FOG vs MEMS en navigation sous-marine : lequel est le plus performant ? (Partie 1)
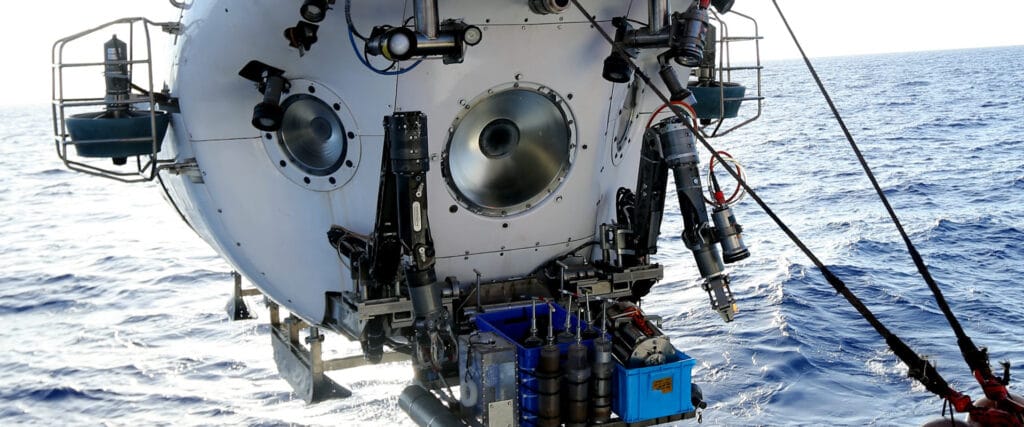
Les gyroscopes FOG maintiennent une dérive ultra-faible et une stabilité à long terme dans des conditions sous-marines sans GNSS, tandis que les IMU MEMS offrent des alternatives compactes et à faible consommation mieux adaptées aux inspections de courte durée et aux plates-formes sensibles aux coûts.
FOG vs RLG : évaluation de la précision, de la fiabilité et des coûts du cycle de vie
Le FOG et le RLG sont deux technologies gyroscopiques reconnues pour la navigation militaire. Cependant, lorsque les acheteurs les comparent dans le cadre de l'approvisionnement, le FOG offre un équilibre optimal entre performances, fiabilité et coût du cycle de vie pour presque toutes les missions hors dissuasion stratégique.
Comment choisir un FOG qui vous intègre, vous accompagne et vous accompagne
Choisir un gyroscope à fibre optique (FOG) inadapté peut retarder les projets et augmenter les coûts. Les acheteurs avisés ne se contentent pas de la fiche technique : ils choisissent un FOG qui s'intègre parfaitement, offre des performances constantes et bénéficie d'une garantie de service et de livraison à long terme.
Sensibilité thermique des gyroscopes à fibre optique : stratégies de conception pour les environnements extrêmes
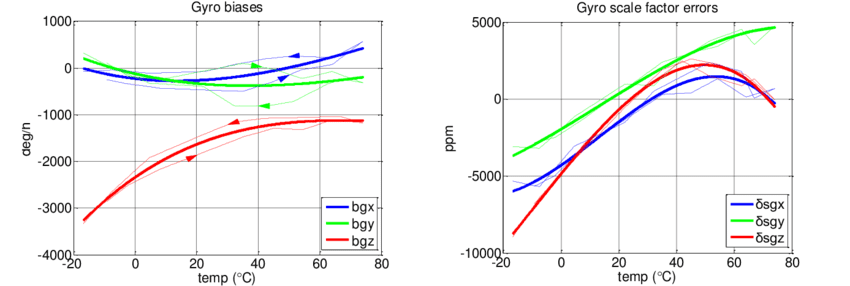
La sensibilité thermique des gyroscopes à fibre optique résulte de la dilatation du matériau, des variations de l'indice de réfraction et du comportement de la source optique. Des stratégies avancées – compensation thermique, optimisation de l'enroulement de la bobine et étalonnage robuste – permettent aux gyroscopes à fibre optique de maintenir leur précision dans des environnements extrêmes.
