Температурный дрейф инерциального измерительного блока (ИИБ) — стойкий источник погрешности гироскопа: при изменении температуры смещение гироскопа смещается, и статический блок кажется вращающимся. Поскольку этот дрейф накапливается со временем, даже небольшое смещение может привести к значительной ошибке ориентации или курса в беспилотных летательных аппаратах (БПЛА), автоматически управляемых транспортных средствах (AGV), роботах и стабилизированных платформах. Эффективное решение носит системный характер: уменьшить температурный дрейф инерциального измерительного блока (ИИБ) за счёт аппаратного обеспечения, определить его характеристики в зависимости от температуры во время калибровки и компенсировать его в режиме реального времени.
Температурный дрейф инерциального измерительного блока (IMU) является основной причиной снижения точности инерциальных систем. Оптимизация аппаратного обеспечения, полнодиапазонная температурная калибровка и онлайн-компенсация позволяют инженерам значительно уменьшить дрейф и обеспечить стабильность позиционирования.
Температурный дрейф инерциального измерительного блока (IMU) обусловлен физическими свойствами как MEMS-, так и FOG-устройств. При изменении температуры смещение датчика смещается, и если его не корректировать, этот дрейф накапливается, формируя долгосрочные ошибки ориентации. Управление температурным дрейфом инерциального измерительного блока (IMU) требует понимания влияния температуры на датчик, оценки его дрейфа посредством калибровки и применения компенсации в режиме реального времени. При правильной разработке аппаратного обеспечения, фильтрации и интеграции датчиков этот дрейф становится предсказуемым и полностью управляемым.
Оглавление
Понимание температурного дрейфа гироскопа
Прежде чем изучать способы снижения температурного дрейфа инерциального измерительного блока (IMU), важно понять, что представляет собой это явление. Температурный дрейф — это не случайный шум, а систематическое изменение смещения, вызванное изменением внутренней температуры датчика. Поскольку это смещение учитывается при оценке положения в пространстве, температурный дрейф инерциального измерительного блока (IMU) может накапливаться и приводить к значительным ошибкам курса или ориентации при длительной эксплуатации.
Выходной сигнал гироскопа:
Измеренная угловая скорость = истинная скорость + смещение + шум
Температурный дрейф IMU относится к изменению смещения при изменении температуры , и этот механизм отличается для гироскопов MEMS и FOG.
Мемс Гироскопы
Температурный дрейф инерциального измерительного блока (ИИБ) на основе МЭМС обусловлен изменениями модуля упругости, сдвигами резонансной частоты, изменениями демпфирования, дрейфом коэффициента усиления микросхемы ASIC и напряжением в корпусе. Эти эффекты часто приводят к значительному дрейфу при нагреве или сдвигу смещения при быстрых температурных изменениях.
Гироскопы FOG
Устройства FOG демонстрируют меньший температурный дрейф инерциального измерительного блока (IMU), но по-прежнему подвержены влиянию вариаций оптической фазы, сдвигов длины волны в источнике света, расширения волоконной катушки и термических напряжений. Их дрейф более плавный, но его всё равно необходимо моделировать и компенсировать.
Почему занос становится серьезной ошибкой поведения
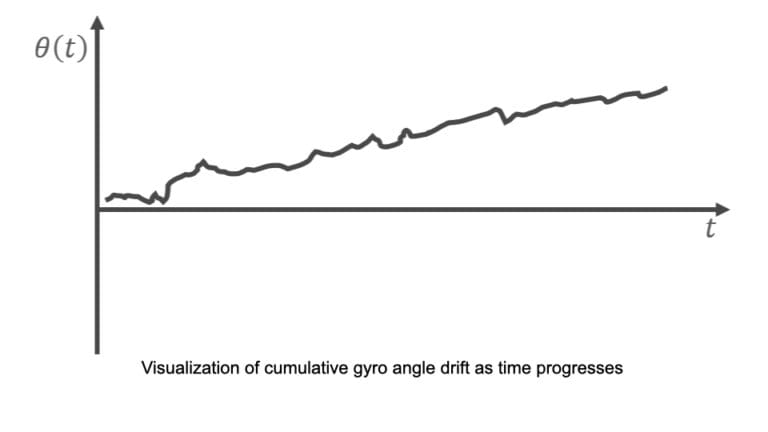
Хотя температурный дрейф может казаться незначительным в момент возникновения, его влияние становится серьёзным, как только он попадает в процесс оценки положения. Гироскопы измеряют угловую скорость, а положение определяется путём интегрирования этой скорости по времени. Любое нескорректированное смещение, каким бы малым оно ни было, продолжает накапливаться, приводя к растущим ошибкам крена, тангажа и, особенно, курса при длительной эксплуатации.
Смещение гироскопа интегрируется по времени:
Ошибка отношения ≈ ∫ смещение × время
Вот почему, казалось бы, незначительное отклонение, например, 0,01 °/с, может привести к ошибке ориентации в несколько градусов за считанные минуты. Чем продолжительнее миссия и чем меньше доступных внешних ориентиров, тем сильнее температурный дрейф влияет на общую точность навигации.
Три основных инженерных метода уменьшения температурного дрейфа
Для устранения температурного дрейфа гироскопа требуется многоуровневый инженерный подход, который устраняет проблему в её первоисточнике, моделирует её в контролируемых условиях и непрерывно корректирует в процессе эксплуатации. Обычно инженеры применяют три взаимодополняющих метода : оптимизацию оборудования, автономную температурную калибровку и онлайн-компенсацию в реальном времени.
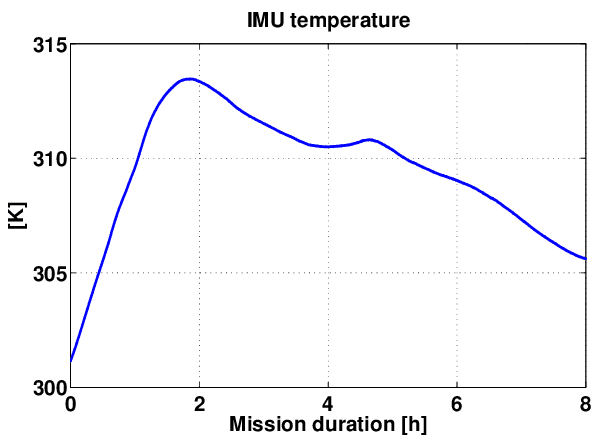
(1) Оптимизация оборудования: уменьшение дрейфа в источнике
Улучшения на аппаратном уровне существенно влияют на внутреннюю стабильность гироскопа. Эффективные стратегии включают выбор датчиков с низким температурным коэффициентом, использование термостойких конструкционных материалов, поддержание симметричной компоновки и управление внутренним тепловым потоком. Высококачественные инерциальные измерительные блоки (IMU) также могут быть оснащены нагревателем или модулем терморегулирования для поддержания стабильной рабочей температуры датчика, минимизируя его собственный дрейф.
(2) Автономная калибровка температуры: построение модели смещения и температуры
В процессе производства инерциальный измерительный блок (ИИБ) помещается в температурную камеру и проходит испытания во всем рабочем диапазоне (например, от −40°C до +85°C). Значения смещения регистрируются в каждой точке температуры, а затем подгоняются под модель компенсации — линейную, полиномиальную или кусочную. Коэффициенты модели сохраняются в прошивке и служат основой для точной коррекции в реальном времени.
(3) Онлайн-компенсация: исправление дрейфа в режиме реального времени
Благодаря модели смещения температуры инерциальный измерительный блок (IMU) компенсирует дрейф во время работы. Датчик температуры, расположенный рядом с сердечником гироскопа, обеспечивает показания температуры в режиме реального времени, а прошивка вычисляет ожидаемое смещение, используя модель, и это смещение вычитается из исходных измерений. Это компенсирует дрейф, вызванный прогревом, внутренним нагревом и изменениями температуры окружающей среды.

