Les capteurs inertiels sont, par nature, imparfaits. La dérive de biais, la marche aléatoire et la sensibilité thermique ne sont pas des anomalies, mais des comportements attendus. L'important n'est pas d'éliminer ces erreurs, mais de les gérer.
Au fil des années, j'ai appris qu'une navigation inertielle fiable ne dépend pas uniquement des spécifications des capteurs, mais aussi de la compréhension et de la compensation de leurs imperfections. Que vous utilisiez des MEMS ou des FOG, le succès dépend de ce qui se passe une fois que le capteur commence à transmettre des données.
de la navigation inertielle est finalement limitée par la qualité de la modélisation et de la compensation des erreurs des capteurs. De la dérive de biais à la marche aléatoire , une atténuation efficace nécessite une combinaison de conception matérielle, de routines d'étalonnage et de correction algorithmique en temps réel.
La navigation inertielle n'est pas uniquement limitée par le matériel. Les performances matérielles définissent le plancher, mais le plafond est déterminé par l'efficacité de la gestion des erreurs.
Table des matières
Pourquoi la compensation des erreurs est-elle le véritable goulot d’étranglement de l’INS ?
Les systèmes de navigation inertielle ne tombent généralement pas en panne subitement ; ils se dégradent silencieusement . Ce qui commence par un léger biais dans le gyroscope ou un léger décalage dans l'accéléromètre se transforme lentement en une erreur croissante d' attitude, de vitesse et de position . J'ai vu des systèmes de navigation inertielle passer d'une précision inférieure au mètre à inutilisable en quelques minutes , non pas à cause d'un défaut des capteurs, mais parce que l' erreur n'était pas gérée .
Quelle que soit la précision annoncée par votre IMU sur le papier, un INS non compensé dérivera toujours . Et dans les environnements sans GNSS , cette dérive devient critique. Une compensation efficace n'est pas un bonus, c'est la base d'un INS fiable .
Catégorisation des erreurs INS : ce que vous pouvez modéliser et ce que vous ne pouvez pas
Lorsque je travaille avec des systèmes de navigation inertielle, l'une des premières choses que j'observe est l'évolution des erreurs au fil du temps. Certaines sont prévisibles, d'autres non. Et cette différence est essentielle pour la compensation.
Erreurs systématiques : prévisibles et corrigibles
Ces phénomènes sont répétables dans le temps et à la température s'ils ne sont pas corrigés :
- Dérive de polarisation dans les gyroscopes et les accéléromètres
- Non-linéarité du facteur d'échelle
- Légers désalignements entre les axes des capteurs
- Sensibilité thermique qui décale la sortie en fonction de l'environnement
Avec une routine d’étalonnage solide, ces erreurs peuvent généralement être mesurées une fois et compensées de manière cohérente, à condition que vos conditions restent dans les limites.
Erreurs aléatoires : imprévisibles, mais caractérisables
Il existe ensuite des erreurs qui ne peuvent être supprimées, mais seulement modélisées. Parmi celles-ci :
- Marche aléatoire angulaire (ARW)
- Marche aléatoire de vitesse (VRW)
- Bruit blanc du capteur
- Artefacts induits par les vibrations, en particulier sur les plates-formes mobiles
À retenir : Les erreurs systématiques sont résolues en laboratoire. Les erreurs aléatoires sont combattues sur le terrain.
Comment les erreurs INS se propagent-elles au fil du temps ?
Avant d'aborder la compensation, il est essentiel de comprendre comment les erreurs se comportent réellement au sein d'un INS. Elles ne font pas qu'apparaître : elles se développent, s'accumulent et interagissent avec la dynamique du système de manières souvent sous-estimées. Analysons comment cela se déroule.
Les petites erreurs ne restent pas petites.
Dans un système de navigation inertielle, même un léger biais dans le gyroscope ou une erreur d'accélération d'un micro-g s'accentueront avec le temps. En effet, le système de navigation inertielle fonctionne par intégration des données des capteurs, ce qui signifie que toute erreur s'accumule à chaque étape.
L’intégration est un multiplicateur.
Une dérive d'orientation affecte la vitesse. Une erreur de vitesse affecte ensuite la position. Cette réaction en chaîne explique pourquoi un système apparemment performant sur le papier peut encore dériver de plusieurs centaines de mètres après 30 minutes de déni de signal GNSS.
Le profil de mouvement est important. Beaucoup.
La façon dont votre système évolue influence les erreurs dominantes. Sur les plateformes statiques, le biais à long terme et la dérive thermique prennent le dessus. Dans les systèmes hautement dynamiques, comme les drones, les missiles ou les rovers rapides, la non-linéarité du facteur d'échelle et le retard temporel deviennent plus critiques que le biais lui-même.