Concevoir en tenant compte de l'ARW : Ingénierie pratique pour la sélection de l'IMU (Partie 2)
La marche aléatoire angulaire (ARW) définit la limite ultime de la précision des centrales inertielle. Elle ne peut être supprimée par logiciel, mais seulement réduite par une sélection de capteurs à faible bruit, une conception thermique stable, une isolation contre les vibrations et des stratégies efficaces de fusion multicapteurs.
Comprendre l'ARW : la limite cachée de la précision de l'IMU (1re partie)
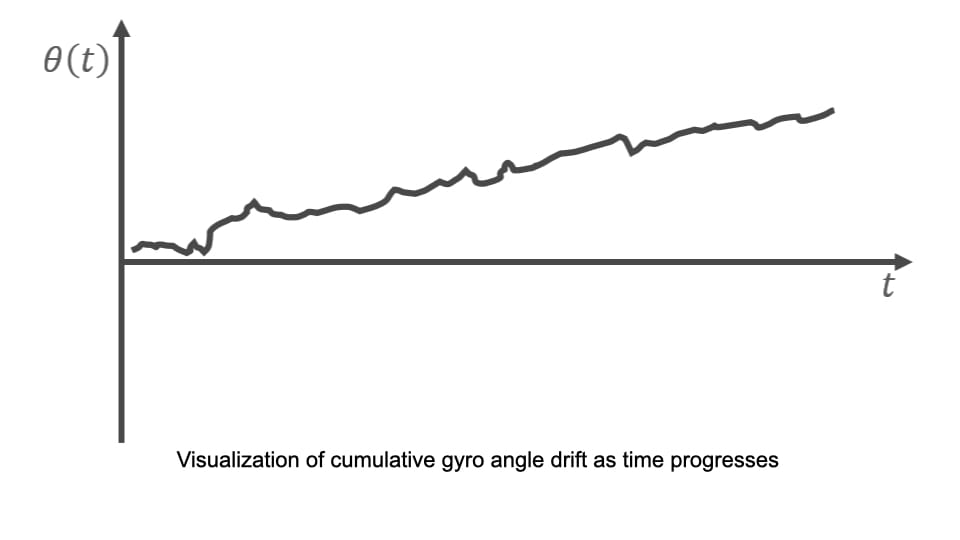
L'ARW n'est pas une spécification, c'est une horloge. Dès le démarrage de votre IMU, elle vous indique la vitesse à laquelle la confiance d'orientation se dégrade. Plus elle est basse, plus votre système reste stable longtemps.
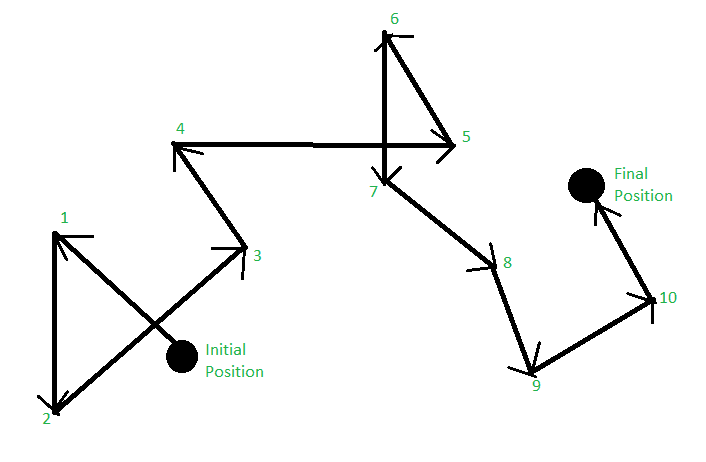
10 erreurs de conception commises par les ingénieurs lors de l'intégration des IMU
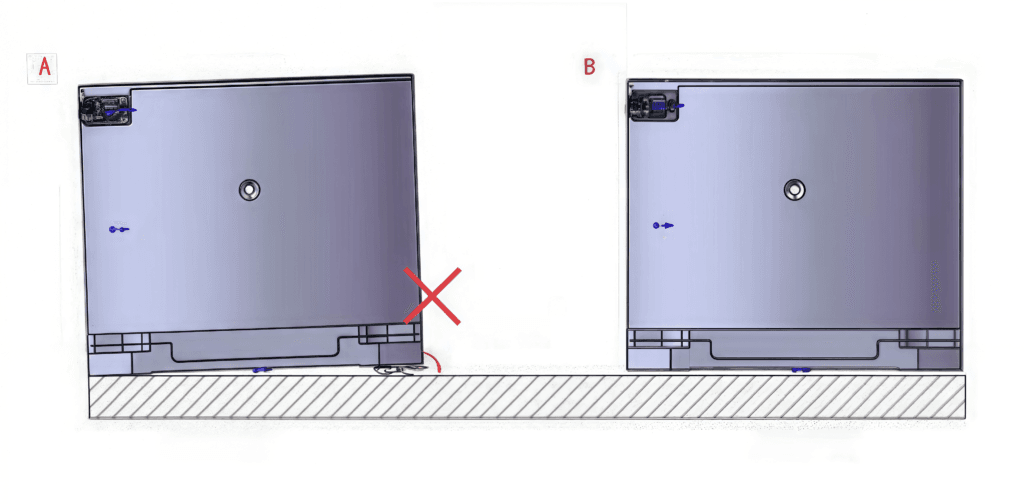
Les erreurs d'intégration d'IMU peuvent compromettre la fiabilité de la navigation. Du désalignement et des vibrations à un mauvais étalonnage et une dépendance excessive à la fusion des capteurs, les ingénieurs répètent souvent les mêmes erreurs. Dans ce guide, nous explorons les 10 erreurs les plus courantes en matière d'intégration d'IMU, expliquons leurs conséquences et proposons des solutions expertes que vous pouvez appliquer à vos propres projets.
