Avant qu'un drone ou une plateforme sans pilote ne débute sa mission, son système de navigation inertielle doit s'adapter à l'environnement. Sans initialisation adéquate, même le meilleur système de navigation inertielle à fibre optique ne peut garantir un cap, une attitude ou une position fiables. Ce processus peut ne prendre que quelques minutes, mais l'initialisation de la navigation est essentielle au succès de la mission.
Un INS à fibre optique s'initialise avant le décollage en stabilisant la température, en alignant les gyroscopes et les accéléromètres, en estimant le biais et en effectuant un alignement d'attitude grossier à fin, garantissant ainsi une navigation précise dès la première seconde de vol.
L'initialisation est souvent sous-estimée, pourtant elle détermine dès le départ la précision des données de navigation ou leur dérive. Pour les drones et autres plateformes autonomes, la procédure comprend le conditionnement thermique, l'étalonnage des biais et l'alignement d'attitude . Chaque étape garantit que le système de navigation interne est prêt pour la mission avant même que les moteurs ou les rotors ne commencent à tourner.
Table des matières
Pourquoi la stabilisation de la température est-elle primordiale ?
Avant tout alignement, un INS à fibre optique doit d'abord atteindre l'équilibre thermique . Cette étape est cruciale car les fluctuations de température affectent directement la polarisation et le facteur d'échelle du capteur. L'omettre est quasiment la garantie d'une mauvaise initialisation.
- Les gyroscopes et les accéléromètres sont très sensibles à la température → même de petits décalages peuvent fausser les lectures.
- Un préchauffage est nécessaire → le système a besoin de temps pour se stabiliser avant que des données fiables puissent être produites.
- Sans stabilisation, la dérive de polarisation peut être décuplée → conduisant à une qualité d'alignement dégradée.
- Meilleure pratique : mettre sous tension 10 à 20 minutes avant le départ → s'assurer que l'INS démarre à partir d'une ligne de base stable.
Comment les biais sont-ils estimés lors de l’initialisation ?
Une fois l'INS sous tension et immobilisé, il mesure les signaux de sortie de ses gyroscopes et accéléromètres au fil du temps. Ces mesures permettent d'estimer le biais statique , qui représente l'erreur inhérente du capteur en l'absence de mouvement. Même des biais microscopiques, s'ils ne sont pas corrigés, peuvent s'accumuler et entraîner d'importantes erreurs de navigation. En moyennant et en modélisant les signaux pendant cette phase, l'INS effectue un alignement précis avec des données claires et fiables.
Que se passe-t-il lors d’un alignement grossier ?
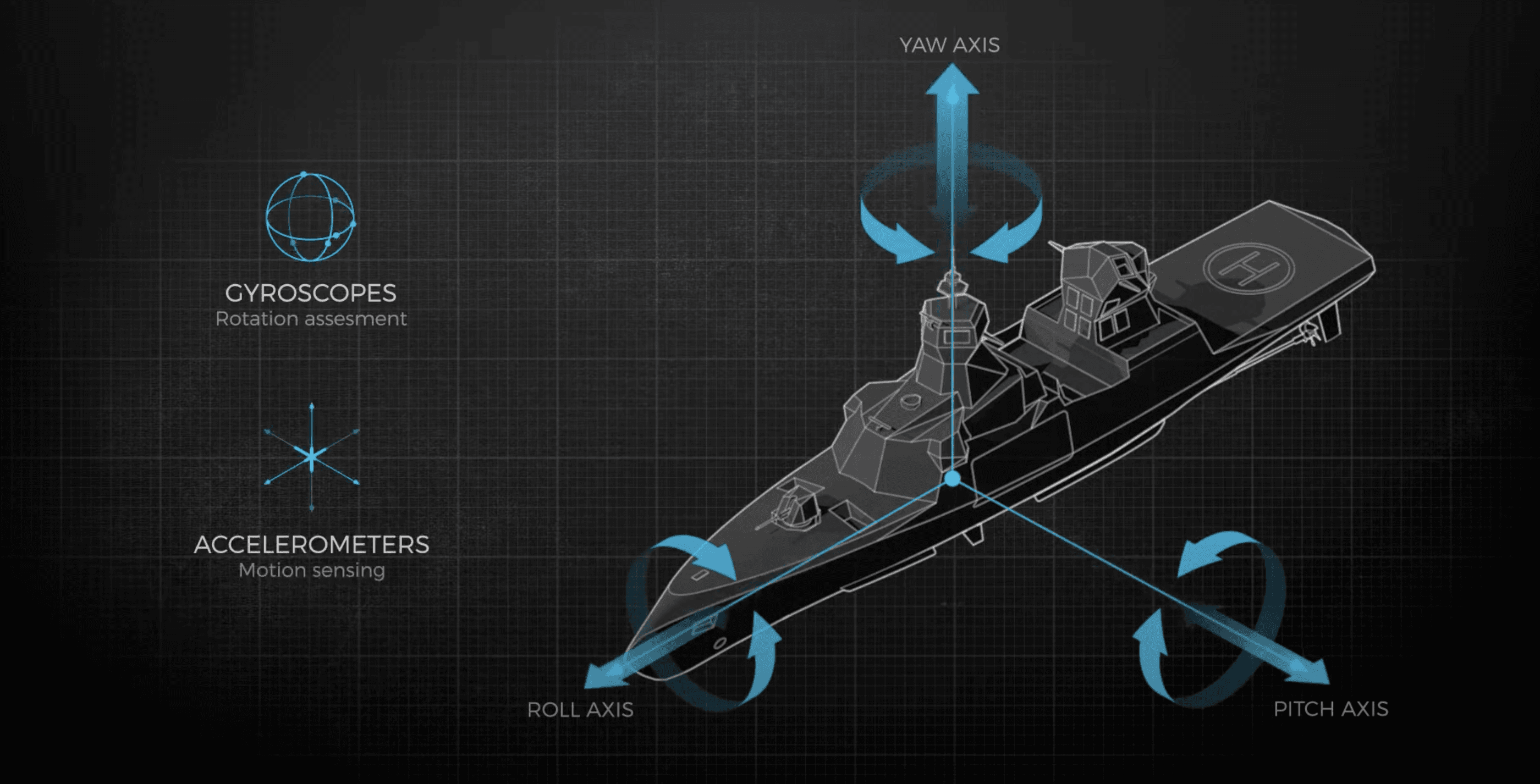
Après stabilisation thermique et estimation du biais, l'INS à fibre optique entame la phase d'alignement grossier . À ce stade, le système ne vise pas encore une précision totale, mais se concentre plutôt sur la construction d'une première estimation fiable de son orientation. En s'appuyant sur des références naturelles – gravité et rotation terrestre –, l'INS peut établir une ligne de base pour le tangage, le roulis et le cap. Ce processus est fondamental, car sans un alignement grossier solide, un alignement fin ne peut converger correctement .
