Подземные и подводные трубопроводы трудно инспекциировать, поскольку сигналы GPS, свет и магнитные ориентиры внутри них исчезают. Традиционные датчики, такие как камеры и энкодеры, теряют точность на скользких или изогнутых поверхностях, что делает локализацию дефектов ненадежной. В таких условиях, когда отсутствует GNSS, инерциальные измерительные блоки (IMU) на -технологии обеспечивают автономное навигационное решение. Компактные, маломощные и виброустойчивые, эти инерциальные датчики на основе MEMS позволяют роботам для инспекции трубопроводов поддерживать стабильную ориентацию, точно измерять движение и точно картировать дефекты — даже на глубине сотен метров под поверхностью.
MEMS-инерциальные измерительные блоки (IMU) обеспечивают точную инерциальную навигацию для роботов, используемых для инспекции трубопроводов в условиях отсутствия GNSS-сигнала. Предоставляя стабильные данные об ориентации, скорости и положении, они гарантируют надежное картирование дефектов, плавное управление траекторией и непрерывную работу в ограниченных подземных или подводных трубопроводах.
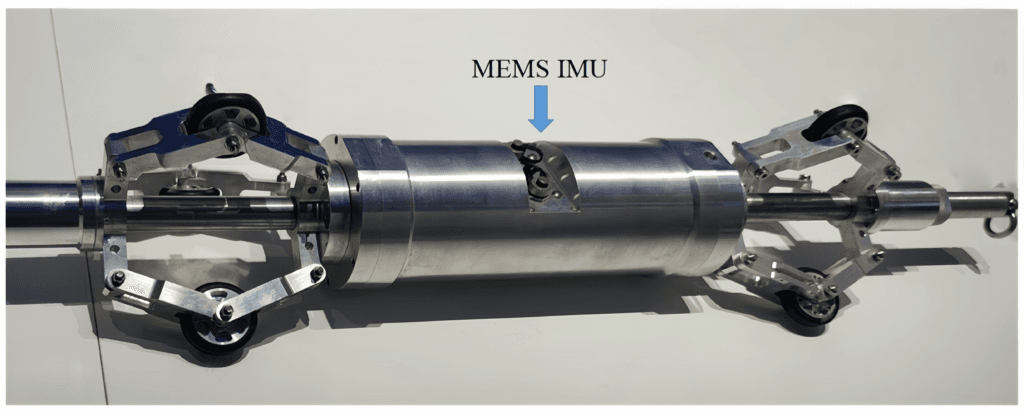
Внутри трубопровода, где отсутствуют GNSS и визуальные ориентиры, навигация полностью зависит от MEMS IMU. Эти компактные инерциальные датчики регистрируют угловую скорость и ускорение для построения непрерывного профиля движения. Для робота, используемого для инспекции трубопроводов, точная инерциальная навигация означает знание его точного положения, ориентации и скорости — основы для надежного обнаружения и картирования дефектов.
Оглавление
Проблемы навигации в системах, где отсутствует поддержка GNSS
Для робота, предназначенного для инспекции трубопроводов , навигация является самой сложной задачей. Глубоко внутри металлических трубопроводов сигналы GNSS полностью блокируются , и даже магнитные датчики теряют надежность. Единственный способ обеспечить точное отслеживание движения — это инерциальная навигация, основанная на MEMS IMU . Непрерывно измеряя угловую скорость и линейное ускорение, IMU помогает роботу вычислять свою ориентацию, скорость и положение в реальном времени. Любая нестабильность смещения или дрейф интегрирования могут привести к серьезным ошибкам картирования — именно поэтому высокопроизводительные MEMS IMU GuideNav необходимы для точной подземной инспекции в условиях отсутствия GNSS .

Почему технология MEMS IMU идеально подходит для роботов, используемых для инспекции трубопроводов
Компактный. Прочный. Точный.
Внутри узкого стального трубопровода важен каждый миллиметр и каждый ватт.
Именно здесь MEMS IMU оказывается незаменимым.
