Как опытный эксперт в области инерциальных систем, могу сказать, что инерциальное наведение является ключевой технологией во многих высокоточных приложениях, от военных ракет и космических аппаратов до беспилотных летательных аппаратов (БПЛА) и робототехники . Оно обеспечивает надежный и автономный способ навигации, особенно в условиях отсутствия или ненадежности сигналов GPS.
Инерциальная навигация — это метод навигации, позволяющий объекту — например, ракете, самолету, космическому аппарату или даже роботу — определять свое положение и ориентацию без необходимости использования внешних ориентиров, таких как GPS, радар или маяки. Она основана на инерциальных датчиках , таких как гироскопы и акселерометры , которые измеряют изменения скорости и направления, а затем используются для расчета положения и траектории объекта.
В этом руководстве рассматриваются основные компоненты и области применения инерциальной навигации. Давайте углубимся в основы инерциальной навигации, опираясь на наш многолетний опыт, чтобы показать, как эта технология обеспечивает надежную и точную навигацию.
Оглавление
Что такое инерциальная система наведения и каковы её основные компоненты?
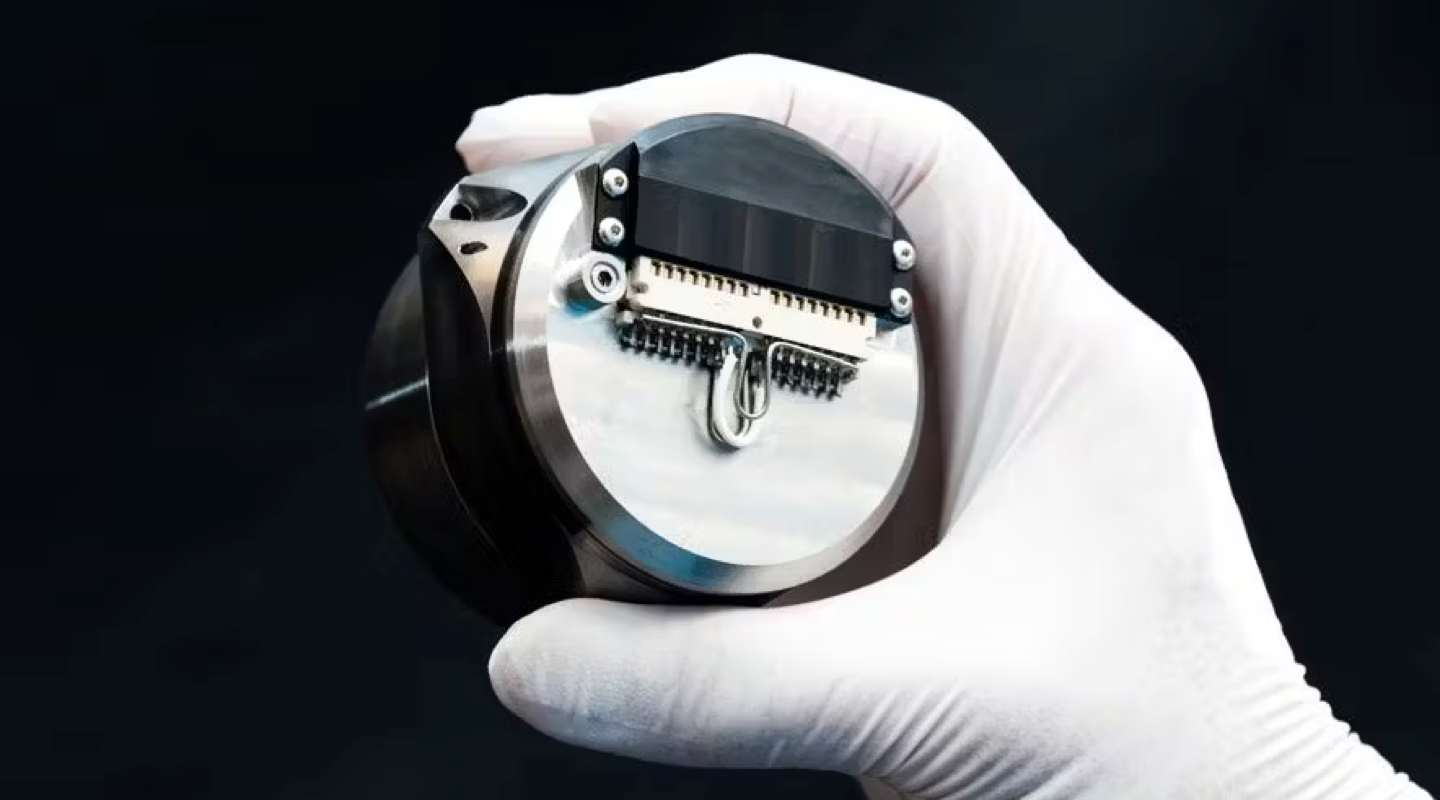
Исходя из моего опыта работы с различными клиентами в аэрокосмической, оборонной и робототехнической отраслях, я знаю, что эффективность любой инерциальной системы наведения зависит от составляющих её компонентов. Вот основные детали, на которые я полагаюсь в системах, с которыми мы работали:
| Компонент | Описание | Функция |
|---|---|---|
| Инерциальный измерительный блок (ИМУ) | Основу системы составляют гироскопы и акселерометры. | Измеряет вращательное и линейное движение для определения ориентации и положения. |
| Гироскопы | Датчики, измеряющие вращательное движение по трем осям (тангаж, крен и рыскание). | Отслеживайте ориентацию объекта, следя за тем, чтобы он оставался на заданном курсе. |
| Акселерометры | Датчики, измеряющие линейное ускорение вдоль различных осей. | Измерение изменений скорости помогает рассчитать положение и скорость. |
| Навигационные алгоритмы | Математические алгоритмы, обрабатывающие данные инерциального измерительного блока (IMU) для вычисления положения, скорости и ориентации. | Интеграция данных с датчиков для обновления оценок местоположения в реальном времени. |
| Система управления | Система, которая корректирует движение объекта на основе рассчитанного положения и ориентации. | Обеспечивает следование объекта по заданному пути или его адаптацию к новым целям. |
