В своей работе по разработке навигационных систем я обнаружил, что истинная надежность достигается за счет независимости, а не зависимости от внешних сигналов. Именно поэтому инерциальные навигационные системы (ИНС) играют столь важную роль: они работают исключительно на основе внутренних измерений, обеспечивая стабильную и непрерывную навигацию в самых разных условиях, от автономных транспортных средств до аэрокосмических платформ.
Инерциальная навигационная система (ИНС) определяет положение, скорость и ориентацию, используя только внутренние датчики движения, что обеспечивает точную навигацию в широком спектре применений, включая автономные системы, подводные платформы и критически важные оборонные операции.
Перед выбором инерциальной навигационной системы (ИНС) для вашего приложения полезно четко понимать принципы ее работы и типы систем.
Оглавление

Что такое инерциальная навигационная система (ИНС)?
Инерциальная навигационная система (ИНС) — это автономная система, использующая внутренние датчики движения — обычно акселерометры и гироскопы — для непрерывного расчета положения, скорости и ориентации платформы в трехмерном пространстве. Поскольку она не зависит от каких-либо внешних источников данных, ИНС особенно ценна в средах, где требуется стабильная и непрерывная навигация, включая подводные, подземные и высокодинамичные оборонные приложения.
Каковы основные компоненты инерциальной навигационной системы (ИНС)?
По моему опыту проектирования инерциальных навигационных систем (ИНС), каждая система начинается с трех основных компонентов: гироскопов, акселерометров и навигационного процессора. Для повышения точности и стабильности мы часто интегрируем дополнительные датчики — такие как GNSS-приемники, магнитометры или барометрические высотомеры — для расширенного объединения данных с датчиков. Такая архитектура позволяет ИНС поддерживать надежное отслеживание движения в разнообразных и сложных условиях.

Гироскопы
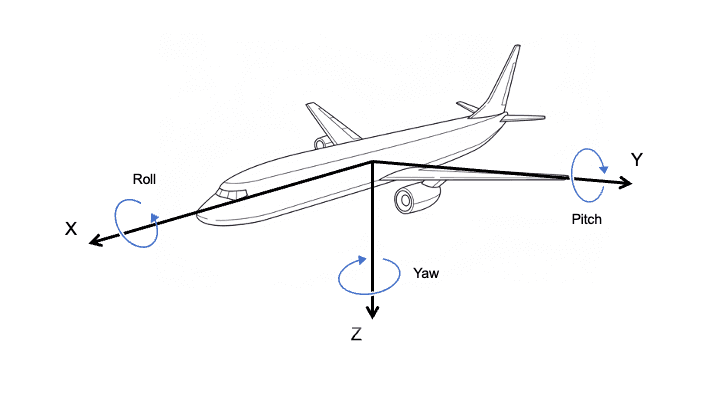
Гироскопы измеряют угловую скорость вдоль трех ортогональных осей (X, Y, Z), предоставляя важные данные для вычисления ориентации — крена, тангажа и рыскания. MEMS-гироскопы широко используются в компактных устройствах, в то время как волоконно-оптические гироскопы (FOG) и кольцевые лазерные гироскопы (RLG) обеспечивают более высокую точность и долговременную стабильность для тактических и аэрокосмических систем.
Акселерометры
Акселерометры измеряют линейное ускорение вдоль каждой оси. При интегрировании по времени эти значения дают изменения скорости и смещения. Высокопроизводительные акселерометры с низкой нестабильностью смещения и низким уровнем шума имеют решающее значение для поддержания точности позиционирования во времени.
Инерциальный навигационный процессор
Процессор служит вычислительным ядром инерциальной навигационной системы (ИНС). Он объединяет данные от датчиков движения, применяет алгоритмы компенсации и фильтрации, а затем в реальном времени выдает данные о положении, скорости и ориентации. Многие системы также поддерживают интеграцию внешних датчиков и диагностику в реальном времени в рамках этого блока.