- Компактный и легкий: роботы для инспекции трубопроводов малого диаметра в условиях ограниченного пространства.
- Низкое энергопотребление и эффективность: обеспечивает возможность выполнения длительных миссий без перегрузки энергосистемы.
- Виброустойчивость: обеспечивает стабильную инерциальную навигацию даже при вибрации 20 g RMS.
- Термостойкость: Надежно работает в диапазоне температур от –40 °C до +85 °C.
В отличие от громоздких волоконно-оптических гироскопических датчиков (FOG), инерциальная система на основе MEMS-технологии обеспечивает высокоточные данные о движении в миниатюрном форм-факторе — идеально подходящем для подземных условий, где отсутствует GNSS-связь .
От необработанных данных о движении до точного определения местоположения
В трубопроводе, где отсутствует GNSS-сигнал , каждое движение робота для инспекции трубопровода должно измеряться самостоятельно.
MEMS -инерциальный измерительный блок преобразует необработанные сигналы движения в значимые инерциальной навигации с помощью точного вычислительного процесса:
Шаг 1. Определение движения
Высококачественные MEMS-гироскопы измеряют угловую скорость, а MEMS-акселерометры определяют линейное ускорение.
Вместе они образуют основу для внутренней системы отсчета движения робота.
Шаг 2. Интеграция и вычисления
Встроенный процессор интегрирует данные инерциального измерительного блока (IMU) для оценки ориентации , скорости и положения в реальном времени.
Это и есть суть навигации по инерциальной системе отсчета , которая позволяет осуществлять непрерывное отслеживание даже без GPS.
Шаг 3. Локализация дефекта
Когда камеры или ультразвуковые зонды обнаруживают коррозию или трещины, блок GuideNav MEMS IMU предоставляет точные пространственные координаты.
Это позволяет инженерам точно определить местоположение каждого дефекта вдоль трубопровода.
Шаг 4. Создание карты.
Объединенный поток данных формирует карту инспекции трубопровода , сопоставляя отчеты о структурной целостности с физическими координатами — процесс, ставший возможным только благодаря инерциальной навигации на базе MEMS-инерциальных измерительных блоков.
Вкратце: от определения ускорения до точного картографирования, каждый этап процесса зависит от точности и стабильности смещения MEMS-инерциального измерительного блока GuideNav, работающего в сложных подземных или подводных условиях.

Роль устойчивости смещения в подземной навигации
Почему важна стабильность предвзятости
В роботе для инспекции трубопроводов каждый градус отклонения имеет значение.
Внутри протяженных трубопроводов, где отсутствует GNSS-сигнал , даже небольшое смещение инерциального измерительного блока может накапливаться и приводить к значительным ошибкам позиционирования после нескольких часов движения.
Например, смещение гироскопа на 1°/ч может привести к тому, что рассчитанное положение робота отклонится на несколько метров — этого достаточно, чтобы неправильно обозначить место коррозии.
Что вызывает дрейф смещения?
Нестабильность смещения в MEMS-инерциальном измерительном блоке обычно возникает из-за:
- Колебания температуры внутри трубопровода
- Длительная вибрация и механическое напряжение
- Производственные отклонения и старение элементов MEMS
Эти факторы постепенно искажают инерциальной навигации , вызывая неточные карты и ложные данные о местоположении.
Как промышленные MEMS-инерциальные измерительные блоки решают эту проблему
В высококачественных промышленных датчиках, таких как MEMS IMU GuideNav, используются:
- Цифровая компенсация с обратной связью
- Многотемпературная калибровка
- Оценка смещения в реальном времени с помощью фильтра Калмана
Это обеспечивает превосходную стабильность смещения, позволяя роботу для инспекции трубопроводов перемещаться на несколько километров с минимальным дрейфом.
Такие характеристики определяют разницу между датчиками потребительского класса и промышленными инерциальными навигационными системами MEMS, используемыми для точной инспекции инфраструктуры.
Борьба с вибрацией — механическая и алгоритмическая компенсация
Внутри действующих трубопроводов насосы и турбулентность потока создают постоянные вибрации, которые нарушают инерциальную навигацию .
