
Notre unité de mesure inertielle basée sur la technologie MEMS
Unité de mesure inertielle MEMS
Plus de 15 000 systèmes en service dans plus de 35 pays
Des solutions sur mesure plébiscitées par les acteurs clés mondiaux
L'unité de mesure inertielle (IMU) MEMS de GuideNav représente le summum de la précision et de la fiabilité. Conçues pour offrir des performances exceptionnelles, nos IMU fournissent des mesures précises de la vitesse angulaire et de l'accélération linéaire, essentielles pour les systèmes de navigation et de contrôle dans les secteurs de l'aérospatiale, de la défense et de l'industrie.
Unité de mesure inertielle MEMS vedette de Guidenav
MODÈLES D'IMU MEMS DE HAUTE PRÉCISION
GuideNav, fabricant leader d'IMU MEMS, propose une gamme complète d'unités de mesure inertielle MEMS de haute précision, conçues pour répondre aux besoins variés de différents secteurs, de l'aérospatiale et la défense à l'automatisation industrielle et la robotique. Nos solutions incluent des IMU standard et sur mesure, adaptées à vos exigences spécifiques.
Nous proposons également des solutions de remplacement transparentes pour vos systèmes existants, garantissant la compatibilité avec vos interfaces actuelles sans aucun problème d'intégration. Contactez nos experts pour découvrir les spécifications détaillées et les solutions personnalisées pour vos projets.
- rentable
- Plage de vitesse du gyroscope : ± 500 °/s
- Instabilité de polarisation : ≤ 2 °/h
- Stabilité du biais : ≤ 10°/h
- Poids : ≤ 10 g
- Protocole : UART

- Intuitionneur MEMS à 10 axes
- Plage de vitesse du gyroscope : ± 450 °/s
- Instabilité de biais : ≤ 2°/h
- Stabilité du biais : ≤ 4°/h
- Poids : ≤ 40 g
- Protocole : SPI
- Intuitionneur MEMS à 10 axes
- Plage de vitesse du gyroscope : ± 450 °/s
- Instabilité de biais : ≤ 0,8 °/h
- Stabilité du biais : ≤ 3°/h
- Poids : ≤ 40 g
- Protocole : SPI

- Précision moyenne à élevée
- Plage de vitesse du gyroscope : ± 320 °/s
- Instabilité de biais : ≤ 0,4 °/h
- Stabilité du biais : ≤ 2°/h
- Poids : ≤ 10 g
- Protocole : RS422

- Large gamme de gyroscopes
- Plage de vitesse du gyroscope : ± 2000 °/s
- Instabilité de polarisation : ≤ 3 °/h
- Stabilité du biais : ≤ 10°/h
- Poids : ≤ 30 g
- Protocole : UART

- GUN-HARD jusqu'à 20 000 g
- Plage de vitesse du gyroscope : jusqu'à 6000 °/s
- Instabilité de biais : ≤ 3°/h
- Stabilité du biais : ≤ 10°/h
- Poids : ≤ 50 g
- Protocole : UART

- Haute précision
- Plage de vitesse du gyroscope : ± 450 °/s
- Instabilité de biais : ≤ 0,2 °/h
- Stabilité du biais : ≤ 1°/h
- Poids : ≤ 40 g
- Protocole : RS422

- Ultra-haute précision
- Plage de vitesse du gyroscope : ± 400 °/s
- Instabilité de biais : ≤ 0,1 °/h
- Stabilité du biais : ≤ 0,5°/h
- Poids : ≤ 55 g
- Protocole : RS422
Obtenez votre solution personnalisée dès maintenant
Votre projet mérite une solution parfaitement adaptée à vos spécifications. Afin de vous fournir les centrales inertielles (IMU) les plus performantes, nous vous invitons à nous communiquer les paramètres et exigences de performance spécifiques à vos applications. Qu'il s'agisse de précision, de stabilité ou de contraintes d'encombrement, notre équipe est à votre disposition pour vous aider à trouver la solution idéale.
Table des matières
Télécharger cette page au format PDF
Pour vous faire gagner du temps, nous avons également préparé une version PDF contenant l'intégralité du contenu de cette page ; il vous suffit de laisser votre adresse e-mail et vous recevrez immédiatement le lien de téléchargement.

