
Centrale inertielle (IMU) de confiance dans le monde entier
Unité de mesure inertielle
Plus de 15 000 systèmes IMU en service dans plus de 35 pays
Des solutions sur mesure plébiscitées par les acteurs clés mondiaux
Les solutions d'unités de mesure inertielle (IMU) de GuideNav sont conçues pour offrir des performances exceptionnelles dans les secteurs de l'aérospatiale, de la défense et de l'industrie. Que vous ayez besoin d'une IMU MEMS compacte et économique ou d'une IMU FOG ultra-précise, nous fournissons une technologie de pointe éprouvée dans les environnements les plus exigeants.
Modèle d'IMU à base de MEMS présenté par Guidenav
MODÈLES D'IMU MEMS EN VEDETTE
- rentable
- Plage de vitesse du gyroscope : ± 500 °/s
- Instabilité de polarisation : ≤ 2 °/h
- Stabilité du biais : ≤ 10°/h
- Poids : ≤ 10 g
- Protocole : UART

- Intuitionneur MEMS à 10 axes
- Plage de vitesse du gyroscope : ± 450 °/s
- Instabilité de biais : ≤ 2°/h
- Stabilité du biais : ≤ 4°/h
- Poids : ≤ 40 g
- Protocole : SPI
- Intuitionneur MEMS à 10 axes
- Plage de vitesse du gyroscope : ± 450 °/s
- Instabilité de biais : ≤ 0,8 °/h
- Stabilité du biais : ≤ 3°/h
- Poids : ≤ 40 g
- Protocole : SPI

- Précision moyenne à élevée
- Plage de vitesse du gyroscope : ± 320 °/s
- Instabilité de biais : ≤ 0,4 °/h
- Stabilité du biais : ≤ 2°/h
- Poids : ≤ 10 g
- Protocole : RS422

- Large gamme de gyroscopes
- Plage de vitesse du gyroscope : ± 2000 °/s
- Instabilité de polarisation : ≤ 3 °/h
- Stabilité du biais : ≤ 10°/h
- Poids : ≤ 30 g
- Protocole : UART

- GUN-HARD jusqu'à 20 000 g
- Plage de vitesse du gyroscope : jusqu'à 6000 °/s
- Instabilité de biais : ≤ 3°/h
- Stabilité du biais : ≤ 10°/h
- Poids : ≤ 50 g
- Protocole : UART

- Haute précision
- Plage de vitesse du gyroscope : ± 450 °/s
- Instabilité de biais : ≤ 0,2 °/h
- Stabilité du biais : ≤ 1°/h
- Poids : ≤ 40 g
- Protocole : RS422

- Ultra-haute précision
- Plage de vitesse du gyroscope : ± 400 °/s
- Instabilité de biais : ≤ 0,1 °/h
- Stabilité du biais : ≤ 0,5°/h
- Poids : ≤ 55 g
- Protocole : RS422
Unité de mesure inertielle à fibre optique présentée par Guidenav
MODÈLES D'IMU DE FROUILLE EN VEDETTE

- Précision moyenne
- Stabilité du biais (10 s) ≤ 0,1 °C/h
- Déplacement aléatoire angulaire du gyroscope : ≤ 0,02 deg/√h
- Plage de ± 500 °/s
- Poids : < 900 grammes
- Précision moyenne à élevée
- Stabilité du biais (10 s) ≤ 0,05 °C/h
- Déplacement aléatoire angulaire du gyroscope : ≤0,005 deg/√h
- Plage de ± 500 °/s
- Poids : < 1200 grammes

- Haute précision
- Stabilité du biais (10 s) ≤ 0,01 °C/h
- Déplacement aléatoire angulaire du gyroscope : ≤ 0,0005 deg/√h
- Plage de ± 300 °/s
- Poids : < 5000 grammes
- Ultra-haute précision
- Stabilité du biais (10 s) ≤ 0,005 °C/h
- Déplacement aléatoire angulaire du gyroscope : ≤ 0,0003 deg/√h
- Plage de ± 500 °/s
- Poids : < 5000 grammes
Obtenez votre solution personnalisée dès maintenant
Votre projet mérite une solution parfaitement adaptée à vos spécifications. Afin de vous fournir les centrales inertielles (IMU) les plus performantes, nous vous invitons à nous communiquer les paramètres et exigences de performance spécifiques à vos applications. Qu'il s'agisse de précision, de stabilité ou de contraintes d'encombrement, notre équipe est à votre disposition pour vous aider à trouver la solution idéale.