Низкокачественные MEMS-инерциальные измерительные блоки часто ошибочно считывают эти колебания как реальное движение, что приводит к дрейфу и нестабильной ориентации роботов для инспекции трубопроводов .
В инерциальных измерительных блоках GuideNav MEMS эта проблема решается за счет микродемпфированной механической конструкции, цифровой фильтрации и адаптивных алгоритмов Калмана, которые в реальном времени устраняют погрешности, вызванные вибрацией.
Стабильность температуры и термокалибровка
Трубопроводы часто проходят через различные среды, от замерзшей почвы до горячих зон компрессоров, где изменения температуры могут искажать инерциальных измерительных блоков MEMS .
Нестабильная температура влияет на смещение и масштабный коэффициент, что приводит к дрейфу навигации в роботах для инспекции трубопроводов .
Для решения этой проблемы в инерциальных измерительных блоках GuideNav MEMS используется многоточечная калибровка температуры и цифровые модели термокомпенсации , обеспечивающие стабильность смещения в диапазоне от –40 °C до +85 °C.
Это гарантирует стабильную инерциальной навигации в длительных миссиях, даже при существенных изменениях окружающей среды — критически важное преимущество для подземных или подводных операций, где отсутствует GNSS-сигнал .
Объединение данных с различных датчиков — ключ к долгосрочной точности
Даже в самых стабильных MEMS-инерциальных измерительных блоках со временем накапливается дрейф.
Для обеспечения точности работы роботов для инспекции трубопроводов исходные инерциальной навигации с данными энкодеров колес, датчиков давления или ультразвуковых дальномеров.
Используя усовершенствованную фильтрацию Калмана или объединение ошибок и состояний , MEMS-инерциальные измерительные блоки GuideNav объединяют эти сигналы для непрерывной оценки и коррекции смещения.
Этот многосенсорный подход минимизирует накопительную ошибку, обеспечивая точную траекторию и локализацию дефектов на больших расстояниях.
В условиях отсутствия GNSS-связи именно такое интеллектуальное объединение данных с датчиков преобразует необработанные инерциальные данные в надежную навигационную систему, работающую в реальных условиях.
Неконтролируемый дрейф не приводит к немедленной неисправности, но незаметно снижает точность с течением времени. Регулярная заводская калибровка позволяет поддерживать инерциальный измерительный блок FOG в пределах его первоначальных рабочих параметров.
Технические аспекты интеграции MEMS-инерциальных измерительных блоков
Даже самые точные MEMS-инерциальные измерительные блоки могут терять производительность при неправильной установке.
В роботе для инспекции трубопроводов точная механическая центровка и жесткое крепление имеют решающее значение для надежной инерциальной навигации .
Несоответствие осей инерциального измерительного блока (IMU) и рамы корпуса робота может вызывать ошибки масштабирования и смещения по осям, которые ни одно программное обеспечение не может полностью исправить.
Инерциальные измерительные блоки GuideNav MEMS откалиброваны на заводе с точностью до 200 ppm по ортогональности и обеспечивают интерфейсы RS-422 или CAN для простой интеграции с промышленными контроллерами.
Правильная установка обеспечивает стабильную работу системы и точное отслеживание движения, позволяя осуществлять надежную навигацию в подземных трубопроводах, где отсутствует сигнал GNSS .
Перспективы на будущее — MEMS IMU как «мозг» автономных конвейерных роботов
нового поколения для инспекции трубопроводов переходят к полной автономности.
В основе MEMS-инерциальных измерительных блоков лежит система непрерывной инерциальной навигации , обеспечивающая точный контроль движения и картирование дефектов в условиях отсутствия GNSS-сигнала
В будущих системах будут интегрированы MEMS-инерциальные измерительные блоки GuideNav с аналитикой на основе искусственного интеллекта для более интеллектуальной, самокорректирующейся навигации, что сделает инерциальный измерительный блок не просто датчиком, а интеллектуальным ядром каждого автономного подземного робота.