Présentation de l'unité de mesure inertielle (IMU)
Qu'est-ce qu'une unité de mesure inertielle (IMU) ?
Une centrale inertielle (IMU) est un système de capteurs avancé qui suit avec précision le mouvement et l'orientation d'un objet dans l'espace tridimensionnel. Elle combine plusieurs capteurs, généralement des accéléromètres et des gyroscopes, pour mesurer respectivement l'accélération linéaire et la vitesse angulaire. Dans certaines configurations, des magnétomètres sont également intégrés afin de fournir des données d'orientation supplémentaires par rapport au champ magnétique terrestre.
Les centrales inertielles (IMU) jouent un rôle crucial dans les systèmes de navigation et de contrôle de nombreux secteurs à enjeux élevés, tels que l'aérospatiale, la défense et les systèmes autonomes. En fournissant des données en temps réel et de haute précision sur la position, la vitesse et l'orientation, les IMU garantissent la stabilité et la précision des systèmes complexes en conditions dynamiques, assurant ainsi un fonctionnement fiable même dans des environnements soumis à de fortes vibrations, des chocs ou d'autres perturbations.
EXPLOREZ l'unité de mesure inertielle MEMS (MEMS IMU)
Comment fonctionne une centrale inertielle MEMS ?
Une centrale inertielle MEMS (IMU) fonctionne en intégrant plusieurs capteurs, généralement des accéléromètres et des gyroscopes MEMS, pour mesurer le mouvement et l'orientation. L' accéléromètre détecte l'accélération linéaire sur trois axes, tandis que le gyroscope mesure le mouvement de rotation autour de ces axes. Ces capteurs collectent des données sur la position, la vitesse et l'orientation de l'objet, qui sont ensuite traitées pour fournir des informations précises de navigation et de contrôle en temps réel. Les centrales inertielles MEMS sont compactes, économes en énergie et très précises, ce qui les rend idéales pour les applications dans les domaines de l'aérospatiale, de la défense, de la robotique et des systèmes autonomes.
Centrale inertielle vs Gyroscope (uniquement)
Pourquoi utiliser une centrale inertielle MEMS complexe plutôt qu'un simple gyroscope ?
Bien qu'un gyroscope mesure la vitesse angulaire, il subit une dérive au fil du temps et ne peut fournir ni position ni orientation absolues. Une centrale inertielle (IMU) intègre des accéléromètres et des magnétomètres au gyroscope pour corriger cette dérive, fournir une orientation initiale et transmettre des données de mouvement 3D complètes, garantissant ainsi une mesure d'attitude précise et fiable dans le temps.
Correction de la dérive : Les gyroscopes seuls subissent une dérive au fil du temps. Une centrale inertielle (IMU) intègre des accéléromètres et des magnétomètres pour corriger cette dérive et maintenir la précision.
Orientation initiale : Un gyroscope ne peut pas fournir l'orientation initiale, mais une centrale inertielle le peut, en utilisant des accéléromètres pour détecter la gravité et des magnétomètres pour le cap.
Données de mouvement 3D complètes : les IMU mesurent non seulement la rotation, mais aussi l’accélération linéaire, offrant une image complète du mouvement en trois dimensions.
Précision accrue : En combinant les données de plusieurs capteurs, une centrale inertielle (IMU) fournit des mesures d'attitude plus précises et plus fiables, notamment sur de longues périodes.


