Теоретически, инерциальный измерительный блок (ИМБ) может выполнять одометрию — измерение пройденного транспортным средством расстояния путем интегрирования его ускорения и угловой скорости во времени. Однако на практике такая «одометрия только на основе инерциальных данных» непрактична. Проблема заключается в накоплении ошибок : даже крошечные смещения датчиков вызывают дрейф положения, который экспоненциально возрастает со временем. В течение нескольких секунд рассчитанная траектория сильно отклоняется от реальности.
В системах автономного вождения и робототехники, где точность определения местоположения должна оставаться в пределах нескольких сантиметров, одного лишь инерциального измерительного блока (IMU) недостаточно для обеспечения надежной одометрии.
Теоретически, инерциальный измерительный блок (IMU) может вычислять одометрию с помощью двойного интегрирования, но смещение и шум приводят к экспоненциальному дрейфу со временем. Поэтому реальные навигационные системы полагаются на объединение данных IMU с GNSS, LiDAR или камерами для поддержания точности и стабильности.
Инерциальная навигация кажется простой — измерить движение и рассчитать расстояние. Но на практике даже небольшие ошибки датчиков быстро накапливаются и снижают точность. Инерциальный измерительный блок (IMU) — важнейшая часть любой навигационной системы, но он не может работать в одиночку. В этой статье объясняется, почему чистая одометрия на основе IMU неэффективна и как объединение данных с датчиков превращает её в надежный инструмент для точного позиционирования.

Оглавление
Почему инерциальный измерительный блок (IMU) теоретически может выполнять одометрию
Инерциальный измерительный блок (ИМБ) измеряет ускорение по трем осям и угловую скорость по трем осям .
Теоретически, за счет непрерывной интеграции этих сигналов система может вычислить:
- Ориентация (положение тела): определяется интегрированием угловой скорости.
- Скорость: определяется интегрированием линейного ускорения.
- Положение: путем повторного интегрирования скорости.
Это основной принцип работы инерциальной навигационной системы (ИНС) — автономного метода навигации, основанного исключительно на датчиках движения. В идеальном случае, при идеально откалиброванных датчиках и отсутствии шума, инерциальный измерительный блок (ИМБ) мог бы непрерывно определять движение транспортного средства и оценивать его траекторию относительно начальной точки. Именно поэтому теоретически ИТБ может выполнять одометрию без каких-либо внешних опорных точек.
Почему это не работает на практике: проблема накопления ошибок
Хотя теория кажется логичной, каждый инерциальный измерительный блок (IMU) страдает от присущих ему ошибок датчика . Эти небольшие смещения и шумы значительно усиливаются в процессе двойного интегрирования , которое преобразует ускорение в положение. Со временем даже мельчайшие неточности вызывают большой и быстро растущий дрейф.
Ошибка позиционирования растет квадратично со временем
Если акселерометр содержит небольшое постоянное смещение b a (м/с²), то накопленные ошибки скорости и положения со временем увеличиваются следующим образом:
Это означает, что ошибка позиционирования возрастает пропорционально квадрату времени . Даже малейшее смещение может привести к значительному дрейфу.
Например, предположим, что смещение акселерометра b равно 0,01 м/с² — это очень типичное значение для коммерческих MEMS-инерциальных измерительных блоков.
| Время | Ошибка позиционирования |
|---|---|
| 1 с | 0,005 м |
| 10 с | 0,5 м |
| 30 с | 4,5 м |
| 60 с | 18 м |
Всего за одну минуту (60 секунд) работы расчетная погрешность определения местоположения может достигать примерно 18 метров , что значительно превышает точность локализации, необходимую для автономного вождения ( обычно < 0,1–0,3 м ).
Смещение, вызванное гироскопом, приводит к дрейфу ориентации
Небольшое смещение гироскопа может показаться незначительным, но со временем оно приводит к заметным ошибкам в оценке ориентации . Как только происходит дрейф ориентации, инерциальный измерительный блок (IMU) больше не может правильно отделять гравитацию от истинного движения — он не может «удалить гравитацию» из данных акселерометра. В этом случае часть вектора гравитации ошибочно обрабатывается как горизонтальное ускорение , из-за чего система считает, что транспортное средство движется, даже когда оно неподвижно. Это ложное ускорение продолжает интегрироваться в ложную скорость и в конечном итоге приводит к взрывному дрейфу положения .
Другие источники ошибок
Помимо систематической ошибки, на работу реальных инерциальных измерительных блоков (IMU) влияют многочисленные источники ошибок, которые усиливаются со временем:
| Источник ошибки | Влияние |
|---|---|
| Ошибка масштабного коэффициента | Неправильный масштаб измерений ускорения или угловой скорости. |
| Несоосность | Неортогональные оси датчиков приводят к ошибкам проекции. |
| Температурный дрейф | Смещение происходит с температурой, что ухудшает калибровку. |
| Вибрационный шум | Механический шум интегрируется в дрейф положения. |
| Начальная ошибка выравнивания | Небольшие ошибки в настройке при запуске приводят к долгосрочным отклонениям. |
Даже небольшие несовершенства в совокупности приводят к быстрому расхождению навигационных данных. На практике чистая инерциальная одометрия становится непригодной для использования в течение нескольких секунд , даже для высококачественных датчиков.
