Перед началом выполнения миссии беспилотный летательный аппарат (БПЛА) должен выровнять свою инерциальную навигационную систему (ИНС) относительно окружающей среды. Без надлежащей инициализации даже самая лучшая волоконно-оптическая ИНС не сможет обеспечить надежное определение курса, положения или ориентации. Этот процесс может занять всего несколько минут, но инициализация навигации является основой успеха миссии.
Волоконно-оптическая инерциальная навигационная система (ИНС) инициализируется перед взлетом путем стабилизации температуры, выравнивания гироскопов и акселерометров, оценки смещения и выполнения точной настройки положения от грубого к точному, обеспечивая точную навигацию с первой секунды полета.
Инициализация часто недооценивается, хотя именно она определяет, будут ли навигационные данные изначально точными или будут отклоняться от нормы с самого начала. Для БПЛА и других автономных платформ эта процедура включает в себя термообработку, калибровку смещения и выравнивание по ориентации . Каждый этап гарантирует, что инерциальная навигационная система будет готова к выполнению задачи еще до начала вращения двигателей или роторов.
Оглавление
Почему стабилизация температуры является первоочередной задачей?
Перед началом любой юстировки волоконно-оптическая инерциальная навигационная система (ИНС) должна сначала достичь теплового равновесия . Этот этап имеет решающее значение, поскольку колебания температуры напрямую влияют на смещение датчика и масштабный коэффициент. Пропуск этого этапа практически гарантирует плохую инициализацию.
- Гироскопы и акселерометры очень чувствительны к температуре → даже небольшие колебания могут искажать показания.
- Требуется прогрев → системе необходимо время для стабилизации, прежде чем можно будет получать достоверные данные.
- Без стабилизации дрейф смещения может увеличиться в десять раз , что приведет к ухудшению качества выравнивания.
- Рекомендация: включить питание за 10–20 минут до вылета → обеспечить запуск инерциальной навигационной системы с устойчивой базовой линии.
Как оцениваются смещения на этапе инициализации?
После включения и удержания инерциальной навигационной системы (ИНС) в неподвижном состоянии, она измеряет показания своих гироскопов и акселерометров во времени. Эти показания используются для оценки статического смещения , которое представляет собой присущую датчику ошибку при отсутствии движения. Даже микроскопические смещения, если их не корректировать, могут накапливаться и приводить к большим навигационным ошибкам. Путем усреднения и моделирования сигналов на этом этапе ИНС начинает точную настройку с использованием чистых и надежных данных.
Что происходит во время грубой регулировки развала-схождения?
После термостабилизации и оценки погрешности волоконно-оптическая инерциальная навигационная система (ИНС) начинает этап грубой юстировки . На этом этапе система еще не стремится к полной точности, а вместо этого фокусируется на построении надежной первоначальной оценки своей ориентации. Опираясь на естественные ориентиры — гравитацию и вращение Земли — ИНС может установить базовые значения для тангажа, крена и курса. Этот процесс имеет фундаментальное значение, поскольку без надежной грубой юстировки точная юстировка не может корректно сходиться .
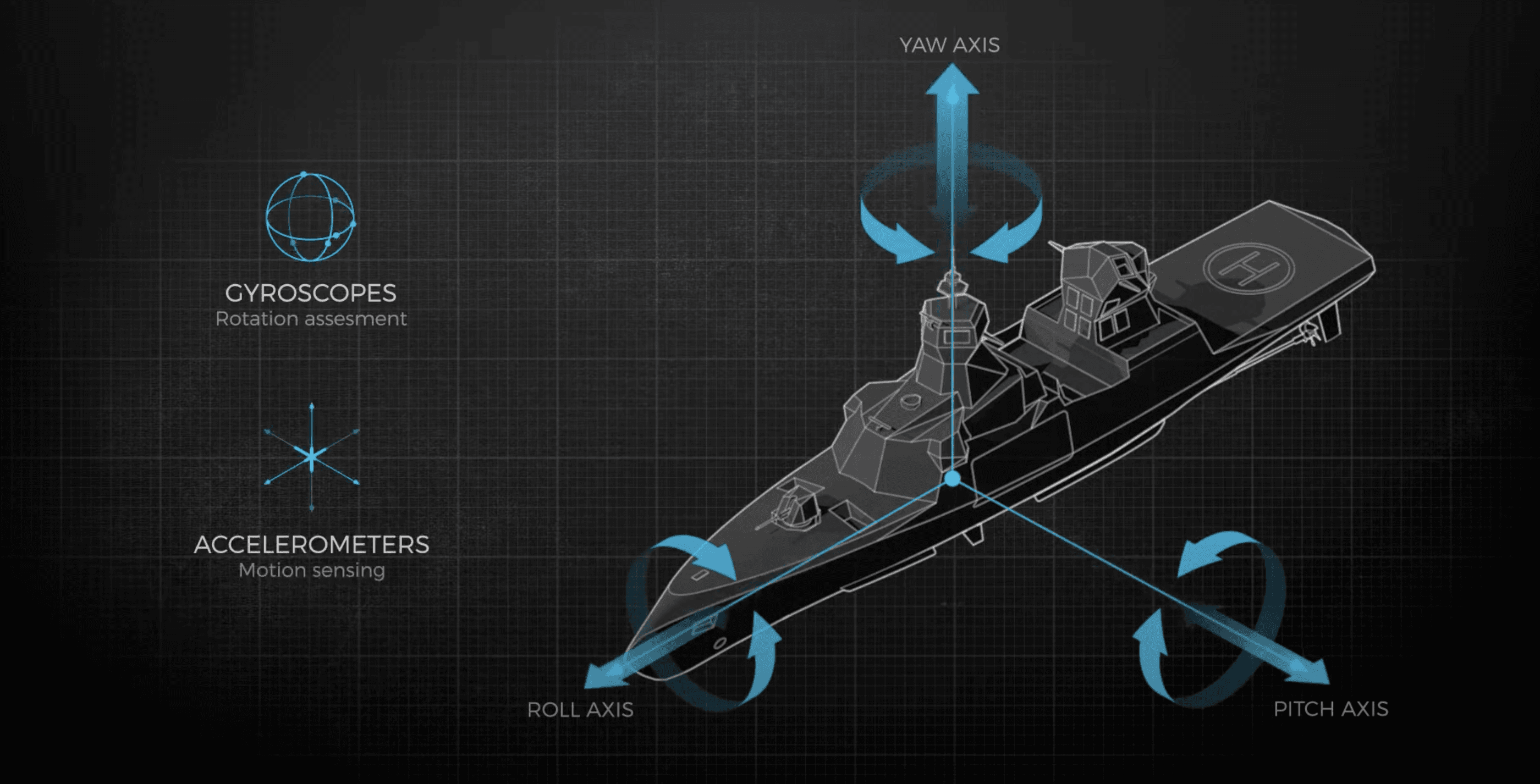
- Гравитация, регистрируемая акселерометрами, обеспечивает определение тангажа и крена.