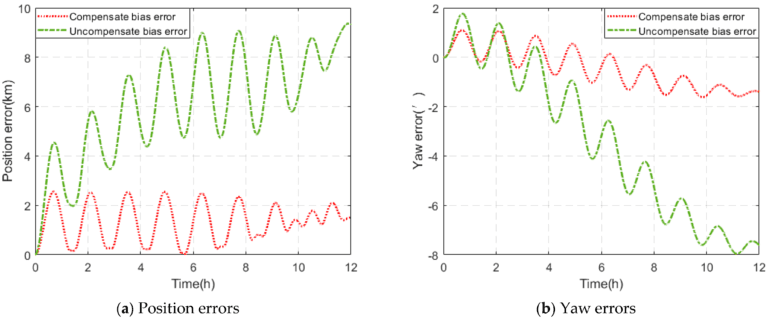
Les missions longues amplifient tout.
Qu'il s'agisse d'un itinéraire d'enquête de 12 heures ou d'un vol de missile de 2 minutes, plus votre INS fonctionne longtemps sans correction, plus votre modélisation des erreurs devient importante.
Modélisation des erreurs de capteur pour une compensation efficace
Avant de pouvoir corriger quoi que ce soit dans un INS, vous devez comprendre ce que vous corrigez. Le biais, la dérive et le bruit d'un capteur ne sont pas des bugs, mais des comportements. Et si vous ne les modélisez pas correctement, votre stratégie de compensation n'est qu'une hypothèse.
Je m'appuie généralement sur quatre méthodes de modélisation clés. Chacune cible différents types d'erreurs et, ensemble, elles vous donnent une image claire du comportement de votre système, non seulement en laboratoire, mais aussi sur le terrain.
| Méthode de modélisation | Objectif principal | Types d'erreurs traités | Pourquoi c'est important |
|---|---|---|---|
| Allan Variance | Analyser l'évolution du bruit du capteur au fil du temps | ARW, instabilité de biais, dérive aléatoire | Essentiel pour le réglage des filtres et l'étalonnage des capteurs |
| Étalonnage à six positions | Estimer les biais fixes et les désalignements | Biais, facteur d'échelle, désalignement des axes | Permet une suppression précise des erreurs statiques |
| Calibrage thermique | Variation de la sortie de la carte en fonction des températures | Biais induit par la température et dérive de gain | Essentiel pour les plateformes extérieures et mobiles du monde réel |
| Analyse PSD | Comprendre le bruit du capteur par fréquence | Bruit blanc, errance à basse fréquence | Informe la conception du filtre sans supprimer le mouvement réel |
Conseil : combinez au moins trois de ces méthodes avant de faire confiance à votre INS dans une mission de longue durée ou sans GNSS.
Techniques d'atténuation des erreurs basées sur le matériel
Un bon logiciel ne peut pas sauver un mauvais matériel. Dans les systèmes de navigation inertielle, les choix de conception mécanique, thermique et électrique affectent directement la stabilité à long terme . Ce sont les techniques fondamentales sur lesquelles je m'appuie pour construire des plateformes INS robustes.
- L’isolation des vibrations est essentielle.
Les vibrations mécaniques non filtrées génèrent de faux signaux de mouvement. L'utilisation d'isolateurs réglés ou de supports de capteur correctement amortis peut réduire considérablement le bruit haute fréquence, en particulier sur les véhicules à chenilles ou les giravions.
- La cohérence thermique maintient votre étalonnage valide.
La sortie du capteur varie avec la température. Une isolation passive ou un chauffage actif peuvent aider à maintenir la température de fonctionnement dans la plage d'étalonnage.
- Le bruit de puissance devient un bruit de signal.
Les ondulations de tension et les interférences électromagnétiques (EMI) provoquent une corruption subtile et persistante des signaux analogiques et numériques. J'utilise systématiquement des rails d'alimentation propres, des régulateurs à faible bruit et une séparation analogique/numérique stricte.
- La précision du montage affecte l'alignement.
Même de minuscules variations mécaniques peuvent entraîner des erreurs importantes d'attitude et de vitesse. Utilisez des supports usinés rigides et contrôlez soigneusement l'orientation et le couple de l'IMU.
- Utilisez des capteurs adaptés à la mission.
Ne vous contentez pas de choisir le « meilleur » capteur : choisissez-en un qui corresponde à votre tolérance d'erreur. Pour les pannes GNSS prolongées, la stabilité du biais est primordiale. Pour les plateformes rapides, un faible ARW et une bande passante faible sont prioritaires.
En résumé : les meilleures performances inertielles commencent bien avant la collecte des données : elles commencent par la manière dont vous boulonnez le capteur au châssis.
