La dérive thermique de l'IMU est une source persistante d'erreurs de gyroscope : les variations de température entraînent une modification du biais du gyroscope, donnant l'impression qu'une unité statique est en rotation. Cette dérive s'accumulant dans le temps, même un faible biais peut engendrer des erreurs significatives d'attitude ou de cap pour les drones, les AGV, les robots et les plateformes stabilisées. La solution efficace est systématique : réduire la dérive thermique de l'IMU par une conception matérielle optimisée, la caractériser en fonction de la température lors de l'étalonnage et la compenser en ligne et en temps réel.
La dérive thermique de l'IMU est une cause majeure de dégradation de la précision des systèmes inertiels. Grâce à l'optimisation matérielle, à l'étalonnage thermique complet et à la compensation en ligne, les ingénieurs peuvent réduire considérablement cette dérive et garantir une stabilité d'attitude optimale.
La dérive thermique des centrales inertielles (IMU) résulte du comportement physique des dispositifs MEMS et FOG. Les variations de température entraînent une modification du biais du capteur et, en l'absence de correction, cette dérive s'accumule et engendre des erreurs d'attitude à long terme. La gestion de cette dérive nécessite de comprendre l'influence de la température sur le capteur, de caractériser sa dérive par étalonnage et d'appliquer une compensation en temps réel. Grâce à une conception matérielle appropriée, un filtrage efficace et une fusion de données de capteurs performante, cette dérive devient prévisible et parfaitement maîtrisable.
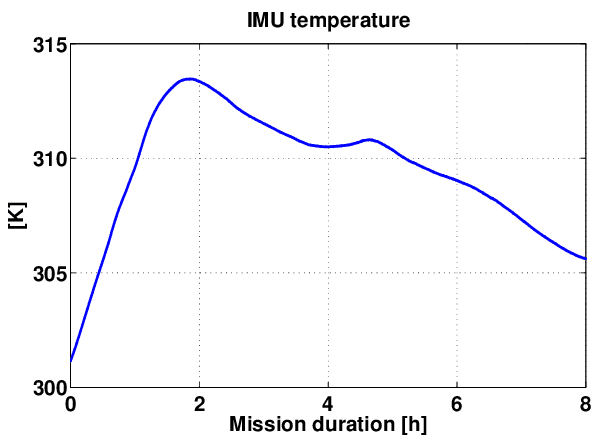
Table des matières
Comprendre la dérive de température du gyroscope
Avant d'étudier comment atténuer la dérive thermique de l'IMU, il est important de comprendre ce que représente ce phénomène. La dérive thermique n'est pas un bruit aléatoire ; il s'agit d'une variation systématique du biais due aux fluctuations de la température interne du capteur. Ce biais étant intégré à l'estimation d'attitude, la dérive thermique de l'IMU peut engendrer d'importantes erreurs de cap ou d'orientation lors d'une utilisation prolongée.
Le signal de sortie d'un gyroscope est :
Vitesse angulaire mesurée = vitesse réelle + biais + bruit
La dérive thermique de l'IMU fait référence à la variation du terme de biais en fonction de la température , et ce mécanisme diffère pour les gyroscopes MEMS et FOG.
Gyroscopes mems
La dérive thermique des centrales inertielles à base de MEMS provient des variations du module d'élasticité, des décalages de fréquence de résonance, des variations d'amortissement, de la dérive du gain du circuit intégré spécifique et des contraintes liées au boîtier. Ces effets entraînent souvent une dérive importante lors de la mise en température ou des décalages de polarisation durant les transitions thermiques rapides.
Gyroscopes FOG
Les dispositifs FOG présentent une dérive thermique de l'IMU plus faible, mais restent sensibles aux variations de phase optique, aux décalages de longueur d'onde de la source lumineuse, à la dilatation de la bobine de fibre et aux contraintes thermiques. Leur dérive est plus régulière, mais doit néanmoins être modélisée et compensée.
Pourquoi le drift devient une grave erreur d'attitude
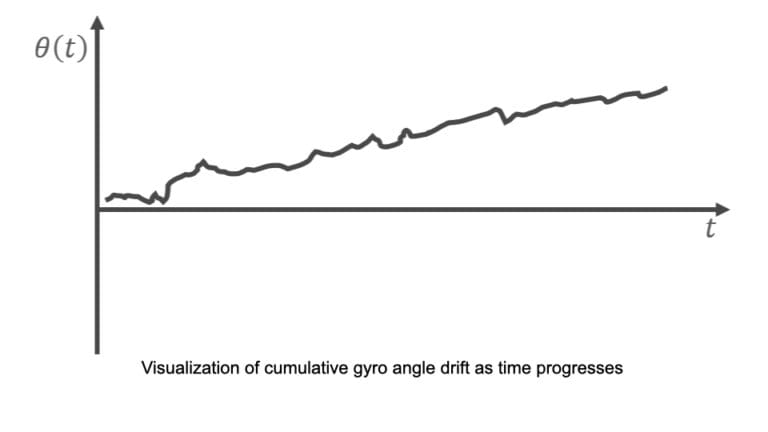
Même si la dérive thermique peut paraître minime au moment où elle se produit, son impact devient considérable dès lors qu'elle intervient dans le processus d'estimation d'attitude. Les gyroscopes mesurent la vitesse angulaire, et l'attitude est obtenue en intégrant cette vitesse dans le temps. Tout biais non corrigé, aussi infime soit-il, continue de s'accumuler, engendrant des erreurs croissantes de roulis, de tangage et surtout de cap lors d'opérations de longue durée.
Le biais du gyroscope est intégré dans le temps :
Erreur d'attitude ≈ ∫ biais × temps
C’est pourquoi un biais apparemment mineur, tel que 0,01 °/s, peut engendrer une erreur d’orientation de plusieurs degrés en quelques minutes. Plus la mission est longue et moins les références externes sont nombreuses, plus la dérive thermique influence la précision globale de la navigation.
Trois méthodes d'ingénierie fondamentales pour atténuer la dérive thermique
La réduction de la dérive thermique des gyroscopes exige une approche d'ingénierie multicouche qui s'attaque au problème à sa source, le modélise dans des conditions contrôlées et le corrige en continu pendant le fonctionnement. Les ingénieurs appliquent généralement trois méthodes complémentaires : l'optimisation matérielle, l'étalonnage thermique hors ligne et la compensation en temps réel.
(1) Optimisation matérielle : réduction de la dérive à la source
Les améliorations matérielles influent grandement sur la stabilité intrinsèque du gyroscope. Parmi les stratégies efficaces, on peut citer le choix de capteurs à faible coefficient de température, l'utilisation de matériaux structurels thermiquement stables, le maintien de configurations symétriques et la gestion du flux thermique interne. Les centrales inertielles haut de gamme peuvent également intégrer un élément chauffant ou un module de contrôle thermique afin de maintenir le capteur à une température de fonctionnement stable et de minimiser ainsi la dérive intrinsèque.
(2) Étalonnage de température hors ligne : construction d’un modèle biais-température
Lors de la fabrication, l'IMU est placée dans une enceinte climatique et balayée sur toute sa plage de fonctionnement (par exemple, de −40 °C à +85 °C). Les valeurs de biais sont enregistrées à chaque point de température, puis intégrées à un modèle de compensation (linéaire, polynomial ou par morceaux). Les coefficients du modèle sont stockés dans le micrologiciel et servent de base à une correction précise en temps réel.
(3) Compensation en ligne : correction de la dérive en temps réel
Grâce à un modèle de correction de dérive en fonction de la température, l'IMU compense la dérive en fonctionnement. Un capteur de température situé près du cœur du gyroscope fournit des relevés de température en temps réel. Le micrologiciel calcule la dérive attendue à l'aide du modèle, et cette dérive est soustraite des mesures brutes. Ceci permet de contrer la dérive due à la phase de montée en température, à l'échauffement interne et aux variations de température ambiante.