- La gravité des accéléromètres → fournit le tangage et le roulis.
- Rotation de la Terre à partir de gyroscopes → fournit le cap.
- Le processus prend plusieurs minutes → fournissant une ligne de base d’attitude approximative.
- Cette ligne de base est ensuite affinée ultérieurement → formant la base d’un alignement précis.
Comment l’alignement fin est-il obtenu ?
Une fois l'alignement grossier établi, le système passe à l'alignement fin , où la précision est progressivement améliorée. Durant cette phase, le système de navigation intérieure (INS) à fibre optique applique un filtrage avancé, souvent un filtre de Kalman , pour combiner les données des capteurs et réduire les erreurs résiduelles. L'alignement fin affine en continu le cap, le tangage et le roulis , réduisant ainsi les légers écarts persistants après l'alignement grossier. À chaque cycle, l'INS se rapproche d'une précision de navigation optimale , garantissant ainsi une orientation stable et fiable du drone au début de sa mission.
Pourquoi l’INS doit-il rester stationnaire ?
Lors de l'initialisation, l'INS doit séparer les signaux de référence naturels (gravité et rotation terrestre) des mouvements réels de la plateforme. Si le drone bouge pendant ce processus, les mesures des capteurs sont falsifiées, ce qui entraîne une estimation erronée des biais et un alignement incorrect. Il est donc essentiel de maintenir le système parfaitement immobile pour garantir une initialisation fiable.
Points clés à retenir :
- Le mouvement introduit de faux signaux que le système peut interpréter à tort comme faisant partie de l’alignement.
- Les conditions stationnaires permettent une véritable estimation du biais , produisant un modèle plus propre pour la correction de la dérive.
- Toute vibration ou mouvement peut retarder ou corrompre l'initialisation , forçant des temps de convergence plus longs.
Comment les aides GNSS améliorent-elles l’initialisation ?
Le GNSS peut accélérer considérablement le processus d'alignement en fournissant des informations de position et de vitesse absolues. Associées à un INS à fibre optique, ces données externes réduisent le temps nécessaire pour atteindre une précision de navigation optimale.
| Avec l'aide du GNSS | Sans aide GNSS |
|---|---|
| L'alignement converge beaucoup plus rapidement, souvent en quelques minutes. | L'alignement repose uniquement sur des capteurs inertiels et prend plus de temps à se stabiliser. |
| La précision du cap s'améliore rapidement, en particulier lors d'un alignement précis. | Les erreurs de cap peuvent rester plus importantes jusqu’à ce qu’un temps suffisant se soit écoulé. |
| Idéal pour les missions de drones à déploiement rapide. | Convient aux opérations refusées par GNSS mais nécessite de la patience. |
Quels sont les risques d’une mauvaise initialisation ?
Une initialisation incorrecte peut entraîner des erreurs dans la solution de navigation dès le départ. Ces problèmes peuvent rester invisibles au début, mais ils peuvent gravement affecter les performances de la mission une fois le drone en vol.
- Erreurs de cap → entraînent des chemins de navigation incorrects et une dérive cumulative.
- Écarts d'itinéraire → Les drones peuvent s'écarter des lignes de vol prévues, nécessitant des corrections fréquentes.
- Dépendance au GNSS → affaiblit la fiabilité dans les environnements sans GNSS.
- Temps de convergence prolongés → perte de temps et d’énergie opérationnelle.
- Confiance réduite → les opérateurs ne peuvent pas faire entièrement confiance à la solution de navigation.
La dernière étape avant le vol
Imaginez l'initialisation pré-vol comme le compte à rebours silencieux précédant le lancement d'une fusée. Rien de spectaculaire ne se produit à l'extérieur, mais chaque capteur, chaque algorithme et chaque circuit à l'intérieur du système de navigation par fibre optique se mettent en place. Ignorez le compte à rebours et le lancement risque d'échouer ; respectez-le et la mission débutera en toute confiance.
Pour les opérateurs de drones, cela signifie ne jamais se précipiter lors du préchauffage, de l'estimation du biais ou de l'alignement. Chaque étape est invisible à l'œil nu, mais essentielle à la précision en vol. Le résultat est simple : moins de surprises, une convergence plus rapide et un système de navigation fiable en cas d'indisponibilité du GNSS.
Chez GuideNav , nous concevons nos unités INS à fibre optique pour soutenir cette discipline grâce à un préchauffage rapide, des autotests robustes et des algorithmes d'alignement fiables . Suivez les étapes appropriées, associez-les à la technologie adéquate, et votre drone décollera toujours prêt à relever les défis à venir.
