Dans le monde en évolution rapide de la robotique, des problèmes persistants comme AGV (véhicules guidés automatisés) ou les bras robotiques instables sont rarement causés par des logiciels défectueux. Au lieu de cela, ils remontent souvent aux performances inadéquates du gyroscope. Les IMU de bas grade introduisent les erreurs de dérive, de latence et de rétroaction - les boucles de contrôle sous-réminisantes. La solution réside dans le déploiement de gyroscopes MEMS de qualité précisérée pour la stabilité, la réactivité et l'intégration en temps réel dans les systèmes robotiques dynamiques.
Les gyroscopes MEMS forment le noyau inertiel de la robotique avancée - disant une détection précise de la vitesse angulaire, un suivi d'orientation en temps réel et une rétroaction de mouvement fiable dans des packages compacts et économes en puissance. Ils sont indispensables pour permettre une navigation stable et des mouvements dextères pour les AGV et les bras robotiques humanoïdes.
Au cours de la dernière décennie, j'ai travaillé sur des dizaines de déploiements robotiques - de l'évaluation précoce de l'IMU à l'intégration complète de la pile - et une vérité se démarque: la qualité de détection inertielle définit si un robot fonctionne simplement ou fonctionne vraiment.
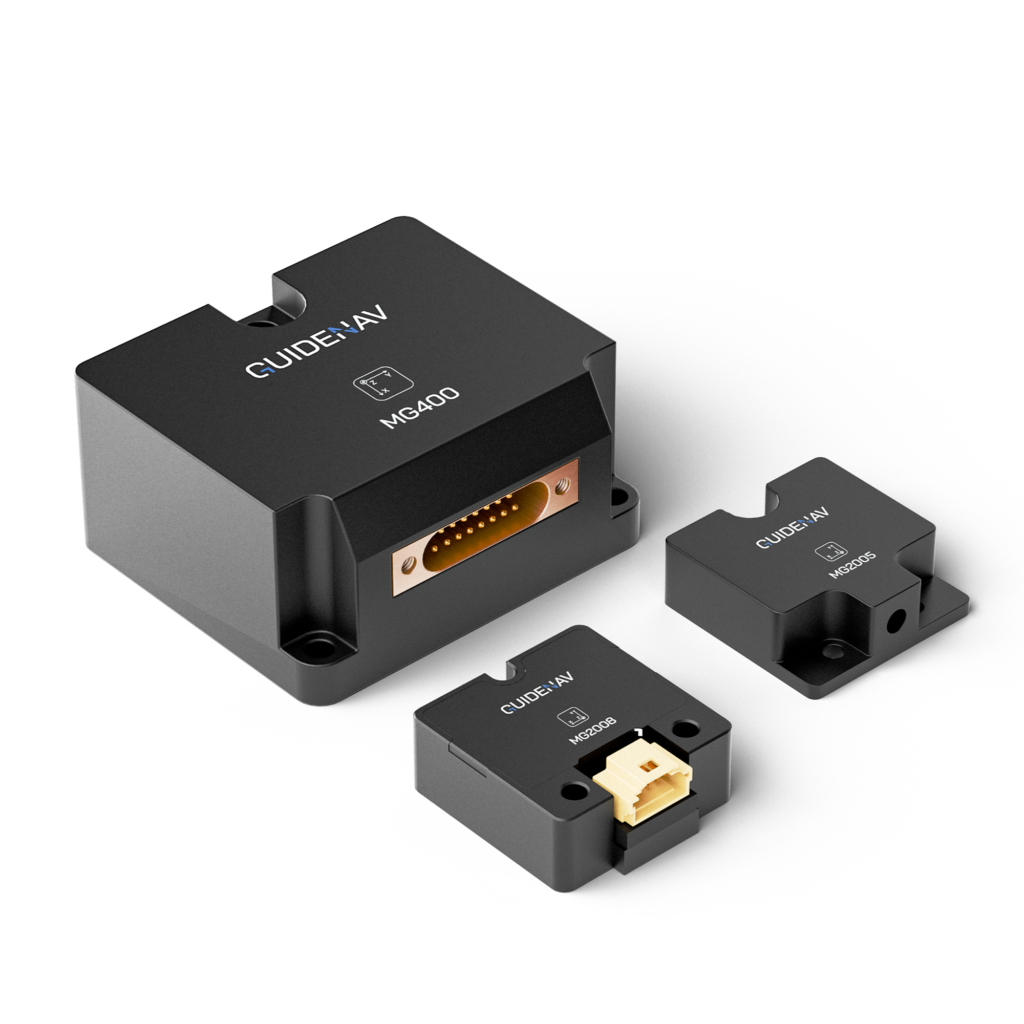
Table des matières
L'impact industriel des AGV et des robots humanoïdes
Les AGV et les bras robotiques humanoïdes ne sont plus des concepts futuristes - ils deviennent rapidement des actifs fondamentaux dans les entrepôts, les usines et même les hôpitaux. Le marché AGV devrait passer de 4,5 milliards de dollars en 2023 à 12 milliards de dollars d'ici 2028 , tandis que la robotique humanoïde devrait passer de 1,6 milliard de dollars à 8,9 milliards de dollars , reflétant un TCAC de 22% et 41% respectivement.