Au-delà de la compensation : filtres et fusion de capteurs pour une stabilité à long terme
Même avec une conception matérielle robuste, un étalonnage précis et une compensation en temps réel, une légère dérive résiduelle subsiste toujours. Sur de longues périodes de fonctionnement, ces erreurs résiduelles peuvent s'accumuler ; c'est pourquoi les systèmes hautes performances intègrent un filtrage et une fusion de capteurs pour garantir leur stabilité.
Techniques de filtrage
Les filtres passe-bas ou adaptatifs stabilisent l'estimation du biais et atténuent les variations de température dues au bruit. Les méthodes de détection statique permettent au système de mettre à jour les estimations de biais dès que l'IMU est immobile, améliorant ainsi la stabilité à long terme.
Fusion du capteur
Les algorithmes de fusion introduisent des références externes pour supprimer la dérive accumulée. Parmi les sources d'assistance typiques, on trouve les accéléromètres pour la correction du tangage et du roulis par gravité, les magnétomètres ou le GNSS pour la stabilisation du cap, et l'odométrie, la vision ou le LiDAR pour la navigation de longue durée. La fusion basée sur les filtres EKF/UKF ancre le système à des références absolues, empêchant ainsi la dérive due à la température de dégrader les performances.

Choisir la bonne centrale inertielle : MEMS ou FOG ?
Choisir la centrale inertielle (IMU) appropriée dès le départ est l'un des moyens les plus efficaces d'éviter les limitations dues à la dérive thermique. Les centrales inertielles MEMS sont idéales lorsque la compacité, la faible consommation et le faible coût sont des critères prioritaires, et lorsqu'une assistance externe est disponible. Elles conviennent aux missions de courte à moyenne durée et aux conditions environnementales modérées.
Les centrales inertielles FOG sont préférables lorsqu'une stabilité à long terme, une grande précision de cap ou d'importantes variations de température sont requises. Elles sont particulièrement adaptées aux missions ne pouvant s'appuyer sur le GNSS ou d'autres corrections externes.
Règle simple :
- Si votre système peut s'appuyer sur la fusion et nécessite un faible encombrement, taille et consommation (SWaP) → choisissez les MEMS.
- Si votre système ne supporte pas la dérive accumulée → choisissez FOG.

Création d'un système stable avec l'IMU GuideNav appropriée
La dérive thermique des centrales inertielles devient gérable grâce à une ingénierie appropriée : optimisation matérielle, étalonnage de la température, compensation en temps réel, filtrage et fusion de capteurs. Ces mesures permettent aux drones, aux véhicules à guidage automatique, aux robots et aux systèmes de défense de maintenir des performances stables, même dans des conditions thermiques extrêmes.
GuideNav propose des centrales inertielles (IMU) dotées d'une excellente stabilité thermique, de procédures d'étalonnage rigoureuses et d'algorithmes de compensation fiables. Choisir une IMU GuideNav adaptée à votre environnement opérationnel et à vos exigences de précision garantit à votre système une stabilité thermique optimale, minimisant ainsi la dérive de température et améliorant sa fiabilité à long terme.