Table des matières
Télécharger cette page au format PDF
Pour vous faire gagner du temps, nous avons également préparé une version PDF contenant l'intégralité du contenu de cette page ; il vous suffit de laisser votre adresse e-mail et vous recevrez immédiatement le lien de téléchargement.
Présentation de l'unité de mesure inertielle (IMU)
Qu'est-ce qu'une unité de mesure inertielle ?
Une centrale inertielle (IMU) est un dispositif qui mesure l'accélération, la vitesse angulaire et parfois le champ magnétique d'un objet, fournissant ainsi des données sur son mouvement et son orientation. Elle se compose généralement d'accéléromètres, de gyroscopes et parfois de magnétomètres. Les centrales inertielles sont essentielles aux systèmes exigeant une navigation précise, comme dans les domaines de l'aérospatiale, de la défense et de la robotique, où elles contribuent à maintenir un positionnement et une stabilité précis sans dépendre de références externes telles que le GPS.
Applications des centrales inertielles (IMU)
Applications des centrales inertielles (IMU)
01
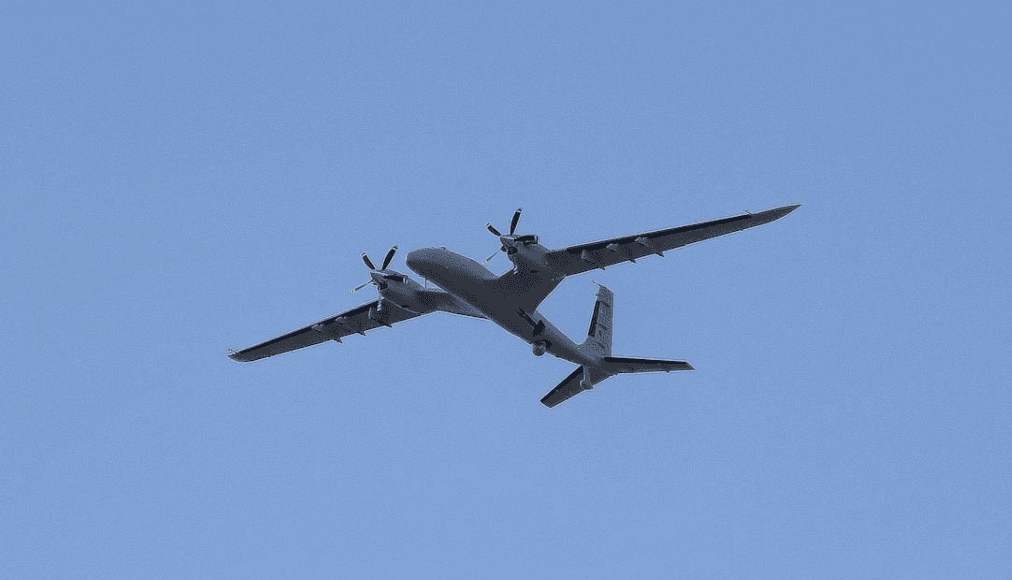
Aérospatiale et aviation
Les centrales inertielles (IMU) sont essentielles à la navigation et au contrôle des aéronefs. Elles contribuent au maintien de l'orientation et fournissent des données en temps réel aux systèmes de pilotage automatique, permettant ainsi aux aéronefs de maintenir leur cap et d'améliorer la sécurité des vols.
02
Défense et armée
Les centrales inertielles (IMU) sont largement utilisées dans les missiles, les drones et les véhicules militaires pour assurer un suivi de mouvement précis, la navigation et le guidage des cibles. Elles permettent aux systèmes autonomes de fonctionner avec précision même dans des environnements sans GPS.
