важной платформы, вы выбираете не просто характеристики, а временную шкалу отказа. ARW показывает, как долго ваша система сможет летать, управлять, целиться или стабилизироваться без внешней коррекции, прежде чем неопределенность возьмёт верх. Именно поэтому я рассматриваю ARW как определяющую переменную при выборе ИИБ.
Вот как я это представляю:
- Если окно отключения сигнала ГНСС составляет менее 5 минут и вам требуется лишь приблизительное ориентирование, может подойти промышленный МЭМС (0,1–0,5°/√ч). Просто учтите, что ваш фильтр будет постоянно бороться с дрейфом.
- Если ваша платформа должна сохранять стабильность в течение 10–20 минут , как в случае с БПЛА разведки и наблюдени или оптикой, устанавливаемой на транспортные средства, то тактические МЭМС с ARW в диапазоне 0,05°/√ч — это ваш минимальный выбор. Я никогда не использую здесь датчики потребительского уровня — без исключений.
- Если вам нужна почасовая надёжность — морская навигация, железнодорожные системы, бортовое вооружение — FOG больше не является обязательным. Вам потребуется ARW ниже 0,01°/√ч и, что ещё важнее, стабильность и устойчивость к внешним воздействиям, которые обеспечивает архитектура FOG.
В каждом обзоре дизайна, который я провожу, я задаюсь вопросом: «Что произойдёт, когда внешние ссылки исчезнут?» Если ответ — «Мы деградируем медленно и предсказуемо», это работа ARW. Если ответ — «Мы потеряемся меньше чем за 3 минуты», вы выбрали не тот инерциальный измерительный блок.
ARW как ориентир для выбора правильного ИМУ
Случайный блуждание по углу — это не просто число, скрытое в техническом описании, а эталон, определяющий, можно ли доверять инерциальному измерительному блоку (ИИБ) в критически важных приложениях. Инженеры в оборонной, аэрокосмической и морской отраслях знают, что низкий показатель случайного блуждания по углу — это разница между системами, которые дрейфуют в течение нескольких минут, и системами, которые остаются стабильными в течение часов или даже дней.
В GuideNav мы сосредоточены именно на этом стандарте. Наши инерциальные измерительные блоки (IMU) и навигационные системы на базе FOG разработаны с передовыми в отрасли характеристиками ARW, гарантируя точность в условиях отсутствия сигнала ГНСС, на БПЛА с большой продолжительностью полёта и платформах точной стабилизации. Нужна ли вам компактность и эффективность тактических MEMS или непревзойденная стабильность навигационных FOG, GuideNav предлагает решения, адаптированные к требованиям успешного выполнения миссии.