sont alimentés par cette croissance dans les coulisses de MEMS qui fournissent des données d'orientation en temps réel et de vitesse angulaire. Sans eux, les AGV perdent la précision de la précision et les bras humanoïdes luttent avec l'équilibre et la réactivité.
| Segment | 2023 Taille du marché | 2028 prévisions | CAGR (2023-2028) |
|---|---|---|---|
| AGV-AGV | 4,5 milliards de dollars | 12,0B $ | 22% |
| Bras robotiques humanoïdes | 1,6 milliard de dollars | 8,9 milliards de dollars | 41% |
Chez GuidenAV , nos gyroscopes MEMS sont conçus pour répondre aux exigences de cette nouvelle génération de robotique - combinant stabilité élevée , une faible latence et des facteurs de forme compacts idéaux pour l'intégration dans les plates-formes mobiles et les membres articulés. Des flottes autonomes aux manipulateurs dextères, nous fournissons le noyau inertiel qui maintient les robots équilibrés, précis et en contrôle.
Comment les gyroscopes MEMS fonctionnent-ils réellement?
Les gyroscopes MEMS détectent la vitesse angulaire à travers l' effet Coriolis . À l'intérieur de chaque capteur, les structures microscopiques vibrent le long d'un axe fixe. Lorsque la rotation se produit, la force de Coriolis provoque un décalage détectable de ces vibrations, qui est ensuite traduit en données de débit angulaire.
Grâce à la fabrication compatible CMOS , ces structures s'intègrent dans une petite puce qui est économe en puissance, résistante aux chocs et idéale pour la robotique intégrée.
Mais rendre les gyros MEMS viables pour la robotique du monde réel prend plus que la miniaturisation. Les principales avancées comprennent:
- Asics à faible bruit pour une sortie de signal propre et haute fréquence
- Étalonnage thermique intégré pour stabiliser les performances sur la température
- Amortissement mécanique pour résister aux vibrations et aux chocs
C'est pourquoi dans la robotique du monde réel - où les vibrations, les virages soudains et les changements thermiques sont la norme - nos gyroscopes MEMS restent fiables, réactifs et prêts à se déployer.

Pourquoi les gyroscopes MEMS sont-ils vitaux en robotique?
À mesure que les systèmes de robotique deviennent plus rapides, plus mobiles et plus dynamiques, le contrôle d'orientation précis n'est plus facultatif - il est critique de mission. Alors que de nombreux capteurs peuvent détecter le mouvement, seuls les gyroscopes MEMS offrent une mesure de vitesse angulaire en temps réel indépendamment des références externes comme le GPS ou les champs magnétiques. Cela les rend irremplaçables dans les scénarios où le timing, la stabilité et la réactivité ont un impact directement sur la sécurité et les performances.
Leur valeur devient encore plus apparente dans deux segments robotiques à forte croissance:
- Dans AGVS , les gyrostaux MEMS prennent en charge le rétablissement des prises pendant les pannes GPS, ce qui permet des virages en douceur, une rubrique cohérente et des commentaires en temps réel pour la planification du slam et du chemin.
- Chez les robots humanoïdes , ils permettent un mouvement conjoint coordonné, une réaction rapide aux forces externes et un contrôle continu de l'équilibre pendant la marche ou la manipulation.
