Sur le papier, de nombreux accéléromètres MEMS semblent identiques, jusqu'à ce qu'ils ne le soient plus. De légères différences de dérive de polarisation, de bande passante ou de tolérance aux chocs peuvent se répercuter sur les contrôleurs de vol, les systèmes de guidage et les robots industriels, dégradant les performances d'une manière que les spécifications seules ne peuvent révéler. Ce qui suit est le fruit d'années de validation en laboratoire, d'intégration sur le terrain et de tests système.
Le choix d'un accéléromètre MEMS ne se limite pas aux chiffres de la fiche technique. Des facteurs concrets comme la dérive thermique, l'endurance aux vibrations et la stabilité du biais sur le terrain déterminent souvent les performances du système là où elles comptent. Ce guide se concentre sur les points clés pour les plateformes de défense, d'aérospatiale et de robotique.
La fiabilité au niveau du système commence par des décisions au niveau des capteurs. Examinons cela de plus près.
Table des matières
Qu'est-ce qu'un accéléromètre MEMS et comment fonctionne-t-il ?
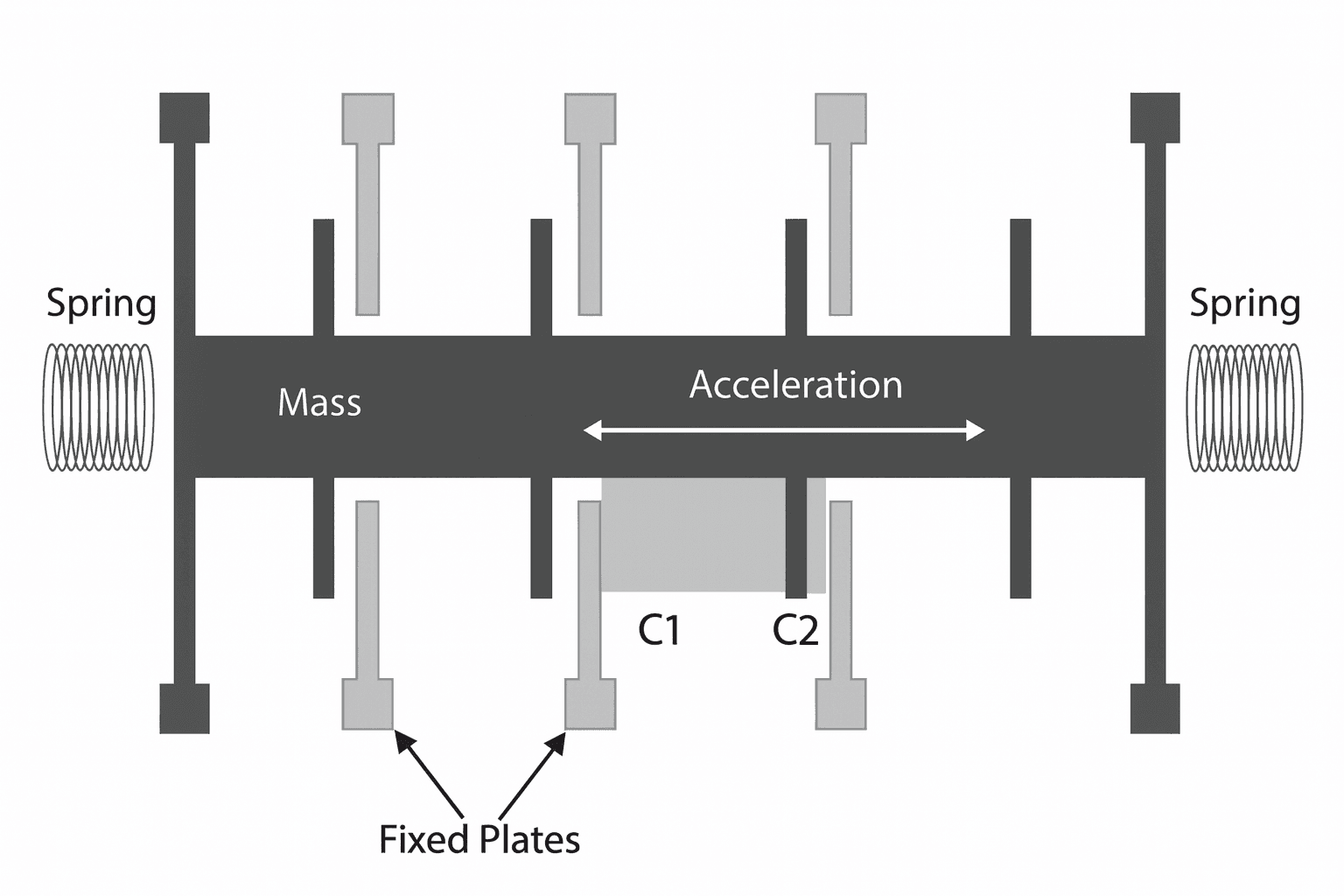
Un accéléromètre MEMS est un capteur microélectromécanique conçu pour mesurer l'accélération linéaire selon un ou plusieurs axes. Il détecte le mouvement en suivant les variations de capacité d'une minuscule masse étalon se déplaçant dans sa structure interne.
Lors d'une accélération, la masse se déplace légèrement, modifiant la sortie électrique du capteur. Cela lui permet de capter à la fois les forces statiques (comme la gravité) et dynamiques (comme les vibrations, les chocs ou les mouvements).
Comparés aux accéléromètres mécaniques ou piézoélectriques traditionnels, les accéléromètres MEMS sont plus petits, plus légers et plus économes en énergie. Ils sont largement utilisés dans les systèmes de navigation inertielle (INS) , les contrôleurs de vol , les plateformes robotiques et les systèmes d'armes de défense , où une détection de mouvement compacte, robuste et réactive est essentielle.