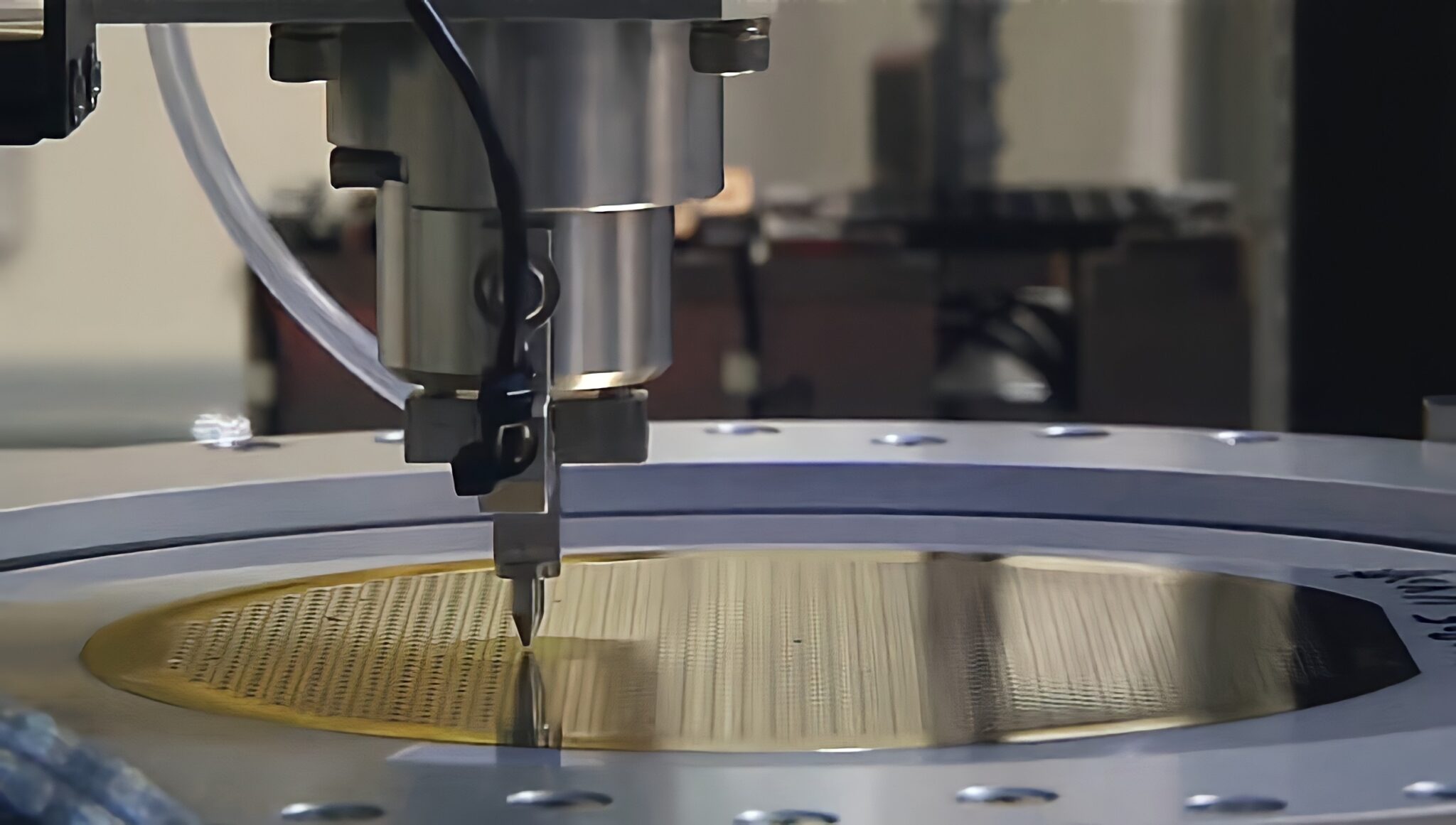
Processus de fabrication d'une centrale inertielle MEMS
Processus de fabrication des centrales inertielles MEMS
01
ÉTAPE 1 : Personnalisation client et définition des paramètres
Définir les paramètres clés tels que la vitesse de dérive, la densité de bruit, la dérive thermique et la linéarité en fonction des exigences spécifiques de l'application du client. S'assurer que ces paramètres répondent aux exigences de précision, de stabilité et d'adaptabilité environnementale. Concevoir et fabriquer les capteurs MEMS, notamment les accéléromètres et les gyroscopes, et les intégrer dans un module unique.
02
STPE 2 : Conception et intégration de circuits
Concevoir et intégrer les circuits de traitement du signal du capteur, notamment l'amplification, le filtrage et la conversion analogique-numérique. Ces fonctions sont généralement intégrées dans un circuit intégré spécifique (ASIC) ou un microcontrôleur pour une intégration de haut niveau.
03
STPE 3 : Étalonnage automatisé
Effectuez l'étalonnage du point zéro, les tests dynamiques et la compensation de température sur les accéléromètres et les gyroscopes à l'aide d'une plateforme de test automatisée afin de garantir la précision et la stabilité des capteurs.
04
STPE 4 : Emballage et tests
Intégrez de manière compacte les puces et les circuits MEMS et effectuez des tests d'adaptabilité environnementale, tels que des tests de température, de vibration et de choc, afin de garantir la fiabilité et les performances de l'IMU dans diverses conditions.