Par rapport aux capteurs inertiels hérités, MEMS Gyros apporte trois avantages clés:
- Miniaturisation - facilement intégrée dans des robots mobiles compacts et des articulations articulées
- Évolutivité - suffisamment rentable pour l'intégration à l'échelle de la flotte ou de la plainte
- Performances à faible latence - permettant des boucles de rétroaction étroites essentielles pour le mouvement dynamique
Au lieu de traiter MEMS Gyros comme des composants génériques, GuidenAV les concevait spécifiquement pour les plates-formes robotiques , ce qui a non seulement le matériel du capteur, mais aussi le firmware, la conception de filtre et l'intégration mécanique. Cette approche axée sur les applications est la raison pour laquelle nos gyroscopes surpassent constamment les options standard dans des environnements de robotique exigeants.
Comment sélectionner le bon gyroscope MEMS pour la robotique
Tous les gyroscopes MEMS ne sont pas créés égaux - et le choix du mauvais peut entraîner une dérive de performances, une instabilité du système ou une inefficacité énergétique. Le gyro idéal dépend fortement du facteur de forme de la plate-forme robotique, de la dynamique de mouvement et de la sensibilité à la boucle de contrôle.
Voici comment j'approche généralement de la sélection MEMS Gyro pour différents systèmes robotiques:
Pour AGVS (véhicules guidés automatisés):
- La stabilité du biais : modéré (<10 ° / h) est suffisant pour un rétablissement mort court à milieu de gamme.
- Bande passante : 50–100 Hz pour les mises à jour de cap lisses sans bruit excessif.
- Tolérance aux chocs : doit résister à> 5000 g pour la durabilité mécanique lors des événements de mouvement.
- Puissance : inférieure à 100 MW pour maintenir l'efficacité énergétique à l'échelle du système.
Pour les bras robotiques humanoïdes:
- Stabilité du biais : une précision élevée (<3 ° / h) est essentielle pour la précision au niveau conjoint.
- Bande passante : 200+ Hz pour suivre l'articulation rapide et les commandes de moteurs fins.
- Facteur de forme : ultra-compact, car les capteurs sont intégrés dans chaque articulation.
- Budget de puissance : <50 MW par joint pour éviter l'accumulation de chaleur et la décharge de la batterie.
| Paramètre | Application AGV | Application humanoïde |
|---|---|---|
| Stabilité du biais | <10 ° / h | <3 ° / h |
| Bande passante | 50–100 Hz | 200+ Hz |
| Tolérance aux chocs | > 5000 g | > 3000 g |
| Taille | Compact | Ultra-compact |
| Pouvoir | <100 MW | <50 MW par articulation |
Avec des centaines de déploiements derrière nous, nous comprenons que les fiches de spécifications ne garantissent pas le succès. C'est pourquoi nous travaillons en étroite collaboration avec les ingénieurs du système robotique pour traduire les profils de mouvement du monde réel en configurations de capteurs qui offrent des performances et une fiabilité durables - non seulement dans le laboratoire, mais sur le sol de l'entrepôt et sur le terrain.
Cas d'utilisation 1: MEMS Gyros dans l'entrepôt AGVS
Les véhicules guidés autonomes (AGV) fonctionnent dans des environnements intérieurs denses où les signaux GPS ne sont pas fiables ou entièrement absents . Dans ces conditions, une estimation précise du cap est critique, en particulier sur de longs trajets ou des coins serrés. Mais même une petite dérive de capteurs peut s'accumuler rapidement, conduisant à des erreurs de navigation, à l'écart de chemin et à la précision du SLAM dégradé - entraînant finalement une défaillance au niveau des tâches ou une rupture opérationnelle .
C'est là que les gyroscopes MEMS deviennent essentiels . En fournissant des données continues à taux angulaire en temps réel, ils soutiennent:
- Dead-Reckoning lorsque GNSS n'est pas disponible
- Fusion de capteurs avec encodeurs de roues et slam basé sur la vision
- Stabilité dans le contrôle du mouvement et le recul de l'itinéraire sous dispositions dynamiques
Dans un déploiement, nous avons remplacé un gyro hérité par notre MEMS de qualité tactique dans une flotte AGV d'entrepôt. Au cours des cycles de mission répétés totalisant plusieurs heures d'exécution, la dérive de la tête a été réduite de 38% et les erreurs de localisation sont toujours restées dans les moins de 20 cm, même sans se soucier des marqueurs externes.
Pour les équipes de robotique travaillant sur les flottes AGV, la leçon est claire: la robustesse de la navigation commence par la précision inertielle - et cela commence par un gyro MEMS de haute qualité .
