Avez-vous déjà essayé d'intégrer un système de navigation, seulement pour réaliser qu'il ne donne pas de position du tout?
Cela se produit lorsque les gens confondent un IMU avec un INS. Cela semble technique, mais les conséquences sont réelles: les mauvais choix matériels, le budget gaspillé et les systèmes qui ne fonctionnent tout simplement pas comme prévu. Le correctif? Comprendre les principales différences entre IMU, Ins et ce que chacun est réellement conçu pour faire. Ce guide vous guidera à travers, le tout en anglais simple.
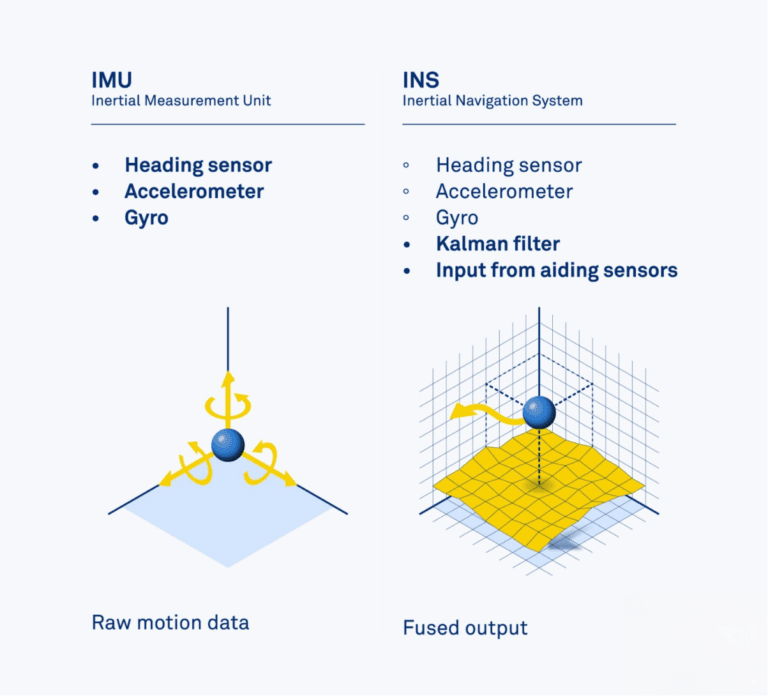
Un IMU mesure le mouvement, alors qu'un IS utilise des données IMU pour calculer la position et l'orientation au fil du temps - IMU est un capteur, Ins est un système.
Nettoyons la confusion - pas par étape.
Table des matières

Qu'est-ce qu'un IMU?
Une unité de mesure inertielle (IMU) est un dispositif de capteur qui mesure l'accélération et la vitesse angulaire . Typiquement construit avec des technologies MEMS, FOG ou HRG, un IMU comprend des accéléromètres, des gyroscopes et parfois des magnétomètres . Il fournit des données inertiales brutes utilisées pour estimer le mouvement dans l'espace. Les IMU sont largement utilisés dans les drones, la robotique, les véhicules et les smartphones. Cependant, seuls, ils ne fournissent pas de position ou d'orientation , sauf s'ils sont intégrés à un traitement supplémentaire. L'IMU varie en précision, des capteurs de qualité commerciale à faible coût aux capteurs tactiques et à niveau navigant comme GMS400 de GuideAV.

Qu'est-ce qu'un INS?
Un système de navigation inertielle (INS) est un système complet qui utilise les données IMU pour calculer la position, la vitesse et l'attitude en temps réel. Il comprend généralement:
- Un IMU intégré
- Un puissant processeur embarqué
- Algorithmes de fusion de capteurs (par exemple, filtre Kalman )
- Souvent, un module GNSS pour aider
L'INS effectue une intégration en temps réel des sorties IMU pour fournir une solution de navigation continue. Pour cette raison, il peut fonctionner même dans des environnements à prières GNSS pendant une durée limitée, ce qui le rend essentiel dans les missions aérospatiales, maritimes et autonomes . Des systèmes tels que GFS120 et Guide2d de GuideNAV illustrent une telle intégration.
En quoi IMUS et INSS sont-ils différents?
La plupart des gens le simplifient en disant: "Un INS est juste un IMU avec un module GNSS." Techniquement, c'est un début - mais c'est loin de toute l'image.