03
Véhicules autonomes et drones
Dans les voitures autonomes et les drones, les centrales inertielles (IMU) fournissent un retour d'information continu sur l'orientation, la vitesse et le mouvement, contribuant à stabiliser le vol et à assurer une navigation précise dans des environnements complexes.
04
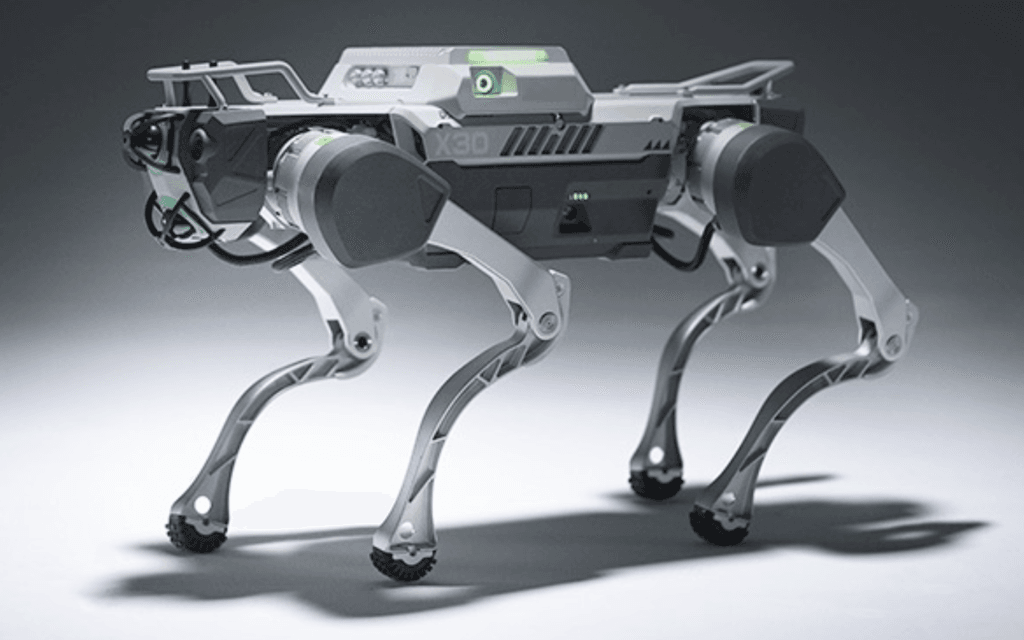
Robotique
Les centrales inertielles (IMU) sont essentielles en robotique pour un contrôle précis des mouvements. Elles sont utilisées dans les robots pour suivre leur position et leur orientation, permettant ainsi des déplacements efficaces et autonomes dans les robots industriels, médicaux et de service.
05
Levés géophysiques
En exploration géophysique, les centrales inertielles sont utilisées dans les équipements de détection et de mesure des mouvements sismiques, fournissant des données précieuses pour la recherche scientifique et l'exploration des ressources.


Pourquoi une centrale inertielle ?
Pourquoi choisir une centrale inertielle (IMU) plutôt qu'un simple gyroscope ?
Bien que les centrales inertielles (IMU) et les gyroscopes mesurent tous deux la vitesse angulaire, une IMU offre une solution plus complète en combinant plusieurs capteurs pour fournir une gamme plus étendue de données de mouvement et d'orientation. Voici les principales raisons
Suivi de mouvement complet
Alors qu'un gyroscope ne mesure que la vitesse angulaire, une centrale inertielle (IMU) combine des accéléromètres et parfois des magnétomètres pour suivre à la fois l'accélération linéaire et la rotation angulaire, offrant un profil de mouvement 3D complet.Un positionnement plus précis :
les gyroscopes peuvent dériver avec le temps. Une centrale inertielle (IMU) corrige ce problème grâce aux données d’un accéléromètre, assurant ainsi une orientation et un positionnement plus stables et précis sur de plus longues périodes.Meilleures performances dans les environnements sans GPS :
(IMU) sont idéales pour les applications où le GPS n'est pas disponible, comme à l'intérieur, sous l'eau ou dans l'espace, car elles mesurent à la fois l'accélération et la rotation, offrant ainsi des données de navigation complètes.Conception simplifiée du système :
Une centrale inertielle (IMU) intègre plusieurs capteurs dans une seule unité compacte, réduisant ainsi la complexité du système et le besoin d'accéléromètres et de gyroscopes séparés.