| Источник питания | Обеспечивает энергией инерциальные датчики и систему управления. | Обеспечивает бесперебойную работу системы, часто используя встроенные батареи или блоки управления питанием. |
| Механизмы обратной связи (необязательно) | Для коррекции дрейфа и ошибок можно интегрировать внешние системы, такие как GNSS, магнитометры или барометры. | Помогает скорректировать любые отклонения в инерциальной системе и повысить точность в долгосрочной перспективе. |
Как эти компоненты взаимодействуют друг с другом?
В инерциальной системе наведения ключевые компоненты должны работать слаженно, чтобы обеспечить точное и оперативное выполнение задач навигации и управления. Исходя из моего многолетнего опыта, синергия между этими компонентами имеет решающее значение для достижения надежной работы. Вот как эти компоненты взаимодействуют и работают вместе:
1. Сбор данных с инерциального измерительного блока (IMU)
В основе системы лежит инерциальный измерительный блок (ИМБ) , состоящий из гироскопов и акселерометров ускорении и вращательном движении объекта ориентации объекта (например, тангаж, крен и рыскание), а акселерометры измеряют линейное ускорение , что помогает отслеживать изменения скорости и положения. Эти данные служат основой для всех последующих навигационных расчетов.
")
2. Алгоритмы навигации обрабатывают данные
Собранные инерциальным измерительным блоком (IMU) данные передаются алгоритмам навигации положения , скорости и ориентации объекта . Эти вычисления обеспечивают навигационные данные в реальном времени, которые используются для управления системой и направления объекта по его траектории.

3. Система управления регулирует движение
На основе данных, полученных от навигационных алгоритмов, система управления в режиме реального времени корректирует движение объекта. Например, если объект отклоняется от желаемой траектории, система управления корректирует двигательную установку или управляющие поверхности (такие как рули или подруливающие устройства), чтобы скорректировать курс и обеспечить движение объекта по заданной траектории.
4. Механизмы обратной связи корректируют дрейф
Многие инерциальные системы наведения также оснащены механизмами обратной связи , такими как GNSS (глобальная навигационная спутниковая система) или другие внешние датчики (например, магнитометры, барометры). Эти системы обратной связи работают совместно с инерциальным измерительным блоком (IMU) для коррекции дрейфа и ошибок с течением времени. Особенно в длительных миссиях внешние датчики обеспечивают периодическую коррекцию для перекалибровки инерциальной системы, гарантируя поддержание точности в течение продолжительных периодов времени.