Cas d'utilisation 2: MEMS Gyros en bras humanoïdes
Les robots humanoïdes nécessitent une coordination articulaire précise et un ajustement de l'équilibre constant - souvent sur des dizaines de axes simultanément. Dans ce paramètre, même de légers retards de détection peuvent entraîner une instabilité ou une défaillance de mouvement.
En incorporant des gyroscopes MEMS directement dans chaque articulation, les robots gagnent:
- Rétroaction angulaire à grande vitesse pour le contrôle conjoint au niveau réflexe
- Stabilité pendant la démarche et la manipulation , même sur des surfaces inégales
- Réponse à faible latence aux forces externes et transitions de mouvement
Dans un projet, le remplacement des imus génériques par des gyrostaux de MEMS de qualité tactique de Guidenav a réduit les taux de chute de 42% et une précision de positionnement articulaire amélioré à 1,2 ° RMS , même pendant le mouvement rapide et variant.
En ce qui concerne le mouvement dynamique, la différence entre lisse et instable réside souvent dans la qualité du gyro MEMS .
Pourquoi guideav?
Le mouvement de précision en robotique commence par une détection d'inertie fiable. Chez GuidenAV , nous concevons des gyroscopes MEMS spécifiquement pour les plates-formes robotiques - construites pour résister aux chocs, minimiser la latence et s'adapter dans des environnements limités dans l'espace.
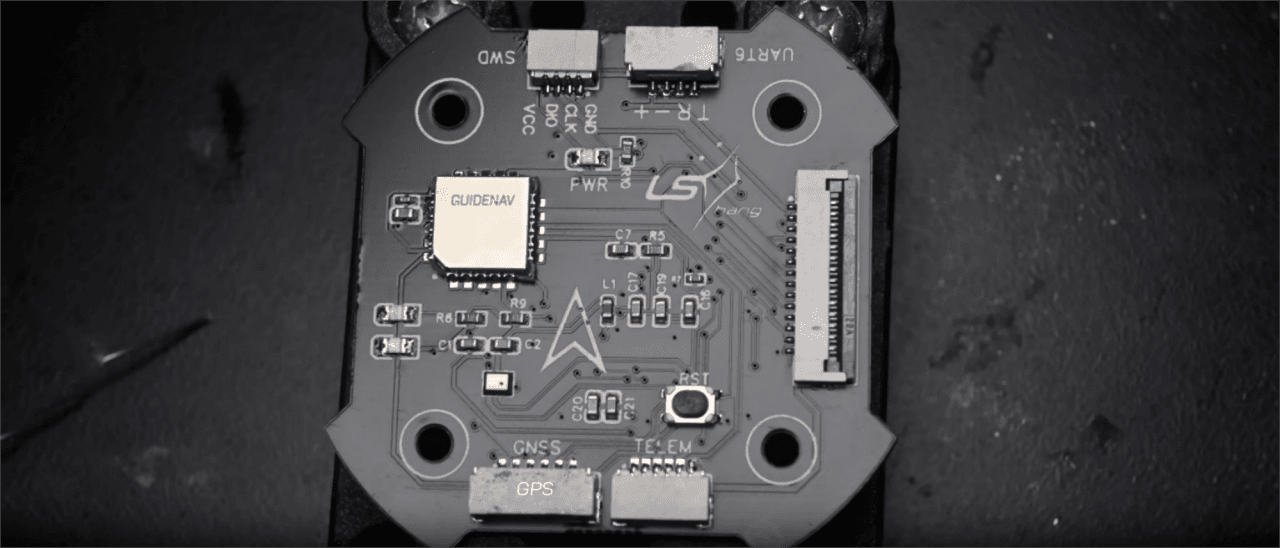
Pour les besoins d'intégration compacts tels que les articulations robotiques, nous proposons des solutions au niveau des puces comme le Guideg4000 - un gyro MEMS de sous-9 mm avec une instabilité de biais <1 ° / h et une bande passante jusqu'à 400 Hz. Lorsque une intégration de niveau supérieur est nécessaire, nos IMU de qualité tactique fournissent des performances robustes et à faible dérive entre les systèmes complets.
Du prototypage précoce au déploiement de volume, nous avons aidé les équipes de robotique dans le monde entier à transformer la précision en performance réelle. Parce que lorsque le mouvement compte, le bon gyro n'est pas seulement une spécification - c'est une base .