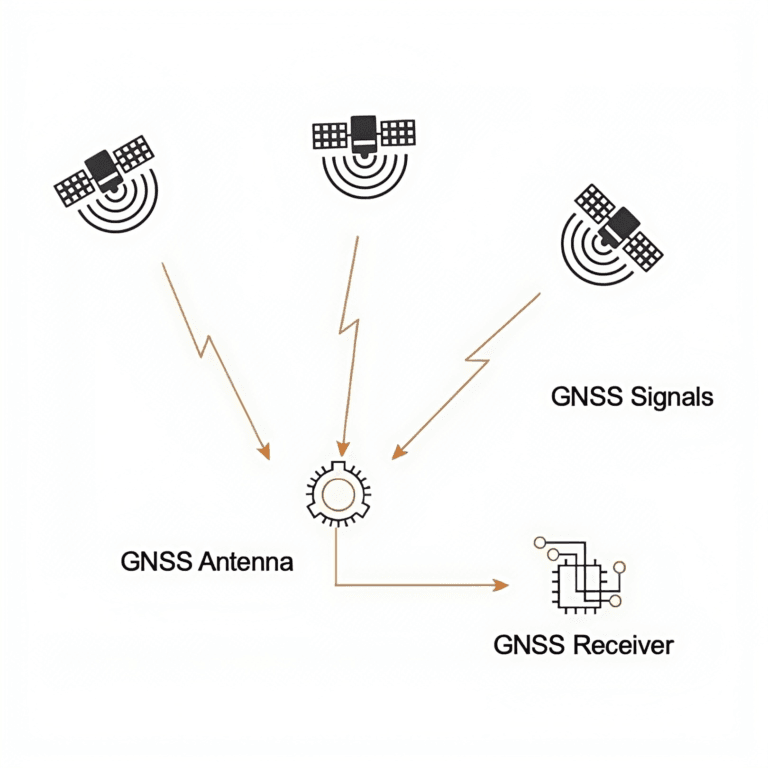
GNSS-приемники
Всё большее число инерциальных навигационных систем (ИНС) теперь интегрируют GNSS-приемники для повышения точности в долгосрочной перспективе и улучшения глобального позиционирования. Благодаря сочетанию инерциальных измерений со спутниковыми данными — как правило, с помощью расширенного фильтра Калмана — эти гибридные системы эффективно корректируют дрейф и обеспечивают надежную навигацию на автономных платформах, в аэрокосмических системах и геодезических приложениях.
Магнитометры
Магнитометры помогают определять курс, измеряя магнитное поле Земли. Хотя они менее точны, чем гироскопические решения, они обеспечивают полезную абсолютную точку отсчета — особенно в условиях низкой динамики или в помещениях.
Барометрические высотомеры
Эти датчики обеспечивают оценку высоты на основе атмосферного давления. Они широко используются в БПЛА, самолетах и наземных системах, требующих данных вертикальной привязки в условиях, когда данные о высоте, полученные с помощью GNSS, могут быть ненадежными.
Вместе эти компоненты образуют универсальную навигационную систему, способную передавать высокоскоростные данные о движении в реальном времени — независимо от того, работает ли она как чисто инерциальный блок или как часть тесно интегрированного решения GNSS/INS, разработанного для сложных, динамичных сред.
Какие существуют типы инерциальных навигационных систем (ИНС): MEMS, FOG и RLG?
Инерциальные навигационные системы можно условно разделить на категории в зависимости от типа используемой технологии гироскопа . Выбор технологии определяет ключевые характеристики производительности, такие как стабильность смещения, шум, дрейф и стоимость, поэтому крайне важно выбрать правильный тип для вашего применения.
1. MEMS-системы (микроэлектромеханические системы)
MEMS-инерциальные навигационные системы (INS) создаются с использованием микромеханических гироскопов и акселерометров на основе кремния. Благодаря достижениям в производстве полупроводников, эти системы теперь широко используются в компактных платформах, где размер, вес, энергопотребление и стоимость (SWaP-C) являются основными ограничениями.



2. ИНС на основе волоконно-оптического гироскопа (FOG INS)
Система FOG INS основана на эффекте Сагнака и использует свернутые волоконно-оптические кабели для измерения вращения. Она обеспечивает значительно более высокую стабильность, меньший дрейф и лучшую линейность масштабного коэффициента по сравнению с системами MEMS, что делает ее идеальной для тактической навигации.


3. ИНС на основе кольцевого лазерного гироскопа (RLG INS)
Инерциальная навигационная система RLG использует лазерную интерференцию в замкнутом контуре для определения угловой скорости с чрезвычайно высокой точностью. Эта архитектура обеспечивает точность стратегического уровня и обычно используется в системах, где критически важны абсолютные инерциальные характеристики.
| Тип INS | Преимущества | Ограничения | Типичные сценарии использования |
|---|---|---|---|
| MEMS INS |
|
| БПЛА, робототехника, носимые системы, барражирующие боеприпасы |
| ЗАТУМАНЫ |
|
| Аэрокосмические платформы, оборонная техника, морские системы |
| RLG INS |
|
| Баллистические ракеты, космические аппараты, высокотехнологичные самолеты |
Как работает инерциальная навигационная система (INS)?
При настройке инерциальной навигационной системы (ИНС) я всегда начинаю с определения ее начального положения, скорости и ориентации. После этого система полагается исключительно на инерциальные измерения для оценки каждого последующего состояния движения в реальном времени.
1. Измерение ускорения
Система использует трехосевые акселерометры для измерения линейного ускорения в трех направлениях. Эти значения интегрируются по времени для вычисления скорости, а затем интегрируются еще раз для вычисления изменений положения.