EXPLOREZ l'unité de mesure inertielle MEMS (MEMS IMU)
L'IMU MEMS est-elle synonyme de « faible précision » ?
Pas nécessairement. Alors que les IMU MEMS standard sont généralement associées à une précision modérée, les IMU MEMS tactiques de haute précision peuvent atteindre une instabilité de biais aussi faible que 0,1°/h (GUIDE900) , un niveau comparable aux IMU à gyroscope à fibre optique (FOG) d'entrée de gamme.
- Centrales inertielles MEMS standard : Elles sont économiques et conviennent aux applications où une précision modérée est suffisante, telles que l’électronique grand public, l’automatisation industrielle et les drones.
- Centrales inertielles MEMS de haute précision : Grâce à des procédés de conception et de fabrication améliorés, certaines centrales inertielles MEMS de pointe répondent désormais aux exigences de précision des militaires et aérospatiales. Elles offrent des performances fiables pour les systèmes de navigation, les drones et même les systèmes de défense guidés.
Il est toutefois important de noter que même les IMU MEMS de haute précision présentent des limitations en matière de dérive à long terme et de stabilité ultra-élevée par rapport aux IMU FOG, qui sont mieux adaptées aux applications critiques nécessitant la dérive la plus faible possible et la plus grande précision.


MEMS IMU VS FOG IMU : Laquelle est la meilleure ?
(FOG IMU ) : Elle demeure la solution de choix pour les applications de haute précision, notamment lorsque la stabilité à long terme est essentielle, comme dans les secteurs de l’aérospatiale, de la navigation de précision et de la défense. Malgré leur taille plus importante et leur coût plus élevé, à gyroscope à fibre optique offrent des performances exceptionnelles dans des conditions environnementales extrêmes.
Centrales inertielles MEMS : Grâce aux progrès technologiques, les centrales inertielles MEMS ont atteint des niveaux de précision comparables à ceux des gyroscopes FOG de milieu de gamme dans de nombreux cas et sont largement utilisées dans les domaines militaires et civils de haute précision. Leurs atouts résident dans leur miniaturisation, leur faible consommation d’énergie et leur polyvalence.
| Fonctionnalité | IMU FOG | MEMS IMU |
|---|---|---|
| Principe de fonctionnement | Mesure la vitesse angulaire basée sur l'effet Sagnac dans les interférences de fibres optiques | Mesure l'accélération et la vitesse angulaire grâce à des structures micromécaniques issues de la technologie MEMS |
| Précision | Haute précision, idéale pour les applications de navigation et de contrôle exigeantes, notamment en termes de stabilité à long terme | Large gamme de précision ; certaines centrales inertielles MEMS haut de gamme ont atteint une précision comparable à celle des gyroscopes FOG de milieu de gamme, convenant à diverses applications, y compris dans des contextes militaires |
| Taux de dérive | Elle présente généralement un taux de dérive très faible, ce qui la rend adaptée à un fonctionnement continu à long terme | Le taux de dérive s'est considérablement amélioré grâce aux progrès technologiques ; certains modèles haut de gamme peuvent rivaliser avec les centrales inertielles FOG |
| Taille et poids | Plus grand et plus lourd, il convient aux applications de haute précision où l'espace et le poids ne sont pas des contraintes | Compact et léger, idéal pour les applications à espace restreint, largement utilisé dans les appareils portables et les applications militaires |
| Consommation d'énergie | Consommation électrique plus élevée, adaptée aux systèmes où les besoins en énergie ne constituent pas un problème majeur | Faible consommation d'énergie, idéale pour les appareils portables alimentés par batterie et les missions de longue durée |
| Coût | Coût de production plus élevé, adapté aux applications haut de gamme | Son coût varie de faible à moyen, convenant aux applications grand public, industrielles et militaires à grande échelle |
| Résistance aux interférences | Insensible aux interférences électromagnétiques, idéal pour les environnements électromagnétiques complexes | La résistance aux interférences s'est améliorée grâce aux progrès réalisés en matière de conception et de conditionnement ; la plupart des centrales inertielles MEMS offrent désormais une bonne résistance aux interférences électromagnétiques |
| Stabilité thermique | Excellente stabilité thermique, adaptée aux environnements extrêmes | Grâce aux techniques de compensation de température, de nombreuses centrales inertielles MEMS haut de gamme fonctionnent de manière stable sur une large plage de températures |