Quelles spécifications définissent un accéléromètre MEMS de haute qualité ?
Lors de la comparaison des accéléromètres MEMS, il est essentiel de ne pas se limiter à la plage g. Quatre spécifications clés influencent directement les performances :
- La stabilité du biais détermine l'ampleur de la dérive accumulée au fil du temps. Pour les systèmes de navigation, des valeurs inférieures à 50 µg sont préférables.
- La densité du bruit affecte la clarté du signal. Des valeurs plus faibles (par exemple, < 100 µg/√Hz ) permettent une détection de mouvement plus précise.
- La bande passante définit la réactivité. Les applications impliquant des mouvements rapides, comme le contrôle de vol des drones, nécessitent souvent plus de 1 kHz .
- La plage de mesure varie selon le cas d'utilisation. Les accéléromètres à forte accélération (jusqu'à 20 000 ) sont utilisés pour la surveillance des impacts, tandis que les accéléromètres à faible accélération ( ± 2 g à ± 10 g ) sont adaptés à l'inclinaison ou aux mouvements lents.
Choisir une mauvaise spécification (trop bruyante, trop étroite ou trop imprécise) peut entraîner une instabilité du contrôle, une précision dégradée ou un échec de la mission.
Les accéléromètres MEMS peuvent-ils gérer des conditions difficiles ?
Tous les accéléromètres MEMS ne sont pas adaptés au monde réel. Sur le papier, beaucoup annoncent de larges plages de température ou des limites de chocs élevées, mais les conditions de terrain révèlent la véritable lacune .
Prenons l'exemple des vibrations. Nous avons testé un capteur sur un UGV chenillé opérant sur un terrain accidenté. En deux jours, sa polarisation de sortie avait dévié de plus de 500 µg, suffisamment pour rompre l'alignement dans un système de navigation à l'estime. Il avait réussi tous les tests en laboratoire, mais pas la mission.