Oui, un INS comprend un IMU à la base. Mais il intègre également un processeur, GNSS (souvent avec le support RTK ou SBAS), et parfois des capteurs d'aide externes comme les encodeurs de roue, les capteurs de vitesse, les altimètres barométriques ou les journaux de vitesse Doppler (DVL) . Ces ajouts permettent aux IS de fusionner les données en temps réel, offrant non seulement un mouvement, mais des estimations de confiance élevées de la position, de la vitesse et de l'orientation.
Considérez un IMU comme un thermomètre - il vous indique les données brutes. L'INS est le rapport météo: filtré, fusionné et prêt à agir.
| Fonctionnalité | IMU | INS |
|---|---|---|
| Fonction de base | Mesure l'accélération et la rotation | Calcule la position complète, la vitesse, l'orientation |
| Composants | Accéléromètre, gyroscope | IMU + GNSS + Processeur + capteurs facultatifs |
| Sortir | Données de mouvement brutes | Données de navigation fusionnées (en temps réel) |
| Support GNSS | Aucun | Intégré (RTK / SBAS en option) |
| Aide externe | Non applicable | Odomètre, DVL, vitesse, altimètre, etc. |
Pouvez-vous naviguer avec juste un IMU?
Pensez à un IMU comme un mouvement avec vos yeux fermés. Vous pouvez dire que vous avancez ou que vous avancez, mais vous ne savez pas où vous êtes. C'est ce qui se passe lorsque vous essayez de naviguer en utilisant uniquement un IMU.
Bien sûr, vous pouvez intégrer l'accélération au fil du temps pour estimer la position. Mais de minuscules erreurs s'accumulent rapidement, se transformant en énormes erreurs en quelques secondes. C'est ce qu'on appelle la dérive, et cela rend les imus autonomes peu fiables pour la navigation.
Ils sont parfaits pour la stabilisation à court terme - comme garder un niveau de cardan - mais pas pour déterminer où vous êtes ou où vous allez. Pour cela, vous avez besoin d'un INS.
Comment un INP processus IMU Données?
Contrairement à un IMU, qui ne détecte que Motion, un IN interprète ce mouvement et le transforme en un aperçu de la navigation complet. Cela comprend savoir où vous êtes, à quelle vitesse vous vous déplacez et dans quelle direction vous êtes confronté. Mais cela ne se produit pas automatiquement. Il nécessite une chaîne d'étapes soigneusement conçues - combinant la physique, les mathématiques et la correction en temps réel - pour transformer les signaux bruts en navigation fiable.
Parcouchons le processus:
1. Sense Motion (entrée IMU)
Tout commence par l'IMU, qui mesure continuellement l'accélération (via les accéléromètres) et le taux angulaire (via les gyroscopes). Ces valeurs reflètent la façon dont le système se déplace dans l'espace 3D.
➡ Cette étape donne aux INS sa conscience de mouvement brut.
2. Calculer la vitesse et la position
L'INS intègre l'accélération pour obtenir la vitesse, puis intègre la vitesse pour estimer la position dans le temps. Cela indique au système jusqu'où il a parcouru son point de départ.
➡ C'est ainsi que l'INS suit le mouvement, même sans GPS.
3. Estimer l'orientation
En traitant les données du gyroscope et en référençant des vecteurs comme la gravité et le champ magnétique de la Terre, l'INS détermine le rouleau, la hauteur et le lacet - votre orientation 3D complète.
➡ Cette étape aide le système à comprendre comment il est tourné ou incliné.
4. Appliquer la fusion du capteur pour la précision
Les données IMU se dérivent seule au fil du temps. L'INS utilise des algorithmes intelligents - comme les filtres Kalman - pour combiner l'entrée IMU avec d'autres capteurs:
- GNSS / RTK / SBAS
- Odomètres de roue
- Capteurs DVL ou de vitesse
- Altimètres barométriques
Ces corrections améliorent considérablement la précision et la stabilité à long terme.
➡ La fusion maintient le système fiable, même lorsque certains capteurs perdent le signal.
5. Offrir une sortie de navigation en temps réel
La sortie finale est un flux continu en temps réel de position de position, de vitesse et d'attitude - refrété plusieurs fois par seconde, et prêt à l'emploi par les contrôleurs de vol, les pilotes automatique ou les systèmes de cartographie.
➡ C'est ce qui fait de l'INS une solution de navigation complète.
Les produits INS de GuideNAV suivent cette architecture - avec des moteurs de fusion réglés pour les conditions, les environnements dynamiques et les plates-formes dynamiques à forte vibration. Le résultat: navigation fiable à laquelle vous pouvez faire confiance lorsqu'elle est le plus importante.
Quand un IMU est-il suffisant pour votre application?