5. Источник питания обеспечивает стабильность системы
Источник питания имеет решающее значение для работы всех компонентов системы. Он обеспечивает непрерывный поток энергии для инерциального измерительного блока (IMU), системы управления, алгоритмов навигации и механизмов обратной связи. Эффективное управление питанием особенно важно для длительных режимов работы, таких как системы наведения космических аппаратов или ракет, где надежность и стабильность имеют критическое значение.
Применение инерциальной системы наведения
Инерциальная навигация — это основополагающая технология в широком спектре отраслей, требующих автономной навигации и точного управления . Возможность работать без использования внешних сигналов, таких как GPS или радиосигналы, делает инерциальную навигацию незаменимой во многих критически важных областях применения. Вот основные области, где инерциальные системы наведения широко используются:
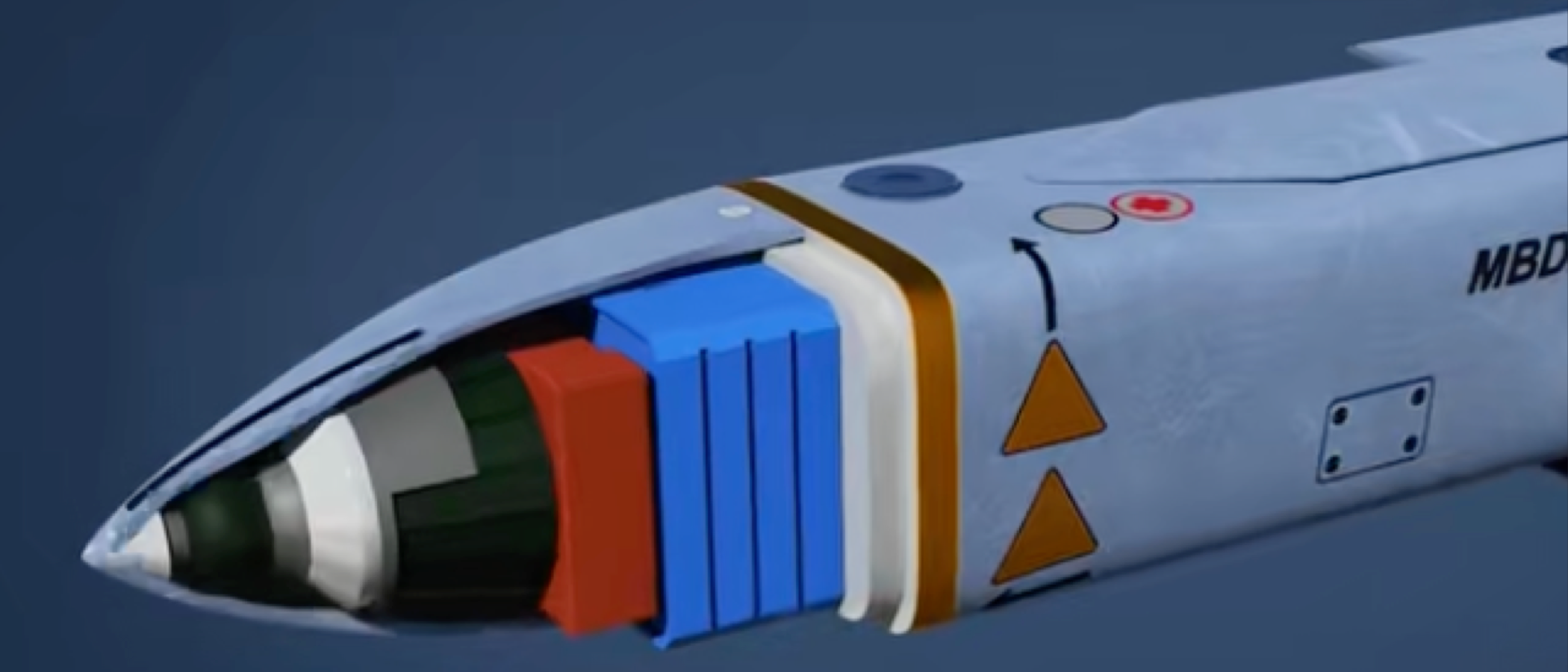
1. Военное дело и оборона
Одно из наиболее известных применений инерциальной системы наведения — в военной и оборонной сферах . Инерциальные системы наведения имеют решающее значение для управления ракетами , торпедами и беспилотными летательными аппаратами (БПЛА) . Эти системы гарантируют, что снаряды или летательные аппараты будут оставаться на правильной траектории к цели, даже в условиях отсутствия или преднамеренного подавления сигналов GPS.