2. Измерение угловой скорости
Гироскопы измеряют угловую скорость вдоль осей X, Y и Z. Эти показания используются для обновления ориентации системы посредством интегрирования по кватернионам или углам Эйлера.
3. Принцип счисления пути
Инерциальная навигационная система (ИНС) работает по методу инерциальной навигации, то есть оценивает текущее состояние на основе предыдущего и данных с датчиков. Это позволяет ей осуществлять навигацию без внешних ориентиров, таких как GNSS.
4. Накопление ошибок и дрейф
Поскольку в систему интегрированы зашумленные данные с датчиков, со временем накапливаются небольшие смещения и ошибки (например, нестабильность смещения, ошибка масштабного коэффициента), что приводит к дрейфу как в положении, так и в ориентации.
5. Объединение данных с датчиков и вспомогательные входные данные
Для минимизации дрейфа инерциальная навигационная система (ИНС) часто комбинируется с внешними датчиками, такими как GNSS, доплеровские датчики скорости (DVL), барометры или магнитометры. Эти вспомогательные источники корректируют накопленные ошибки и повышают точность работы.
Эта архитектура позволяет инерциальной навигационной системе (ИНС) обеспечивать автономную навигацию в реальном времени в условиях, когда внешние сигналы ограничены, искажены или полностью недоступны, например, при высокой динамике или электромагнитных помехах.
Какие показатели эффективности определяют качество инерциальной навигационной системы (ИНС)?
При выборе инерциальной навигационной системы крайне важно понимать её основные параметры, чтобы гарантировать соответствие требованиям миссии. Наиболее важными являются следующие показатели:
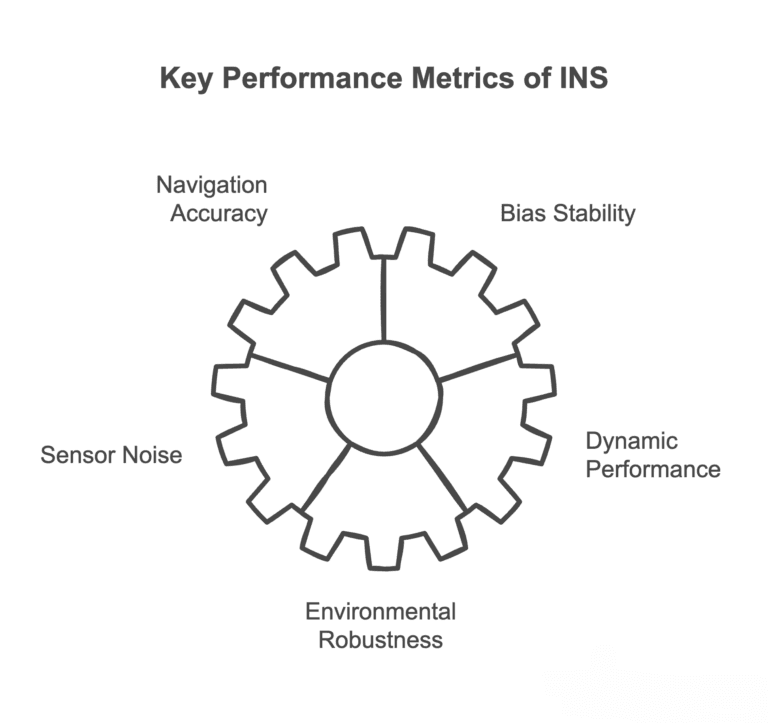
1. Точность навигации
Точность инерциальной навигационной системы (ИНС) включает в себя ошибки позиционирования, скорости и ориентации, которые накапливаются со временем. Высокая точность имеет решающее значение для работы в условиях отсутствия GNSS. Например, Guidenav GFS120A обеспечивает точность курса 0,01° (1σ) , точность крена/тангажа 0,005° (1σ) и позиционирование на уровне RTK <2 см + 1 ppm , при этом ошибка скорости составляет всего 0,02 м/с .
2. Стабильность смещения
Стабильность смещения отражает долговременный дрейф гироскопов и акселерометров, который напрямую влияет на продолжительность навигации. Guidenav GFS120A обладает стабильностью смещения гироскопа 0,003°/ч и стабильностью смещения акселерометра менее 20 мкг , что делает его подходящим для высокоточных и длительных автономных приложений.
3. Шум датчика (случайное блуждание)
Случайное блуждание позволяет количественно оценить кратковременный шум датчика. Более низкие значения ARW и VRW указывают на более чистые и стабильные данные во время движения.
4. Динамические характеристики
Скорость обновления, задержка и пропускная способность определяют, насколько быстро инерциальная навигационная система реагирует на движение. Высокая динамическая производительность имеет решающее значение для БПЛА, робототехники и ракет.