Paramètres clés de l'unité de mesure inertielle (IMU)
Caractéristiques principales d'une centrale inertielle (IMU)
Instabilité de biais (gyroscope)
: Mesure la stabilité du gyroscope dans le temps sans entrées externes, généralement exprimée en °/h. Les valeurs les plus basses indiquent une stabilité plus élevée, ce qui est essentiel pour les applications de précision telles que la navigation et le guidage.La marche aléatoire angulaire
indique le niveau de bruit dans les mesures de vitesse angulaire, exprimé en °/√h. Une marche aléatoire plus faible garantit de meilleures performances lors des opérations à long terme.La plage de mesure
spécifie l'accélération maximale (g) ou la vitesse angulaire maximale (°/s) que l'IMU peut mesurer. Une plage plus étendue lui permet de gérer des environnements plus dynamiques.La bande passante
définit la rapidité avec laquelle l'IMU peut réagir aux changements, généralement mesurée en Hz. Une bande passante plus élevée prend en charge les applications nécessitant des mises à jour rapides des données, telles que les drones ou la robotique.La tolérance environnementale
inclut la plage de températures de fonctionnement et la résistance aux vibrations et aux chocs. Ceci garantit le fonctionnement fiable de l'IMU dans des conditions difficiles, comme dans les applications aérospatiales ou militaires.
MEMS IMU vs. IMU à fibre optique : laquelle est la meilleure ?
Le choix entre les centrales inertielles MEMS et les gyroscopes à fibre optique (FOG) dépend des exigences spécifiques de votre projet. Les centrales inertielles MEMS standard sont compactes, économiques et idéales pour les applications nécessitant une précision modérée. Cependant, les progrès technologiques permettent désormais aux centrales inertielles MEMS de haute précision d'atteindre une instabilité de biais aussi faible que 0,1°/h , les rendant ainsi adaptées à certaines applications militaires et aérospatiales traditionnellement dominées par les centrales inertielles FOG.
Les centrales inertielles à gyroscope (FOG IMU) restent toutefois le choix privilégié pour les applications exigeant une précision extrême , une stabilité à long terme et une fiabilité à toute épreuve dans des environnements extrêmes. Vous trouverez ci-dessous un tableau comparatif détaillé pour vous aider à choisir :
| Fonctionnalité | MEMS IMU | IMU FOG |
|---|---|---|
| Précision | Les centrales inertielles MEMS standard offrent une précision modérée. Les centrales inertielles MEMS haute précision peuvent atteindre une instabilité de biais aussi faible que 0,1°/h , comparable à celle des centrales inertielles FOG d'entrée de gamme. | Offrant une précision ultra-élevée avec une instabilité de biais aussi faible que 0,001°/h , elles sont idéales pour les opérations critiques de longue durée. |
| Taille et poids | Compactes et légères, elles conviennent parfaitement aux systèmes soumis à des contraintes strictes de taille et de poids, tels que les drones ou la robotique. | Plus grand et plus lourd, conçu pour les systèmes où la performance prime sur la taille. |
| Tolérance environnementale | Robustesse accrue face aux chocs, aux vibrations et aux variations de température, notamment pour les MEMS de conception avancée. Fiabilité garantie pour la plupart des applications industrielles et militaires. | Fiabilité exceptionnelle dans des conditions extrêmes, notamment en cas de chocs importants, de vibrations et de contraintes opérationnelles prolongées. |
| Coût | Plus économiques, notamment pour les applications où une précision standard suffit, les centrales inertielles MEMS haute précision sont plus abordables que les centrales inertielles FOG pour une précision comparable. | Un coût plus élevé dû à la complexité de la technologie optique, mais justifié pour les systèmes exigeant une stabilité et une précision inégalées. |
| Applications | Convient à la navigation à usage général dans les drones, la robotique, les systèmes industriels et certaines applications militaires si l'on utilise des MEMS de haute précision. | Privilégié pour l'aérospatiale, les missiles, les sous-marins et les systèmes de défense critiques nécessitant une stabilité à long terme et une ultra-haute précision. |
Présentation de l'unité de mesure inertielle (IMU)
à six axes contre
unité de mesure inertielle à neuf axes
Lorsqu'on s'intéresse aux centrales inertielles (IMU), on rencontre fréquemment des termes comme « IMU six axes » et « IMU neuf axes ». Ces appellations font référence au nombre et au type de capteurs intégrés à l'appareil. Comprendre la différence entre les IMU six axes et neuf axes peut vous aider à choisir le capteur le mieux adapté à votre application.