| Applications | Navigation de haute précision, aérospatiale, marine, défense et autres applications de pointe | Largement utilisé dans l'électronique grand public, les drones, les équipements militaires, l'automatisation industrielle, l'électronique automobile, et bien plus encore |
Prix des unités de mesure inertielle MEMS
Quelle est la fourchette de prix des centrales inertielles MEMS ?
Le prix des centrales inertielles (IMU) à base de MEMS est principalement déterminé par la précision du gyroscope (mesurée en degrés par heure, °/h), qui indique la précision avec laquelle l'unité mesure la vitesse angulaire. Plus la précision est élevée, plus le coût est important. Voici un aperçu des prix typiques en fonction des niveaux de précision.
Veuillez noter que ces fourchettes de prix sont données à titre indicatif uniquement . Le coût réel d'une centrale inertielle MEMS peut varier en fonction de facteurs tels que la personnalisation et les fonctionnalités supplémentaires.
| Plage de précision (°/h) | Fourchette de prix (par unité) | Applications typiques |
|---|---|---|
| Faible précision (1°/h - 10°/h) | $20 - $1,000 | Électronique grand public, objets connectés, détection de mouvement de base |
| Précision moyenne (0,5°/h - 1°/h) | $1,000 - $5,000 | Drones, robotique, automatisation industrielle, systèmes de navigation |
| Haute précision (0,1°/h - 0,5°/h) | $5,000 - $15,000 | Aérospatiale, navigation automobile, défense, robotique de pointe |
Un guide étape par étape pour vous aider à trouver le bon imu
Comment sélectionner/personnaliser la
centrale inertielle MEMS (IMU)
ÉTAPE 1
Définir les exigences de l'application
Collaborez avec l'équipe d'ingénierie de GuideNav pour identifier les scénarios d'application spécifiques et les besoins de performance, tels que la précision, le taux de dérive, les conditions environnementales et les contraintes de taille.
ÉTAPE 2
Évaluer les spécifications de performance
Des paramètres clés tels que l'instabilité de biais, la marche aléatoire angulaire (ARW) et la plage dynamique sont essentiels. Les centrales inertielles MEMS de haute précision peuvent atteindre une instabilité de biais de 0,1°/h , ce qui convient aux applications exigeantes comme les systèmes de navigation et de guidage.
ÉTAPE 3
Évaluer la robustesse environnementale
Il convient de tenir compte des conditions de fonctionnement. Les applications militaires et industrielles nécessitent des centrales inertielles capables de résister à des chocs, des vibrations et des températures extrêmes, tandis que les systèmes commerciaux peuvent avoir des exigences moins strictes.
ÉTAPE 4
Options de personnalisation
Nous proposons des options de personnalisation pour l'IMU, notamment des configurations de capteurs spécifiques, des matériaux de boîtier et des types d'interface adaptés à vos besoins uniques.
ÉTAPE 5
Prototype et validation
Développer un prototype basé sur les spécifications sélectionnées et effectuer des tests rigoureux pour valider que l'IMU répond à tous les critères de performance et aux exigences de l'application.
ÉTAPE 6
Intégration et compatibilité
Après validation, nous finalisons la configuration de l'IMU et vous assistons dans son intégration à votre système, en vous apportant un soutien pour tous les ajustements nécessaires.
Nos avantages
Pourquoi choisir Guidenav ?
Approuvé par les acteurs clés
Nos systèmes de navigation inertielle de pointe sont utilisés par des organisations de premier plan dans les secteurs de l'aérospatiale, de la défense, du commerce et de l'industrie, dans plus de 25 pays. Notre réputation de fiabilité et de précision nous distingue.
Performances optimales
Nos produits offrent des performances de pointe et une excellente stabilité de polarisation. Conçue pour les applications les plus exigeantes, notre centrale inertielle à base de MEMS atteint une précision de polarisation de ≤ 0,1°/h.
Éprouvé en milieu difficile
Nos solutions sont conçues pour résister aux conditions extrêmes, offrant des performances constantes même dans les environnements les plus difficiles.
Excellentes performances en présence de vibrations
Notre technologie MEMS et FOG IMU excelle dans les environnements à fortes vibrations, garantissant précision et stabilité même dans les environnements opérationnels les plus difficiles.
Système PLUG & PLAY
Nos systèmes sont conçus pour une intégration facile, offrant des solutions prêtes à l'emploi qui simplifient l'installation et réduisent le temps de configuration, vous permettant ainsi de vous concentrer sur votre mission.
SANS ITAR
Nos produits sont exempts de la réglementation ITAR, ce qui vous permet de simplifier vos transactions internationales et de réduire les obstacles réglementaires. Choisissez GuideNav pour des opérations mondiales fluides.
Notre usine - À voir absolument