Un IMU est tout ce dont vous avez besoin si votre système a juste besoin pour ressentir le mouvement , pas de calculer la position ou de vous diriger au fil du temps. C'est idéal lorsque vous réagissez au mouvement, n'essayez pas de suivre l'emplacement absolu.
Les cas d'utilisation courants comprennent:
Stabilisation de la caméra
Détecte les vibrations ou l'inclinaison pour aider les moteurs à maintenir la caméra stable.
Suivi des gestes
En AR / VR ou portables, où vous suivez le mouvement, pas une position exacte.
Orientation à court terme
Utilisé dans les drones ou les robots pendant le démarrage, le plan de planage ou les manœuvres rapides.
Support de contrôle de vol
Associé à GNSS ou à l'écoulement optique, les IMU fournissent une rétroaction rapide pour la stabilisation du drone.
Gardez à l'esprit: IMUS ne donne que une accélération et une rotation brutes. Si vous avez besoin d'orientation ou de vitesse, vous devrez construire le calcul vous-même - filtre, correction de dérive, etc.
Si cela fait partie de la capacité de votre système, un IMU est une solution légère, abordable et efficace
Quand avez-vous vraiment besoin d'un INS complet?
Vous avez besoin d'un INS complet lorsque votre système doit connaître la position et l'orientation exactes à tout moment , en particulier dans les environnements où GNSS peut échouer ou n'est pas disponible.
Les cas d'utilisation typiques comprennent:
- Environnements soumises à GNSS: comme les tunnels, à l'intérieur, sous-marin ou canyons urbains
- Plate-formes élevées: tels que les drones, les missiles et les véhicules tout-terrain qui ont besoin de mises à jour rapides et précises
- Rappel mort: lorsque le système doit maintenir la navigation entre les signaux GNSS - ou sans GNSS du tout
- Tâches critiques de précision: telles que la cartographie, le ciblage ou la conduite autonome
Dans ces situations, un IMU à lui seul dériverait rapidement, conduisant à des résultats peu fiables. Un INS résout cela en fusionnant des données inertiales avec GNSS et des capteurs facultatifs comme DVL, Odomètres ou altimètres.
Quelles sont les erreurs courantes dans le choix de l'IMU ou de l'INS?
Soyons honnêtes - quand il s'agit de capteurs inertiels, il est facile de passer le mauvais appel, surtout si vous êtes nouveau sur le terrain. J'ai vu des équipes choisir le mauvais outil plus de fois que je ne peux en compter. Et il s'agit rarement de la technologie - il s'agit de mal comprendre le problème.

Voici où les choses sortent habituellement:
Erreur # 1: Penser qu'un IMU vous donne une position
Ce n'est pas le cas. Un IMU vous dit seulement à quelle vitesse vous bougez ou tournez. Si vous espérez des coordonnées en temps réel hors de la boîte, vous serez déçu.
Erreur n ° 2: Utilisation d'un IMU d'entrée de gamme pour un travail exigeant
Un capteur à faible coût peut être bien sur le papier, mais une fois que vous l'attachez à un drone ou un robot à évolution rapide, le bruit et la dérive ruineront vos données.
Erreur n ° 3: payer pour un INS lorsqu'un IMU aurait fait l'affaire
Si tout ce dont vous avez besoin est de stabiliser une caméra ou de détecter l'orientation de base, un INS complet est exagéré. Ne résolvez pas un problème de 300 $ avec une solution de 3000 $.
Erreur n ° 4: oublier l'environnement du monde réel
Les spécifications de laboratoire ne reflètent pas toujours les performances sur le terrain. Des vibrations élevées, des températures extrêmes ou des charges de choc peuvent rottir rapidement des capteurs bon marché.
Erreur n ° 5: sous-estimation des efforts d'intégration
Les données IMU brutes ne sont pas plug-and-play. Si vous n'avez pas les bons logiciels, filtres ou algorithmes en place, même le meilleur capteur sera sous-traité.
Quel support offre GuidenAV pour la sélection IMU / INS?
Chez GuidenAV, nous ne faisons pas que des capteurs d'expédition - nous vous aidons à construire le bon système . Nous proposons:
- Conseil d'applications individuelles
- Correspondance des performances IMU / ins
- Guides d'intégration pour les drones, les UGV et les systèmes maritimes
- Kits d'accès et d'évaluation des fiches techniques
- Support d'ingénierie de réponse rapide
Que vous construisiez un UAV à faible puissance ou un système de navigation déni de GNSS, nous vous aidons à sélectionner entre MEMS IMU, FOG IMU ou compléter les Ins en fonction de votre profil de mission.