Technologie FOG dans le contrôle d'attitude des engins spatiaux : au-delà des limites des MEMS
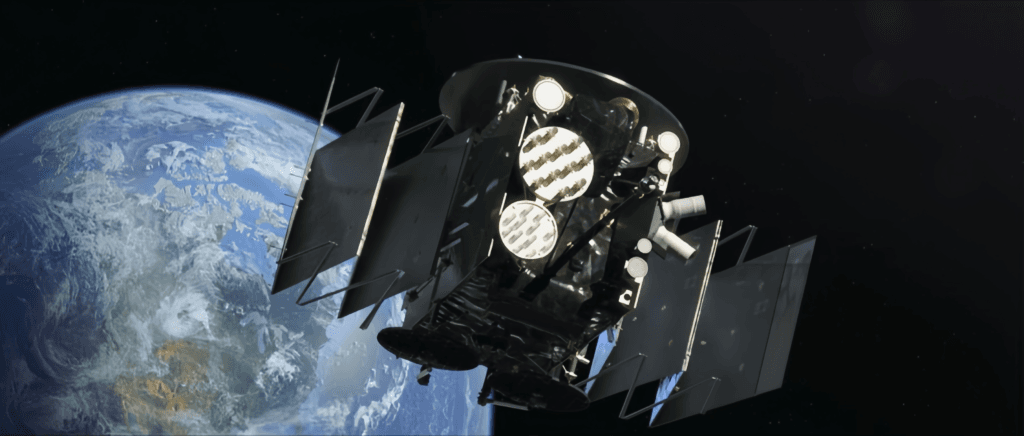
Les gyroscopes à fibre optique surpassent les MEMS en offrant une stabilité à long terme, une résistance aux radiations et une précision fiable pendant des années. Ils sont indispensables pour les satellites, les constellations et les sondes spatiales lointaines, où la précision ne peut être compromise.
Comment la fusion multicapteurs redéfinit les systèmes de navigation inertielle

La précision de la navigation inertielle est finalement limitée par la qualité de la modélisation et de la compensation des erreurs des capteurs. De la dérive de biais à la marche aléatoire, une atténuation efficace nécessite une combinaison de conception matérielle, de routines d'étalonnage et de correction algorithmique en temps réel.
Top 10 des fournisseurs d'unités de mesure inertielle (IMU) FOG en 2025

Découvrez les 10 meilleurs fournisseurs d'IMU à fibre optique en 2025, dont Honeywell, Exail, GuideNav et bien d'autres. Comparez la dérive de polarisation, le contrôle des exportations et les performances tactiques pour les applications aérospatiales et de défense.