| Приложение | Цель | Ключевое преимущество |
|---|---|---|
| Наведение ракет | Обеспечивает попадание ракет в намеченные цели | Обеспечивает точность и независимость от внешних сигналов. |
| Торпеды | Отслеживает подводные цели в условиях отсутствия GPS-сигнала | Работает в подводных и субмариновых условиях без зависимости от внешних сигналов. |
| БПЛА (дроны) | Автономный полёт для наблюдения и разведки | Работает в городских районах или зонах, где отсутствует GPS-сигнал, и где спутниковые сигналы могут быть слабыми. |
2. Аэрокосмическая отрасль
В аэрокосмической отрасли инерциальная навигация имеет важное значение для навигации космических аппаратов , управления ориентацией летательных аппаратов и позиционирования спутников . Она позволяет космическим миссиям работать автономно, не полагаясь на внешние источники, что особенно важно для исследования дальнего космоса или спутниковых систем, где сигналы GPS недоступны.
| Приложение | Цель | Ключевое преимущество |
|---|---|---|
| Навигация космического аппарата | Обеспечивает точное перемещение и ориентацию в пространстве | Обеспечивает автономное управление в дальнем космосе. |
| Система управления положением самолета | Обеспечивает поддержание углов тангажа, рыскания и крена самолета | Обеспечивает стабильность и контроль в условиях турбулентности. |
| Спутниковое позиционирование | Обеспечивает удержание спутников на орбите или на правильной траектории | Работает в космосе без необходимости использования GPS. |
3. Автономные транспортные средства
Инерциальная навигация — важнейший компонент автономных транспортных средств . Будь то беспилотные автомобили , автономные грузовики или дроны , инерциальная навигация помогает поддерживать точную навигацию даже при слабом, прерывистом или недоступном сигнале GPS. Она обеспечивает точное определение местоположения в городских условиях или подземных пространствах , где на GPS полагаться нельзя.
| Приложение | Цель | Ключевое преимущество |
|---|---|---|
| Автомобили с автопилотом | Обеспечивает автономную навигацию в городских условиях | Обеспечивает отслеживание местоположения в реальном времени без GPS. |
| Автономные грузовики | Позволяет грузовикам передвигаться по автомагистралям или на складах | Обеспечивает независимую навигацию в зонах, где отсутствует GPS-сигнал. |
| Дроны | Позволяет дронам перемещаться без GPS или в местах с препятствиями | Обеспечивает безопасный и точный полет в городских условиях или в помещениях. |
4. Морская и подводная навигация
Инерциальные системы наведения широко используются в морской навигации и подводных исследованиях . Подводные лодки , автономные подводные аппараты (АППА) и дистанционно управляемые аппараты (РОВ) используют инерциальные системы наведения для навигации в глубоких океанах , куда не достигают сигналы GPS. Эти системы обеспечивают точное отслеживание положения и корректировку ориентации для обеспечения правильного движения и исследования.