- Вращение Земли, определяемое с помощью гироскопов, позволяет определить направление движения.
- Процесс занимает несколько минут → позволяет получить приблизительное базовое значение положения тела.
- Эта базовая линия затем уточняется, формируя основу для точной настройки.
Как достигается точная юстировка?
После грубой настройки система переходит к точной настройке , где точность постепенно повышается. На этом этапе волоконно-оптическая инерциальная навигационная система (ИНС) применяет усовершенствованную фильтрацию — часто фильтр Калмана — для объединения выходных сигналов датчиков и уменьшения остаточных ошибок. Точная настройка непрерывно уточняет курс, тангаж и крен , уменьшая небольшие отклонения, остающиеся после грубой настройки. С каждым циклом ИНС приближается к точности навигационного класса , обеспечивая стабильную и надежную ориентацию БПЛА, когда он наконец начнет свою миссию.
Почему инерциальная навигационная система должна оставаться неподвижной?
В процессе инициализации инерциальная навигационная система (ИНС) должна отделить естественные опорные сигналы — гравитацию и вращение Земли — от любого фактического движения платформы. Если БПЛА движется во время этого процесса, показания датчиков искажаются, что приводит к неточной оценке смещения и неправильной настройке. Поэтому для обеспечения надежной инициализации крайне важно сохранять систему в идеально неподвижном состоянии.
Важные моменты, которые следует помнить:
- Движение вносит ложные сигналы , которые система может неправильно интерпретировать как часть процесса выравнивания.
- Стационарные условия позволяют получить истинную оценку смещения , что приводит к созданию более точной модели для коррекции дрейфа.
- Любая вибрация или движение могут задержать или нарушить инициализацию , что приведет к увеличению времени сходимости.
Как вспомогательные системы GNSS улучшают инициализацию?
Системы GNSS могут значительно ускорить процесс выравнивания, предоставляя информацию об абсолютном положении и скорости. В сочетании с волоконно-оптической инерциальной навигационной системой (INS) эти внешние данные сокращают время, необходимое для достижения полной точности навигации.
| С помощью GNSS | Без помощи GNSS |
|---|---|
| Выравнивание происходит гораздо быстрее, зачастую за несколько минут. | Выравнивание осуществляется исключительно с помощью инерциальных датчиков, поэтому для стабилизации требуется больше времени. |
| Точность определения курса быстро повышается, особенно при точной настройке. | Ошибки в заголовках могут оставаться существенными до тех пор, пока не пройдет достаточно времени. |
| Идеально подходит для оперативного развертывания беспилотных летательных аппаратов. | Подходит для работы в условиях отсутствия сигнала GNSS, но требует терпения. |
Каковы риски неправильной инициализации?
Если инициализация выполнена неправильно, ошибки проникают в навигационное решение с самого начала. Эти проблемы могут оставаться незаметными на первых порах, но они могут серьезно повлиять на выполнение задачи после взлета БПЛА.
- Ошибки в заголовке приводят к некорректным навигационным маршрутам и кумулятивному отклонению.
- Отклонения от маршрута → БПЛА могут отклоняться от запланированных траекторий полета, что требует частых корректировок.
- Зависимость от GNSS → снижает надежность в условиях отсутствия GNSS.
- Длительное время сходимости → пустая трата операционного времени и энергии.
- Снижение доверия → операторы не могут полностью доверять навигационному решению.
Последний шаг перед полетом
Представьте себе предполетную инициализацию как тихий обратный отсчет перед запуском ракеты. Снаружи ничего драматичного не происходит, но каждый датчик, каждый алгоритм и каждая схема внутри волоконно-оптической инерциальной навигационной системы (ИНС) встают на свои места. Пропустите обратный отсчет, и запуск рискует провалиться; отнеситесь к нему с уважением, и миссия начнется с уверенностью.
Для операторов БПЛА это означает, что никогда не следует спешить с прогревом, оценкой смещения или выравниванием. Каждый шаг невидим для глаза, но имеет решающее значение для точности в воздухе. Результат прост: меньше неожиданностей, более быстрая сходимость и надежная навигационная система, когда GNSS недоступна.
В GuideNav мы разрабатываем наши волоконно-оптические инерциальные навигационные системы (ИНС) с учетом требований этой области, обеспечивая быстрый прогрев, надежные самотесты и алгоритмы выравнивания . Следуйте правильным шагам, используйте подходящие технологии, и ваш БПЛА всегда будет готов к взлету и решению предстоящих задач.