Il en va de même pour les cycles thermiques . Un capteur embarqué peut observer une variation de température de la cabine de –20 °C au décollage à +60 °C après plusieurs heures de surchauffe du moteur. À moins que sa compensation thermique ne soit véritablement stable, l'erreur s'accumule silencieusement .
C’est le prix à payer pour se fier aux chiffres plutôt qu’à la durabilité prouvée.
La véritable robustesse signifie résister non seulement aux conditions extrêmes, mais aussi à la répétition. Privilégiez toujours des capteurs validés pour les charges du profil de mission , et non pas uniquement celles des spécifications techniques. Dans l'aérospatiale et la défense, la résilience sous contrainte n'est pas facultative : elle est opérationnelle.
Que devez-vous savoir sur l’alimentation, l’interface et le débit de données ?
Lors de l'intégration d'un accéléromètre MEMS dans des systèmes embarqués, la compatibilité électrique est tout aussi importante que les spécifications de performances.
La consommation d'énergie a un impact sur l'efficacité globale du système, en particulier pour les drones, les appareils portables et les robots autonomes. De nombreux capteurs tactiques fonctionnent à moins de 1 mA , mais les modes haute vitesse ou les autotests peuvent augmenter considérablement la consommation de courant.
Le type d'interface définit la charge de travail d'intégration. SPI est rapide et robuste, adapté aux boucles de navigation et de contrôle. I²C est plus simple mais plus lent, souvent utilisé dans les applications de surveillance ou de temporisation non critiques. Certains capteurs offrent également une sortie analogique pour les systèmes existants.
Le débit de données de sortie (ODR) doit correspondre à la vitesse de traitement de votre système. Les plateformes de contrôle de vol ou de navigation nécessitent généralement une fréquence supérieure ou égale à 1 kHz , tandis que la surveillance structurelle peut ne nécessiter que 100 à 200 Hz .
Négliger ces paramètres peut entraîner des problèmes de synchronisation, une consommation d'énergie inutile ou une panne totale de communication. Vérifiez toujours les spécifications électriques par rapport à la conception de votre système dès le début du processus de sélection.

Qu'est-ce qui fait de GuideNav un fournisseur fiable d'accéléromètres MEMS ?
En tant que véritable fabricant de capteurs, et non seulement intégrateur, GuideNav conçoit et fabrique des accéléromètres MEMS de A à Z. Cela nous permet de maîtriser totalement les performances, la personnalisation et le support à long terme. Dans les déploiements réels, c'est cette profondeur, et non seulement les spécifications techniques, qui détermine la réussite ou l'échec de l'intégration.
C'est pourquoi les ingénieurs font confiance à GuideNav, non seulement pour les performances des capteurs, mais également pour l'écosystème de support complet qui les sous-tend.
Support adapté aux applications
Nos ingénieurs collaborent du concept au déploiement, offrant une assistance en temps réel lors du réglage des capteurs, des tests de la plate-forme et du dépannage de l'intégration.
Personnalisation flexible
Besoin d'une bande passante, d'une plage de sortie ou d'une connexion spécifique ? Nous adaptons nos accéléromètres MEMS aux besoins électriques et mécaniques précis de votre plateforme.
Stabilité de l'approvisionnement à long terme
GuideNav maintient une traçabilité complète de la production et une planification du cycle de vie, garantissant une livraison stable sur des années de programmes industriels ou de défense.
Sans ITAR et favorable à l'exportation
Nos capteurs MEMS sont conformes à une utilisation mondiale et exempts de restrictions de réexportation américaines, ce qui les rend idéaux pour les programmes internationaux.
Documentation prête à être déployée
Des fiches techniques complètes aux modèles 3D et aux guides de firmware, notre documentation technique réduit le temps d'intégration et les risques.
Choisir un capteur n'est qu'un début. Choisir GuideNav, c'est choisir un partenaire pour l'ensemble du cycle de développement.