| Приложение | Цель | Ключевое преимущество |
|---|---|---|
| Подводные лодки | Автономная подводная навигация | Обеспечивает автономную навигацию в условиях отсутствия GPS-сигнала. |
| Автономные подводные аппараты (АППА) | Обеспечивает возможность подводных исследований и сбора данных | Работает в глубоких водах без привязки к GPS. |
| Дистанционно управляемые подводные аппараты (ROV) | Используется для дистанционного управления под водой | Обеспечивает точные движения при выполнении таких задач, как осмотр и обследование. |
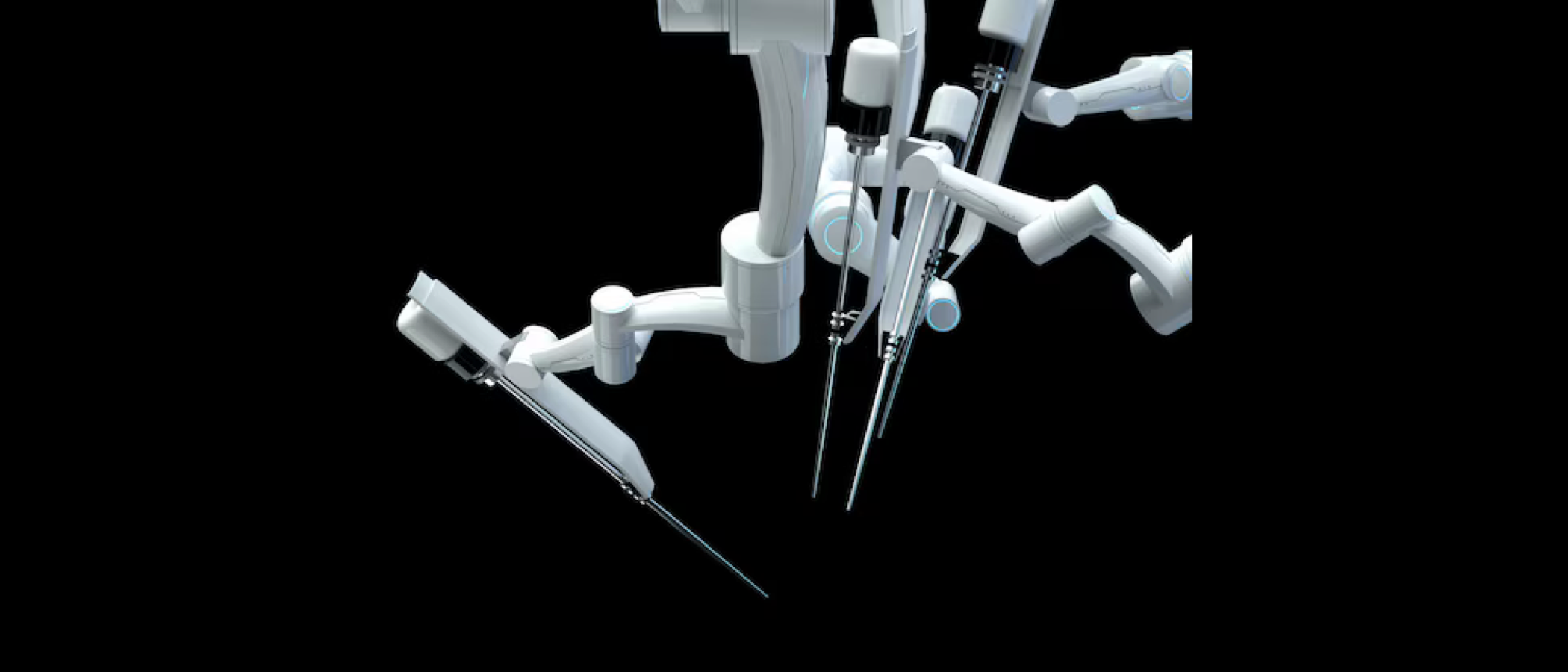
5. Робототехника и промышленная автоматизация
В робототехнике и промышленной автоматизации инерциальная навигация помогает поддерживать положение и ориентацию роботизированных манипуляторов , автоматизированных транспортных средств (AGV) и других автоматизированных систем. Эти системы используют инерциальную навигацию для точного планирования траектории и отслеживания движения при выполнении задач на заводах, складах или даже в опасных условиях.
| Приложение | Цель | Ключевое преимущество |
|---|---|---|
| Роботизированные манипуляторы | Обеспечивает точность при выполнении таких задач, как сборка или производство | Позволяет роботам выполнять задачи автономно с высокой точностью |
| Автоматизированные транспортные средства (AGV) | Автономная навигация на складах или заводах | Обеспечивает эффективное перемещение и отслеживание траектории в помещениях |
| Роботизированная хирургия | Обеспечивает точные движения во время операции | Обеспечивает точное наведение хирургических инструментов во время малоинвазивных операций |
Чем инерциальные системы наведения отличаются от инерциальных навигационных систем?
Инерциальные системы наведения и инерциальные навигационные системы — это две тесно связанные, но различные технологии, которые служат разным целям, и понимание различий между ними имеет решающее значение для выбора подходящей системы для конкретных задач.
Когда мы говорим об инерциальной навигации , мы в первую очередь имеем в виду управление движением объекта, такого как ракета, беспилотник или космический аппарат. Эти системы не только отслеживают положение объекта, но и активно корректируют его траекторию, чтобы обеспечить его следование заданному курсу. С другой стороны, инерциальные навигационные системы (ИНС) предназначены для отслеживания и передачи данных о положении, скорости и ориентации объекта без необходимости внесения корректировок в его движение. Хотя ИНС предоставляют данные , они не управляют движением объекта напрямую.