Pourquoi nous choisir ?
Des solutions complètes pour tous vos besoins de navigation
Couverture de qualité commerciale
Stabilité du biais : >0,2°/h
Solution : Gyroscope/IMU/INS à base de MEMS
Applications : navigation automobile, véhicules aériens sans pilote, transport, robotique, etc.
Couverture de qualité tactique
Stabilité du biais : 0,05°/h-0,2°/h
Solution : Gyroscope/IMU/INS à base de fibres optiques et de MEMS
Applications : opérations de véhicules blindés, artillerie antiaérienne, ciblage de précision, etc.
Couverture de navigation par niveau
Stabilité du biais : ≤0,05°/h
Solution : Fibre optique et laser annulaire Gyroscope/IMU/INS
Applications : guidage à moyenne et longue portée, aviation militaire, satellites




FAQ
Réponses à vos questions
Une centrale inertielle MEMS (IMU) est un dispositif compact qui mesure les paramètres de mouvement, notamment l'accélération et la vitesse angulaire, grâce à la technologie des systèmes microélectromécaniques (MEMS). Elle intègre des accéléromètres et des gyroscopes pour suivre l'orientation et le mouvement dans l'espace tridimensionnel. Les données recueillies sont essentielles pour les applications exigeant un suivi de mouvement précis.
Les centrales inertielles MEMS de GuideNav sont idéales pour une vaste gamme d'applications exigeant une précision et une fiabilité élevées, notamment dans les secteurs de l'aérospatiale, de la défense, des véhicules autonomes, de la robotique, des systèmes industriels, de l'exploration sous-marine et du positionnement de pipelines. Nos centrales inertielles excellent dans les environnements difficiles où la stabilité et la précision sont essentielles. De plus, nous proposons des solutions personnalisables avec différents niveaux de précision afin de répondre aux exigences spécifiques de chaque secteur. Contactez-nous pour une solution sur mesure adaptée à vos besoins.
Les indicateurs clés comprennent la stabilité du biais, la marche aléatoire angulaire, la bande passante et la compensation de température. Nous proposons différents modèles aux performances variées, afin de répondre aux besoins spécifiques de chaque application. Une personnalisation est possible pour adapter les spécifications aux exigences précises de votre projet ; contactez-nous pour plus d'informations.
Les centrales inertielles MEMS de GuideNav font l'objet d'un étalonnage complet, incluant la compensation dynamique et thermique, afin de garantir leur stabilité dans tous les environnements. Nos modèles intègrent également des algorithmes avancés de correction d'erreurs et d'intégrité des données. Pour les applications exigeant différents niveaux de précision, nous proposons des solutions sur mesure.
GuideNav propose un large éventail d'options de personnalisation, notamment le choix de l'interface (RS232, RS422, etc.), des débits de données ajustables, une plage de fonctionnement étendue et même différents matériaux de boîtier. Nous pouvons adapter les performances à vos besoins spécifiques. Contactez-nous pour explorer une solution sur mesure pour votre projet.
Les centrales inertielles MEMS offrent un suivi de mouvement fiable, une grande stabilité et une robustesse à toute épreuve, même dans des conditions extrêmes, des atouts essentiels pour des applications telles que le guidage de missiles, la navigation aérienne et les systèmes autonomes. Les solutions de GuideNav couvrent différents niveaux de précision afin de s'adapter à la diversité des profils de mission au sein de ces secteurs.
Nos centrales inertielles MEMS sont conçues pour une fiabilité optimale dans des environnements extrêmes, supportant des températures de -40 °C à +85 °C et offrant une haute résistance aux vibrations, aux chocs et à l'humidité. Nous proposons également des spécifications environnementales personnalisables pour les applications aux exigences opérationnelles spécifiques.
Les centrales inertielles MEMS utilisent des capteurs à l'échelle micrométrique, ce qui les rend plus petites, plus légères et souvent plus économes en énergie que les centrales inertielles traditionnelles. Bien que ces dernières puissent offrir une précision supérieure dans certains cas, GuideNav propose différents modèles MEMS qui allient rentabilité et hautes performances. La personnalisation nous permet de répondre à vos besoins de précision.
Bien sûr ! Notre blog regorge d'articles informatifs qui explorent les principes fondamentaux des centrales inertielles MEMS. Vous pouvez notamment y consulter des sujets tels que :
- Quelle est la précision de l'unité de mesure inertielle (IMU) ?
- Qu'est-ce qu'une centrale inertielle MEMS ?
- Le guide ultime des centrales inertielles (IMU) :
ces ressources vous aideront à mieux comprendre la technologie, la précision et les applications des centrales inertielles MEMS. N'hésitez pas à les consulter et à nous contacter pour toute question !