| Fonctionnalité | Inertie à six axes | Inertie à neuf axes |
|---|---|---|
| Composants | Accéléromètre 3 axes Gyroscope 3 axes | Accéléromètre 3 axes, gyroscope 3 axes, magnétomètre 3 axes |
| Fonctionnalité | Mesure l'accélération linéaire et la vitesse angulaire | Mesure l'accélération linéaire, la vitesse angulaire et le cap absolu |
| Précision | Bon pour la stabilité à court terme | Précision accrue et dérive réduite au fil du temps |
| Applications | Drones, robotique, électronique grand public | Systèmes de navigation, réalité augmentée, véhicules autonomes |
| Coût | Généralement plus abordable | Généralement plus élevé en raison du capteur supplémentaire |
Étalonnage de l'unité de mesure inertielle
Qu’est-ce que l’étalonnage d’une centrale inertielle ?
Un étalonnage précis d'une centrale inertielle est essentiel pour garantir sa précision dans l'application visée. Sans étalonnage, les données de la centrale peuvent être incohérentes, entraînant des dysfonctionnements du système. Ceci peut affecter la précision de la navigation des drones, le suivi de trajectoire dans les applications aérospatiales ou la stabilité des systèmes robotiques.
Les centrales inertielles (IMU) sont généralement composées d'accéléromètres, de gyroscopes et parfois de magnétomètres. Chacun de ces capteurs peut être sujet à diverses sources d'erreur, telles que les fluctuations de température, les contraintes mécaniques ou les tolérances de fabrication. Les méthodes d'étalonnage permettent d'atténuer ces problèmes afin de garantir des données précises et fiables.
Unité de mesure inertielle vs AHRS vs INS
IMU vs AHRS vs INS : Quelle est la différence ?
- Centrale inertielle (IMU) : Mesure l’accélération et la vitesse angulaire. Elle fournit des données brutes sur le mouvement, mais ne calcule ni l’orientation ni la position.
- AHRS (Attitude and Heading Reference System) : Développe l'IMU en fournissant des informations en temps réel sur l'orientation (tangage, roulis, lacet) et le cap, souvent en intégrant des magnétomètres et un GPS.
- INS (Système de navigation inertielle) : Combine les fonctions de l'IMU et des algorithmes avancés pour fournir des données de position, de vitesse et d'orientation sans dépendre de références externes comme le GPS.
| Fonctionnalité | IMU | AHRS | INS |
|---|---|---|---|
| But | Mesure l'accélération et la vitesse angulaire | Fournit des informations d'orientation (tangage, roulis, lacet) et de cap en temps réel | Fournit des données de navigation complètes : position, vitesse et orientation |
| Capteurs | Accéléromètre, gyroscope (parfois magnétomètre) | IMU + Magnétomètre (parfois GPS) | IMU + Algorithmes avancés (souvent avec GPS ou entrées externes) |
| Sortie de données | Données brutes (accélération, vitesse angulaire) | Orientation (tangage, roulis, lacet), cap | Position, vitesse et orientation au fil du temps |
| Externe | Nécessite des systèmes externes (GPS, magnétomètres) pour une orientation complète | Utilise des magnétomètres et le GPS pour corriger la dérive | Fonctionne de manière autonome (peut être complété par un GPS) |
| Type d'IMU FOG | Gamme de prix | Application |
|---|---|---|
| IMU FOG d'entrée de gamme | $10,000 - $30,000 | Usage commercial ou industriel général, drones, véhicules autonomes de base |
| IMU FOG de moyenne gamme | $30,000 - $70,000 | Applications militaires, aérospatiale, navigation maritime de haute précision |
| IMU FOG haut de gamme | $70,000 - $100,000+ | Applications critiques (guidage de missiles, aérospatiale, systèmes de défense de haute précision) |
Quelle est la fourchette de prix des IMU FOG ?