По моему опыту, понимание функциональных различий между этими системами является ключом к их эффективному применению в таких областях, как оборона , аэрокосмическая промышленность и автономные транспортные средства . Инерциальная система наведения отвечает за коррекцию траектории в реальном времени и обнаружение цели , в то время как инерциальная навигация отвечает за отслеживание положения и поддержание точной системы координат с течением времени.
1. Основная функция
- Инерциальные системы наведения (ИГН) : Основная функция инерциальной системы наведения заключается в управлении и направлении движения объекта (например, ракеты, беспилотника или космического аппарата) к определенной цели или пункту назначения. Она фокусируется на наведении объекта путем непрерывной корректировки его траектории на основе данных от внутренних датчиков (в основном гироскопов и акселерометров). Система вносит корректировки в реальном времени, чтобы гарантировать, что объект остается на правильном пути к своей цели.
- Инерциальные навигационные системы (ИНС) : В отличие от других систем, инерциальные навигационные системы предназначены для определения местоположения и отслеживания. положение, скорость и ориентацию объекта на основе данных акселерометров и гироскопов. Главная цель ИНС — отслеживать местоположение объекта и скорость его движения без внешних источников данных (например, GPS). Она не управляет движением объекта напрямую, а предоставляет точные данные о местоположении и скорости .
2. Управление против отслеживания
- Инерциальные системы наведения : Эти системы не только отслеживают положение и ориентацию объекта, но и управляют его движением . Система наведения рассчитывает необходимые корректировки для поддержания определенной траектории или пути к цели. Например, в ракете инерциальная система наведения корректирует траекторию полета ракеты, чтобы обеспечить достижение цели, внося поправки в реальном времени в скорость, направление и высоту полета ракеты.
- Инерциальные навигационные системы (ИНС), с другой стороны, больше ориентированы на позиционирование . Они отслеживают и сообщают, где находится объект в пространстве, часто используясь в сочетании с другими системами (например, GPS) для коррекции. ИНС не обязательно контролирует движение объекта, но предоставляет важные данные для навигации , позволяя операторам точно знать, где находится объект и куда он направляется.
3. Примеры применения
- Инерциальные системы наведенияОбычно их можно найти в военный, исследование космоса, и автономные транспортные средстваОни используются для наведения снарядов (например, ракет), космических аппаратов или беспилотников, обеспечивая их следование заданному курсу для поражения цели или выполнения миссии. Например:
- Система наведения ракеты обеспечивает достижение цели путем постоянной корректировки траектории на основе инерциальных измерений.
- Космические аппараты используют инерциальную систему наведения для корректировки своей траектории и поддержания ориентации в космосе.
- Беспилотные летательные аппараты (БПЛА) используют инерциальную систему наведения для отслеживания целей и автономного полета .
- Инерциальные навигационные системыСистемы инерциальной навигационной навигации (ИНС) в основном используются в аэрокосмическая отрасль, морской, и робототехникаПриложения, где знание точного местоположения и ориентации объекта имеет решающее значение. Например:
- Самолеты используют инерциальную навигационную систему (ИНС) для навигации при полетах на большие расстояния, особенно вне зоны действия GPS.
- Подводные лодки используют инерциальную навигационную систему (ИНС) для подводной навигации в местах, куда не доходят сигналы GPS.
- робототехнике инерциальные навигационные системы (ИНС) используются для отслеживания положения и автономного перемещения в пределах заданной области.
4. Коррекции в режиме реального времени
- Инерциальные системы наведения : Система наведения часто использует данные в реальном времени для немедленной корректировки. Система непрерывно корректирует траекторию объекта, чтобы обеспечить достижение цели, часто используя механизмы отслеживания цели и (например, внешние датчики или GPS) для исправления любых отклонений.
- Инерциальные навигационные системы ( : Хотя ИНС предоставляют данные о местоположении , они, как правило, не вносят коррективов в траекторию объекта. Вместо этого они полагаются на внешние поправки (например, GPS, радар) для уменьшения дрейфа, вызванного неточностями датчиков с течением времени. ИНС отслеживает движение, но не выступает в качестве корректирующей или направляющей силы.
5. Сложность системы
- Инерциальные системы наведения : Эти системы, как правило, более сложны, поскольку им необходимо не только вычислять положение и ориентацию, но и активно корректировать движение . Это требует сложных алгоритмов управления и интеграции с другими системами наведения или слежения за целью. Системы наведения часто включают в себя такие механизмы, как серводвигатели , системы управления тягой и системы управления полетом для внесения корректировок в реальном времени.