За пределами компенсации: фильтры и объединение датчиков для долговременной стабильности
Даже при использовании надежного оборудования, точной калибровки и компенсации в реальном времени небольшой остаточный дрейф всегда будет присутствовать. При длительной эксплуатации эти остаточные погрешности могут накапливаться, поэтому высокопроизводительные системы для обеспечения стабильности используют фильтрацию и объединение датчиков.
Методы фильтрации
Фильтры нижних частот или адаптивные фильтры стабилизируют оценку смещения и подавляют шумовые колебания температуры. Методы статического детектирования позволяют системе обновлять оценки смещения при каждом неподвижном инерциальном измерительном блоке, что дополнительно повышает долгосрочную стабильность.
Слияние датчика
Алгоритмы слияния используют внешние опорные данные для подавления накопленного дрейфа. К типичным источникам вспомогательных данных относятся акселерометры для коррекции тангажа/крена на основе гравитации, магнитометры или ГНСС для стабилизации курса, а также одометрия, видеонаблюдение или лидар для длительной навигации. Слияние на основе EKF/UKF привязывает систему к абсолютным опорным данным, предотвращая влияние температурного дрейфа на производительность.

Выбор правильного инерциального измерительного блока: MEMS или FOG
Выбор правильного инерциального измерительного блока (ИИБ) на ранней стадии — один из наиболее эффективных способов избежать ограничений, связанных с температурным дрейфом, в дальнейшем. ИИБ на основе МЭМС идеально подходят, когда важны компактность, низкое энергопотребление и экономичность, а также доступна внешняя поддержка. Они хорошо работают в условиях коротких и средних продолжительностей миссий и умеренных условий окружающей среды.
Инерциальные измерительные блоки FOG (IMU) являются лучшим выбором, когда ожидается долговременная стабильность, высокая точность определения курса или значительные колебания температуры. Они предпочтительны для миссий, где невозможно использовать ГНСС или другие внешние коррекции.
Простое руководство:
- Если ваша система может полагаться на слияние и нуждается в низком уровне SWaP → выбирайте MEMS.
- Если ваша система не может переносить накопленный дрейф → выбирайте FOG.

Создание стабильной системы с правильным GuideNav IMU
Температурный дрейф инерциального измерительного блока (IMU) становится управляемым при грамотном проектировании: оптимизации оборудования, калибровке температуры, компенсации в реальном времени, фильтрации и интеграции данных датчиков. Благодаря этим мерам беспилотные летательные аппараты (БПЛА), автоматически управляемые транспортные средства (AGV), роботы и оборонные системы могут поддерживать стабильную работу даже в сложных температурных условиях.
GuideNav предлагает инерциальные измерительные блоки (ИИБ), обладающие высокой термостабильностью, тщательно продуманными процессами калибровки и надежными алгоритмами компенсации. Выбор ИИБ GuideNav, соответствующего вашим условиям эксплуатации и требованиям к точности, гарантирует надежную теплотехническую основу для вашей системы, сводя к минимуму температурный дрейф ИИБ и повышая долгосрочную надежность.