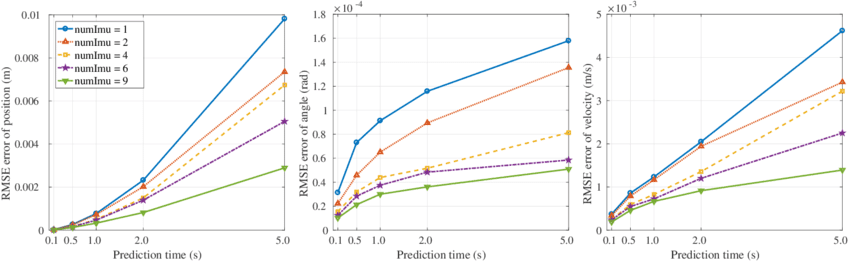
Оценка точности: как долго может работать одометрия, основанная только на данных инерциального измерительного блока (IMU)?
Даже с использованием современных датчиков, инерциальная одометрия может сохранять точность лишь в течение короткого периода времени, после чего выходит из-под контроля. Поскольку ошибка позиционирования увеличивается квадратично со временем, продолжительность надежной работы в основном зависит от класса инерциального измерительного блока (IMU) и стабильности его смещения.
| Класс ИМУ | Типичная предвзятость | Ошибка позиционирования (10 с) | Ошибка позиционирования (60 с) | Практическое применение |
|---|---|---|---|---|
| Потребительский класс | > 0,01 м/с² | > 0,5 м | > 18 м | Совершенно непригодно к использованию |
| Промышленный класс | ~ 0,001 м/с² | ~ 5 см | ~ 1,8 м | Подходит только для коротких тестов |
| Навигационный класс | < 0,0001 м/с² | ~ 0,5 см | ~ 18 см | Точность сохраняется в течение нескольких секунд; всё ещё требуется термоядерный синтез |
| Тактический класс | Чрезвычайно низкий | Управляемый | Несколько метров | Пригоден для использования в военной/аэрокосмической отрасли; высокая стоимость |
Даже самые высококачественные инерциальные измерительные блоки (IMU) не могут вечно избегать дрейфа. Именно поэтому современные автономные системы всегда полагаются на объединение данных с датчиков — сочетание данных IMU с данными GNSS, LiDAR или визуальными данными — для поддержания долгосрочной точности и стабильности.
Роль инерциального измерительного блока (IMU) в современной навигации — объединение данных с датчиков в основе
Хотя инерциальный измерительный блок (IMU) не может самостоятельно выполнять одометрию, он играет незаменимую роль в современной навигации. Вместо того чтобы быть основным источником позиционирования, он выступает в качестве высокочастотной основы , которая усиливает и стабилизирует работу других датчиков.
Оценка высокочастотного движения
Инерциальные измерительные блоки (IMU) работают на частотах от сотен до тысяч герц , что намного быстрее, чем GNSS, LiDAR или камеры.
Высокая частота обновления данных позволяет им фиксировать быстрое движение и заполнять пробелы между более медленными датчиками, обеспечивая плавное и непрерывное отслеживание движения для всей навигационной системы.
Краткосрочное прогнозирование и сглаживание
Когда сигналы GNSS теряются — внутри туннелей, под мостами или в густонаселенных городских районах — инерциальный измерительный блок (IMU) обеспечивает кратковременную инерциальную навигацию для поддержания непрерывной траектории.
Она прогнозирует состояние системы (положение, скорость, ориентацию) на несколько секунд, обеспечивая плавные переходы до тех пор, пока снова не станут доступны внешние измерения.
Благодаря этой возможности сопряжения, инерциальный измерительный блок (IMU) необходим для надежной навигации в условиях отсутствия сигнала GNSS .
Суть объединения данных с датчиков
В современных системах локализации инерциальный измерительный блок (IMU) выступает в качестве динамического ядра многосенсорных систем объединения данных. Его высокоскоростные инерциальные данные обеспечивают непрерывную информацию о движении, в то время как низкоскоростные, но не дрейфующие измерения от других датчиков — таких как GNSS, LiDAR или камеры — постоянно корректируют накопленные ошибки, поддерживая навигацию стабильной и точной.
| Метод слияния | Комбинация датчиков | Приложение |
|---|---|---|
| GNSS/IMU: свободная или плотная связь | RTK-GNSS + IMU | Высокоточная наземная или воздушная навигация |
| Визуально-инерциальная одометрия (ВИО) | Камера + ИМУ | SLAM, БПЛА, робототехника |
| Лидар-инерциальная одометрия (LIO) | Лидар + ИМУ | Автономное вождение, картографирование |
| Факторный граф или объединение данных с помощью фильтра Калмана | Множество датчиков + ИМУ | Интегрированная оценка состояния |
Заключение
Теоретически, инерциальный измерительный блок (IMU) сам по себе может оценивать движение, но на практике его ошибки растут слишком быстро, чтобы быть полезными. Даже малейшие отклонения быстро приводят к дрейфу положения на несколько метров в течение нескольких секунд.
Тем не менее, инерциальный измерительный блок (IMU) остается крайне важным — он предоставляет высокочастотные данные о движении, недоступные другим датчикам. В сочетании с GNSS, LiDAR или камерами он становится основой стабильной и точной навигационной системы.