- Инерциальные навигационные системы ( ИНС): Системы ИНС проще по концепции по сравнению с системами наведения. Они предназначены в первую очередь для отслеживания и передачи данных о движении, часто используя объединения данных с датчиков для повышения точности. Системы ИНС имеют решающее значение для непрерывного отслеживания положения , но они не контролируют движение объекта.
Краткое изложение различий:
| Аспект | Инерциальные системы наведения (ИГН) | Инерциальные навигационные системы (ИНС) |
|---|---|---|
| Основная функция | Направляет и контролирует движение | Отслеживает положение, скорость и ориентацию |
| Контроль | Управляет движением объекта (коррекция в реальном времени) | Не управляет движением, а только отслеживает положение |
| Приложения | Военная техника (ракеты), аэрокосмическая техника (космические аппараты), беспилотные летательные аппараты | Аэрокосмическая отрасль, морская промышленность, робототехника, беспилотные транспортные средства |
| Исправления | Корректировка траектории в реальном времени | Предоставляет данные; со временем требует внесения внешних корректировок |
| Сложность | Более сложная структура из-за особенностей управления и навигации | Проще, в основном для отслеживания местоположения |
| Обратная связь | Часто использует обратную связь для корректировки траектории | Как правило, полагается на внутренние датчики и периодические внешние корректировки |
Будущее инерциальной навигации
1. Повышенная точность и автономность в обороне
В военных целях инерциальная навигация уже используется в управляемых ракетах , беспилотных летательных аппаратах (БПЛА) и автономных дронах . По мере алгоритмов объединения данных с датчиков и , будущие системы обеспечат еще более высокую точность , большую автономность и возможность работы в условиях, когда внешние сигналы (например, GPS) недоступны или заглушены.
Что дальше:
- Полностью автономные управляемые ракеты коррекцией курса в реальном времени .
- Беспилотные летательные аппараты с автономным управлением, способные выполнять задачи без внешней поддержки.
2. Исследование космоса и управление спутниками
В области исследования космоса инерциальная навигация будет и впредь оставаться краеугольным камнем для автономных космических зондов и спутниковой навигации . По мере того как космические миссии становятся все более сложными и удаленными, инерциальная навигация обеспечит бесперебойное управление в дальнем космосе и за пределами земной атмосферы.
Что дальше:
- Усовершенствованные инерциальные системы для межпланетных миссий, обеспечивающие точную корректировку траектории.
- Автономные космические зонды, осуществляющие навигацию без зависимости от наземных систем.
3. Интеграция с ИИ для адаптивной производительности
В будущих инерциальных системах наведения будут интегрированы искусственный интеллект и машинное обучение , что позволит системам динамически адаптироваться к изменяющейся среде. Эта интеграция улучшит коррекцию ошибок , компенсацию дрейфа и оптимизирует корректировку траектории на основе данных в реальном времени и параметров миссии.
Что дальше:
- Самообучающиеся системы наведения , которые непрерывно адаптируют свои характеристики в полете или движении.
- Принятие решений на основе искусственного интеллекта для автономных дронов и военных целей, повышение операционной эффективности.
4. Повышенная долговечность и надежность в суровых условиях эксплуатации
Поскольку инерциальные системы наведения используются во все более сложных условиях, таких как глубоководные районы или космос , их надежность значительно повысится. Благодаря использованию современных материалов и инновационных конструкций эти системы станут более долговечными и надежными, способными выдерживать экстремальные температуры, перепады давления и вибрацию.
Что дальше:
- Надежные инерциальные системы для подводных лодок , освоения космоса и высокоэффективных военных применений .
- Резервные системы обеспечивают надежность даже в самых неблагоприятных условиях.
5. Миниатюризация и интеграция с автономными системами
Миниатюризация инерциальных датчиков будет продолжаться, что позволит создавать более компактные и интегрированные системы для использования в автономных транспортных средствах , робототехнике и беспилотных летательных аппаратах , но и повысят эффективность автономного управления и навигации .
Что дальше:
- Компактные инерциальные системы наведения, интегрированные в автономные наземные транспортные средства и дроны, обеспечивают большую независимость в районах, где отсутствует GPS-сигнал.
- Автономная навигация в сложных условиях с инерциальным наведением в реальном времени .