Высокоточные MEMS-инерциальные измерительные блоки (IMU) часто демонстрируют низкую производительность после интеграции. Дрейф, смещение и факторы окружающей среды незаметно снижают точность — до тех пор, пока не возникают отказы в полевых условиях. Для сохранения истинной точности следует придерживаться четырех правил: жесткая юстировка, контролируемая среда, периодическая калибровка и дисциплинированная работа.
Высокоточные MEMS-инерциальные измерительные блоки (IMU) обеспечивают непревзойденную точность определения движения — но только при правильном использовании. В этой статье рассматриваются четыре критические ошибки, часто приводящие к потере точности, и способы их предотвращения при реальной интеграции.
Высокоточные MEMS-инерциальные измерительные блоки (IMU) являются основой современной навигации — от дронов до беспилотных автомобилей. Однако даже высококачественные датчики не смогут работать должным образом при неправильном обращении. В этом руководстве раскрываются скрытые ловушки, которые незаметно снижают точность, и показано, как интеграторы могут их предотвратить.
Оглавление
Установка: отправная точка каждого высокоточного MEMS-инерциального измерительного блока (IMU)
Устанавливайте его жестко, а не мягко
MEMS IMU регистрирует только собственное движение, поэтому он должен двигаться точно так же, как и платформа. Для получения надежных результатов закрепите устройство непосредственно на жесткой конструкции с помощью металлических или углеродных кронштейнов. Избегайте резиновых прокладок или других мягких материалов, которые изгибаются или поглощают вибрацию — они нарушают механическую связь и искажают данные датчика.
Если виброизоляция неизбежна, следует тщательно продумать ее конструкцию и убедиться, что характеристики демпфирования не искажают частотную характеристику или фазовую характеристику выходного сигнала инерциального измерительного блока (IMU).
Идеально выровняйте оси
Даже небольшое угловое смещение может привести к значительным ошибкам позиционирования. При смещении высокоточного MEMS-инерциального измерительного блока всего на один градус, дрейф может достигать километров после длительной эксплуатации. Всегда выравнивайте оси инерциального измерительного блока по системе координат транспортного средства или выполняйте точную калибровку после установки.
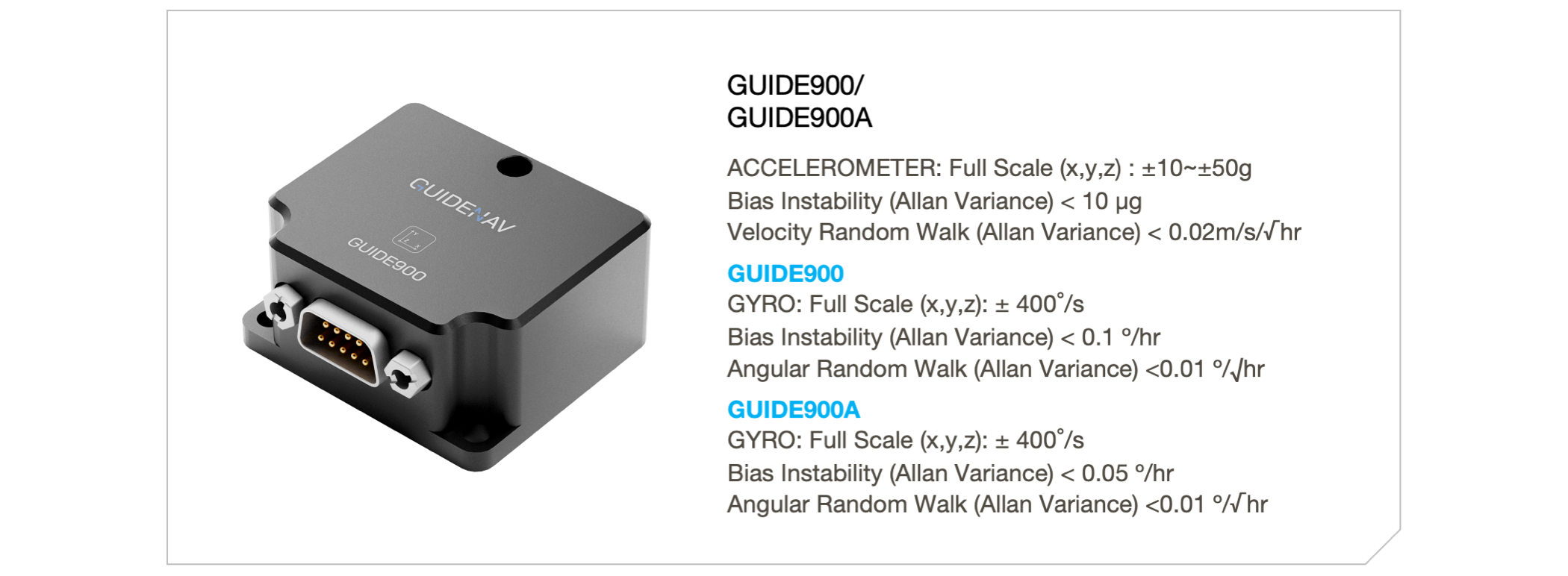
Измерительный блок MEMS IMU GuideNav GUIDE900 откалиброван на заводе с коэффициентом нелинейности менее 100 ppm и межосевой связью ниже 200 ppm — однако неправильная установка и выравнивание могут быстро свести на нет эту точность.