Techniques de rémunération basées sur des logiciels
Une fois le matériel stable, le logiciel prend le relais. C'est là que se déroule l'essentiel du contrôle de la dérive , et aussi qu'un bon modèle peut transformer un capteur modeste en un excellent capteur. Voici mon approche pratique :
- Commencez par un calibrage approprié.
Utilisez des procédures statiques et dynamiques pour mesurer le biais, le facteur d'échelle, le désalignement et la réponse en température. Sans une bonne base d'étalonnage, tout le reste n'est que conjecture.
- Utilisez des filtres qui correspondent à votre dynamique.
Filtres de Kalman étendus (EKF), filtres de Kalman non parfumés (UKF) ou filtres complémentaires : choisissez en fonction de votre profil de mouvement et des sources d'aide disponibles. Une mauvaise structure de filtre est pire que l'absence de filtre.
- La compensation de température n’est pas négociable.
Que vous utilisiez une IMU FOG ou MEMS, le comportement du capteur varie avec la température. Une correction en temps réel à l'aide de capteurs de température internes ou externes peut réduire la dérive d'un ordre de grandeur.
- Le filtrage adaptatif améliore la capacité de survie.
Lors de missions multi-phases (par exemple, lancement, croisière, descente), les caractéristiques du bruit des capteurs varient. Le réglage adaptatif du filtre, basé sur la vitesse, les vibrations ou les données environnementales, permet à votre système de s'adapter selon les besoins.
- La correction en boucle fermée maintient les choses limitées.
Utilisez les mises à jour GNSS, odométrie, baromètre ou magnétomètre pour limiter la croissance des erreurs. Même une correction à faible fréquence toutes les quelques secondes améliore considérablement les performances des tâches de longue durée.
L'essentiel : un logiciel ne peut pas inventer la précision, mais il peut la protéger , l'optimiser et la restaurer en cas de problème. Et c'est précisément ce que doit faire un bon INS.
Le rôle de la fusion de capteurs dans la suppression de la dérive INS
Même le meilleur système de navigation inertielle dérivera ; ce n'est pas un défaut, c'est une question de physique . La véritable question est de savoir comment limiter cette dérive à l'aide d'autres capteurs. C'est là que la fusion de capteurs devient l'outil le plus puissant du système.
GNSS + INS : la solution classique
Lorsque le GNSS est disponible, même par intermittence, il fournit des mises à jour de position absolue pour limiter la dérive de l'INS.
Idéal pour : missions de longue durée, cartographie mobile, drones
Avantage : corrections précises, filtres matures (EKF)
Mise en garde : vulnérable au brouillage, à la perte de signal et aux trajets multiples
Hybride FOG + MEMS : équilibre entre précision et coût
La combinaison d'un FOG stable avec un MEMS réactif vous offre le meilleur des deux mondes : une faible dérive et une réaction rapide.
Idéal pour : drones de taille moyenne, plateformes navales, systèmes robotiques
Avantage : meilleur ARW + SWaP plus faible
Mise en garde : nécessite une intégration et un étalonnage croisé minutieux
Vision / LiDAR + INS : continuité sans GNSS
L'odométrie visuelle ou LiDAR SLAM peut fournir des données de pose relative lorsque le GNSS n'est pas disponible, comme à l'intérieur ou sous terre.
Idéal pour : véhicules autonomes, tunnels, entrepôts, mines
Avantage : entièrement autonome
Mise en garde : ligne de visée nécessaire, sensible à l'éclairage ou à la densité des éléments
Le timing est primordial. Fusion ne fonctionne que si vos capteurs sont synchronisés. Des horodatages mal alignés sont plus néfastes que bénéfiques.
En pratique : Fusion ne consiste pas à ajouter des capteurs supplémentaires, mais à savoir à qui faire confiance au bon moment.
L'approche de GuideNav en matière de fiabilité de l'INS
Après tout ce que j'ai vu sur le terrain (drones, véhicules d'enquête, systèmes marins), une chose reste vraie : les performances réelles d'un INS proviennent de tout ce qui entoure le capteur .
Chez GuideNav, c'est exactement là que nous nous concentrons.
- Chaque unité est entièrement calibrée en termes de température et d'axes , et pas seulement testée par lots.
- Nous fournissons de véritables données de variance Allan et une assistance pour le réglage des filtres, et pas seulement des fiches techniques.
- Nos modèles FOG et MEMS sont livrés avec des outils d'intégration prêts à l'emploi : synchronisation stable, interfaces propres et prise en charge de la fusion.
- Et parce que nous sommes exempts d'ITAR , nos systèmes sont prêts à être déployés à l'échelle mondiale dans le cadre de programmes de défense, industriels ou de recherche.
Vous n’obtenez pas seulement un capteur, vous obtenez une plateforme de navigation à laquelle vous pouvez faire confiance lorsque d’autres systèmes tombent en panne.