Gamme de prix des
centrales inertielles (IMU) à base de FOG
Le prix d'une centrale inertielle (IMU) à gyroscope à fibre optique (FOG) peut varier considérablement en fonction de l'application, des performances requises et des fonctionnalités supplémentaires. Les facteurs influençant le prix sont notamment :
- Spécifications de performance (ex. : précision, stabilité)
- Taille, poids et consommation d'énergie (SWaP-C)
- Protection de l'environnement (par exemple, renforcement pour les conditions difficiles)
- Personnalisation pour répondre aux besoins spécifiques de l'application
Pour obtenir des informations sur les prix des centrales inertielles MEMS, veuillez consulter notre dédiée aux centrales inertielles MEMS .
Guide de sélection des centrales inertielles
Comment choisir
une centrale inertielle ?
ÉTAPE 1
Définissez votre application
Quel est votre principal cas d'utilisation ? (par exemple : aérospatiale, défense, robotique, automobile, électronique grand public)
Quel niveau d'exactitude et de précision est requis ? (par exemple, inférieur au degré, haute précision)
ÉTAPE 2
Type d'IMU : MEMS ou à base de FOG
- MEMS : Abordables, compacts et idéaux pour une précision faible à moyenne.
- FOG : Haute précision, fiabilité et adaptation aux applications exigeantes.
ÉTAPE 3
Déterminer les exigences de précision
Choisissez le niveau de précision nécessaire (par exemple, degrés par heure pour les gyroscopes) en fonction de votre application.
ÉTAPE 4
Taille et poids
Assurez-vous que l'IMU soit compatible avec les contraintes d'espace et d'alimentation de votre système, notamment pour les drones ou les appareils portables.
ÉTAPE 5
Évaluer les conditions environnementales
Choisissez une centrale inertielle capable de résister aux facteurs environnementaux tels que les températures extrêmes, les chocs et les vibrations.
ÉTAPE 6
Options de personnalisation et d'intégration
Assurez-vous que l'IMU prend en charge les interfaces et les sorties de données appropriées pour une intégration transparente dans votre système.
Fabricant d'unités de mesure inertielle
Pourquoi choisir Guidenav ?
Approuvé par les acteurs clés
Nos systèmes de navigation inertielle de pointe sont utilisés par des organisations de premier plan dans les secteurs de l'aérospatiale, de la défense, du commerce et de l'industrie, dans plus de 25 pays. Notre réputation de fiabilité et de précision nous distingue.
Performances optimales
Nos produits offrent des performances de pointe et une excellente stabilité de polarisation. Conçue pour les applications les plus exigeantes, notre centrale inertielle à base de MEMS atteint une précision de polarisation de ≤ 0,1°/h.
Éprouvé en milieu difficile
Nos solutions sont conçues pour résister aux conditions extrêmes, offrant des performances constantes même dans les environnements les plus difficiles.
Excellentes performances en présence de vibrations
Notre technologie MEMS et FOG IMU excelle dans les environnements à fortes vibrations, garantissant précision et stabilité même dans les environnements opérationnels les plus difficiles.
Système PLUG & PLAY
Nos systèmes sont conçus pour une intégration facile, offrant des solutions prêtes à l'emploi qui simplifient l'installation et réduisent le temps de configuration, vous permettant ainsi de vous concentrer sur votre mission.
SANS ITAR
Nos produits sont exempts de la réglementation ITAR, ce qui vous permet de simplifier vos transactions internationales et de réduire les obstacles réglementaires. Choisissez GuideNav pour des opérations mondiales fluides.