5. Экологическая устойчивость
ИНС должна выдерживать вибрацию, удары и экстремальные температуры. Соответствие стандартам MIL-STD или DO-160 гарантирует надежность в суровых условиях.
Понимание и сравнение этих показателей позволяет интеграторам выбрать подходящую инерциальную навигационную систему (ИНС) для своей платформы, обеспечивая баланс между стоимостью, точностью и требованиями к условиям окружающей среды.
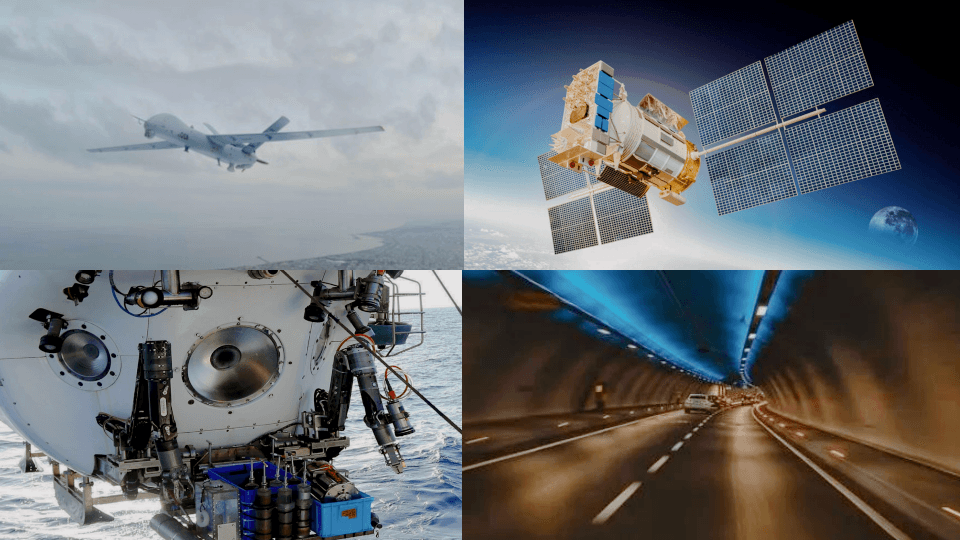
Каковы типичные области применения инерциальной навигационной системы (ИНС) в различных отраслях промышленности?
Инерциальные навигационные системы (ИНС) широко используются в аэрокосмической, морской, оборонной, беспилотной технике, промышленной автоматизации и подземной промышленности, где непрерывная, независимая от сигнала навигация имеет решающее значение. В аэрокосмической отрасли они обеспечивают точное наведение самолетов и ракет; в морских приложениях они поддерживают подводные лодки и автономные подводные аппараты (АППА), где GNSS недоступна. Системы обороны полагаются на ИНС для целеуказания, управления огнем и навигации в условиях отсутствия GPS. Беспилотные платформы, такие как БПЛА, наземные и подводные беспилотные аппараты, используют ИНС для позиционирования в реальном времени и объединения данных с датчиков. В промышленной робототехнике ИНС обеспечивают точное управление движением автоматизированных транспортных средств (AGV) и кранов. В горнодобывающей промышленности и тоннелестроении ИНС обеспечивают надежное подземное позиционирование для тяжелой техники и буровых систем.
Почему GuideNav занимает лидирующие позиции в индустрии инерциальной навигации?
Обладая более чем 15-летним опытом, компания GuideNav поставляет высокоэффективные инерциальные навигационные решения, которым доверяют интеграторы оборонной, аэрокосмической и автономной отраслей по всему миру.
Разнообразные линейки продукции
От компактных MEMS-инерциальных навигационных систем для БПЛА до высокоточных FOG-инерциальных навигационных систем для морской и аэрокосмической отраслей, GuideNav охватывает полный спектр задач.
Оптимизировано для SWaP-C (SWaP-C)
Все системы разработаны с учетом компактности, веса, энергопотребления и экономической эффективности — идеально подходят для мобильных, встраиваемых и тактических платформ.
Готовность к интеграции гибридных систем
Наши инерциальные навигационные системы (ИНС) обеспечивают бесшовную интеграцию с GNSS, доплеровскими измерительными приборами (DVL) и другими вспомогательными датчиками через стандартные интерфейсы (UART, CAN, Ethernet).
Прочный и проверенный в полевых условиях
Разработанные в соответствии со стандартом MIL-STD-810H, устройства GuideNav устойчивы к ударам, вибрации и надежно работают в суровых условиях.
GuideNav — предпочтительный партнер для интеграторов, стремящихся к созданию передовых инерциальных навигационных систем (ИНС), сочетающих высокую точность, эксплуатационную надежность и полное соответствие экспортным требованиям для сложных задач в оборонной, аэрокосмической и автономной отраслях.