Избегайте зон вибрации и напряжения
Постоянная вибрация или структурные напряжения постепенно изменяют внутренние характеристики MEMS-инерциального измерительного блока (IMU). Избегайте установки датчика вблизи двигателей, редукторов или сварных соединений. Со временем эти механические воздействия могут привести к дрейфу смещения и снижению долговременной стабильности.
Контроль окружающей среды: скрытый враг точности инерциального измерительного блока (IMU)
Температурная стабильность – это всё
Наиболее распространенной причиной дрейфа в высокоточных MEMS-инерциальных измерительных блоках является изменение температуры. Каждый датчик имеет определенный температурный диапазон работы — обычно от −40 °C до +85 °C. Внезапные колебания могут сместить нулевое смещение или масштабный коэффициент.
При необходимости обеспечьте стабильную работу MEMS IMU с помощью изоляции, контролируемого воздушного потока или нагревательных элементов. Все MEMS IMU GuideNav полностью компенсируют изменение температуры во всем диапазоне, обеспечивая стабильную точность в экстремальных условиях.
Влажность может незаметно ухудшить точность
Влага — ещё одна невидимая угроза. Когда влажность превышает 85 % относительной влажности, она может проникать внутрь корпуса, вызывать коррозию цепей и изменять работу датчика. Даже кратковременная конденсация может вызвать временные скачки смещения. При работе в морском или тропическом климате всегда защищайте высокоточный инерциальный измерительный блок (IMU) внутри герметичного корпуса осушителями.
Избегайте электромагнитных помех (ЭМП)
Сильнодействующие линии и импульсные преобразователи питания могут вносить помехи в аналоговый входной каскад MEMS-инерциального измерительного блока (IMU). Для предотвращения помех необходимо отделять силовые провода от сигнальных линий, обеспечивать надлежащее заземление и использовать экранированные кабели. Чистая электромагнитная среда так же важна, как и механическая стабильность, для поддержания долговременной точности.
Калибровка: жизненно важный параметр для высокоточного MEMS-инерциального измерительного блока
Заводская калибровка не вечна .
Каждый MEMS-инерциальный измерительный блок (IMU) покидает завод с калибровкой по смещению, масштабному коэффициенту и ортогональности, но эти параметры со временем изменяются из-за температурных циклов, вибрации и механических нагрузок. Для поддержания высокой точности IMU в соответствии со спецификациями рекомендуется проводить периодическую калибровку каждые 6–12 месяцев, а для критически важных систем — чаще.
Выберите правильный подход к калибровке
Если демонтаж инерциального измерительного блока (IMU) нецелесообразен, выполните бортовую или калибровку в реальном времени, используя статические процедуры выравнивания или оценку с помощью GNSS.
Однако для полного восстановления точности требуется лабораторная калибровка на динамометрическом стенде или в термокамере. Этот метод корректирует все шесть осей и компенсирует температурный дрейф, обеспечивая сохранение тактических характеристик MEMS IMU в различных условиях.
Всегда проверяйте результат
Калибровка считается завершенной только после ее проверки. Сравните данные после калибровки с эталонными профилями движения или данными датчиков, определяющих параметры на местности, чтобы подтвердить стабильность и точность.
Пренебрежение проверкой может привести к скрытым ошибкам, которые незаметно ухудшают производительность, сводя на нет цель повторной калибровки.
Эксплуатация и обращение: точность кроется в деталях
Прежде чем доверять данным, проведите предварительную оценку
Для достижения термической и электронной стабильности MEMS-инерциальному измерительному блоку (IMU) после включения питания требуется время. Большинству высокоточных IMU требуется период прогрева от 1 до 30 минут, в зависимости от модели и условий эксплуатации. Слишком ранний сбор данных может привести к временному смещению, в несколько раз превышающему номинальное значение.
Избегайте частых перезагрузок питания
Многократное включение и выключение инерциального измерительного блока (IMU) сбрасывает его внутренние фильтры и вызывает кратковременные изменения смещения. Для обеспечения стабильной работы и бесперебойной передачи данных необходимо постоянно поддерживать питание MEMS IMU во время сбора важных данных.
Обращаться с осторожностью — всегда
Несмотря на прочную конструкцию, высокоточные MEMS-инерциальные измерительные блоки содержат хрупкие микроструктуры. Падения, удары или неправильное обращение могут привести к незначительному, но необратимому снижению точности. Во время транспортировки используйте мягкие контейнеры и надежно закрепляйте разъемы. Регулярно проверяйте кабели, крепления и корпуса — механические нагрузки или ослабленная проводка часто предшествуют дрейфу датчика.

Экспертное мнение GuideNav
В GuideNav мы убедились, как простая ошибка — неправильная установка, пропущенная калибровка или температурный дрейф — может превратить высокоточный MEMS IMU в ненадежный датчик. В реальных условиях интеграция — это не только технические характеристики; это дисциплина в установке, калибровке и долгосрочном обслуживании.
Именно поэтому инерциальные измерительные блоки GuideNav MEMS разработаны для профессиональных интеграторов, которым необходима стабильная, проверенная в полевых условиях точность. Каждый блок имеет полную температурную компенсацию, ортогональную калибровку и защищен прочным алюминиевым корпусом, рассчитанным на работу в самых жестких условиях вибрации и окружающей среды.
Независимо от того, связан ли ваш проект с беспилотными летательными аппаратами, автономными транспортными средствами или промышленной робототехникой, применение правильных методов позволит вашему MEMS-инерциальному измерительному блоку работать именно так, как задумано — стабильно, надежно и быть готовым к выполнению критически важных задач.