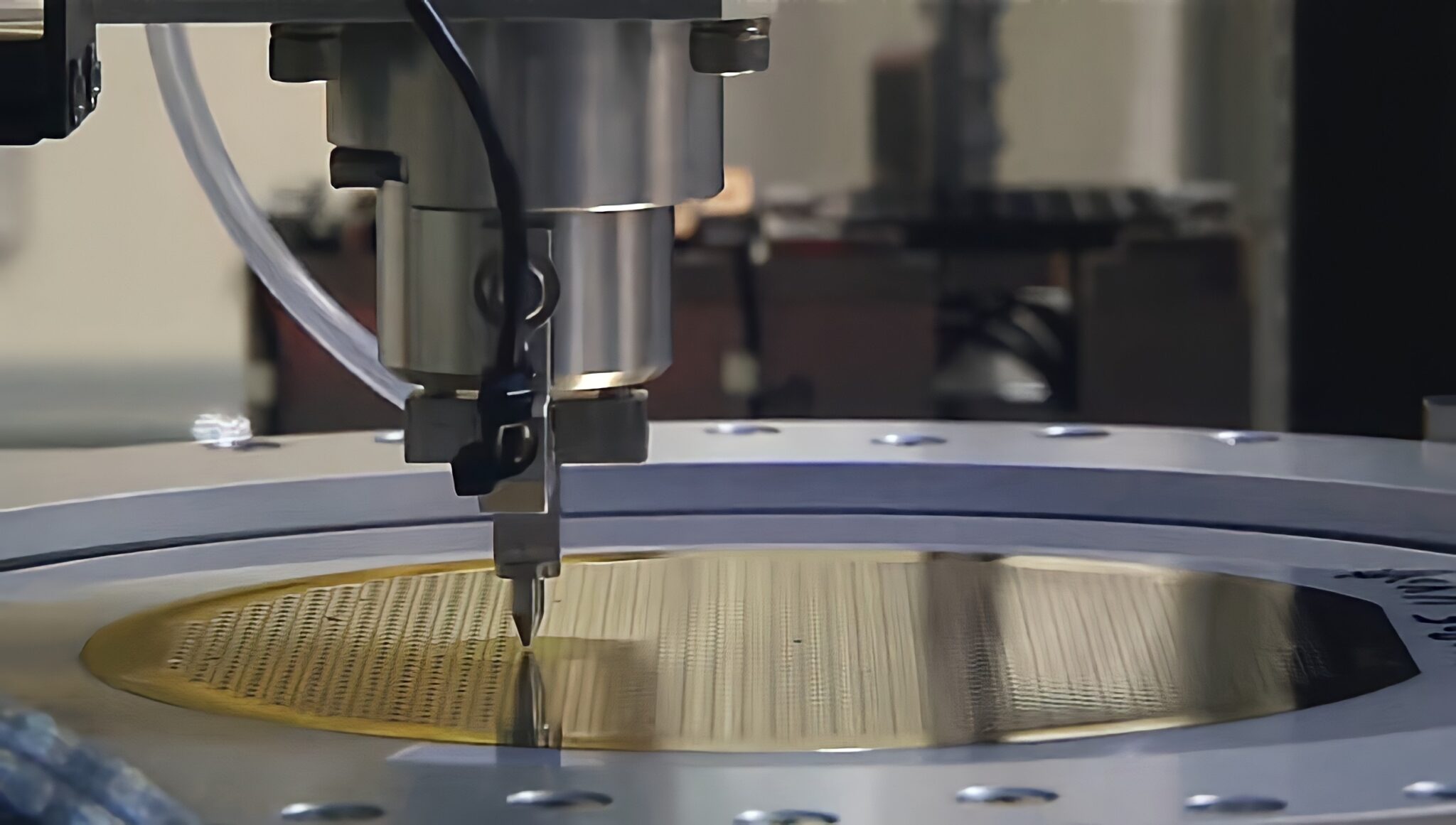
Notre usine - À voir absolument








Pourquoi nous choisir ?
Des solutions complètes pour tous vos besoins de navigation
Couverture de qualité commerciale
Stabilité du biais : >0,2°/h
Solution : Gyroscope/IMU/INS à base de MEMS
Applications : navigation automobile, véhicules aériens sans pilote, transport, robotique, etc.
Couverture de qualité tactique
Stabilité du biais : 0,05°/h-0,2°/h
Solution : Gyroscope/IMU/INS à base de fibres optiques et de MEMS
Applications : opérations de véhicules blindés, artillerie antiaérienne, ciblage de précision, etc.
Couverture de navigation par niveau
Stabilité du biais : ≤0,05°/h
Solution : Fibre optique et laser annulaire Gyroscope/IMU/INS
Applications : guidage à moyenne et longue portée, aviation militaire, satellites




FAQ Unité de mesure inertielle
Réponses à vos questions
Les principales fonctions d'une centrale inertielle sont de fournir en temps réel des informations d'orientation (telles que les angles de tangage, de roulis et de lacet) et de mouvement (telles que l'accélération linéaire et la vitesse angulaire). Ces données aident les systèmes comme les robots, les drones, les appareils mobiles ou les véhicules intelligents à naviguer, se positionner et se contrôler.
Le GPS fournit des informations de position géographique et de vitesse absolue grâce au positionnement par satellite, tandis qu'une centrale inertielle (IMU) s'appuie sur des mesures de capteurs internes pour fournir l'état de mouvement relatif et les changements d'orientation. Les IMU peuvent fonctionner sans signaux de positionnement externes, ce qui les rend particulièrement utiles dans les environnements où les signaux GPS sont indisponibles ou peu fiables (par exemple, à l'intérieur des bâtiments, dans les tunnels ou sous l'eau). En général, la combinaison des données IMU et GPS permet un positionnement et une navigation plus précis et plus fiables.
Les sorties typiques d'une centrale inertielle (IMU) comprennent :
- Données de l'accéléromètre triaxial (X, Y, Z)
- Données du gyroscope à trois axes (X, Y, Z)
- (Si équipé) Données du magnétomètre triaxial
- (Si équipé) Données de pression barométrique et d'altitude
Nous proposons deux principaux types d'IMU :
- Centrales inertielles MEMS : plus petites, plus légères et plus abordables, elles sont idéales pour les applications de précision moyenne. Nous proposons également des centrales inertielles MEMS haute précision offrant une précision jusqu’à 0,1°/h des gyroscopes à fibre optique d’entrée de gamme .
- Centrales inertielles FOG : Haute précision et stabilité, utilisées dans des applications exigeantes telles que l’aérospatiale, la défense et les systèmes de navigation haut de gamme.
Oui, les centrales inertielles de GuideNav sont parfaitement adaptées aux applications militaires . Conçues pour offrir une haute précision, une grande robustesse et une personnalisation optimale, nos centrales inertielles répondent aux exigences rigoureuses des opérations de défense sensibles, notamment les missions de reconnaissance, de surveillance et d'exploration sous-marines.
Oui, vous pouvez remplacer votre centrale inertielle actuelle par notre produit. Notre centrale inertielle est conçue pour être compatible avec une large gamme de systèmes et d'applications. Voici quelques points clés à prendre en compte :
Compatibilité : Notre centrale inertielle prend en charge les protocoles de communication standard (tels que SPI, I2C et UART) et offre des spécifications similaires, voire supérieures, à celles de la plupart des centrales inertielles existantes. Son intégration à votre système actuel devrait donc être simple.
Performances améliorées : Notre centrale inertielle offre une précision accrue, des niveaux de bruit réduits et une meilleure stabilité, ce qui peut améliorer les performances globales de votre application.
Fonctionnalités supplémentaires : Selon le modèle, nos IMU peuvent inclure des capteurs supplémentaires (comme des magnétomètres) et des capacités de traitement de données avancées, offrant des données de mouvement et d’orientation plus complètes.
Assistance et documentation : Nous fournissons une documentation détaillée et une assistance technique pour vous accompagner dans le processus de remplacement, garantissant une transition en douceur sans interruption de service significative.
Personnalisation : Si vous avez des exigences spécifiques, notre équipe peut travailler avec vous pour personnaliser les paramètres de l'IMU ou le micrologiciel afin de mieux répondre aux besoins de votre application.