Comment les gyroscopes et les accéléromètres influencent les performances des centrales inertielles

Une centrale inertielle stable repose sur la fusion des données du gyroscope et de l'accéléromètre. Les gyroscopes dérivent, les accéléromètres sont bruyants, et un filtre complémentaire combine les deux pour fournir une estimation d'attitude fiable et légère en temps réel.
Accéléromètre à quartz vs. accéléromètre MEMS

Les accéléromètres à quartz offrent une précision et une stabilité supérieures sur le long terme, tandis que les accéléromètres MEMS proposent des performances compactes, durables et économiques. Le choix le plus adapté dépend des exigences de précision de votre projet, de votre budget et des conditions environnementales.
Pourquoi les conditions de test définissent la véritable signification des spécifications de l'IMU
Les conditions de test des centrales inertielles déterminent la fiabilité et le réalisme de leurs spécifications. La température, les vibrations, la durée et le filtrage influent sur les données annoncées et sur les performances réelles du capteur.
Application des centrales inertielles MEMS aux robots d'inspection de pipelines
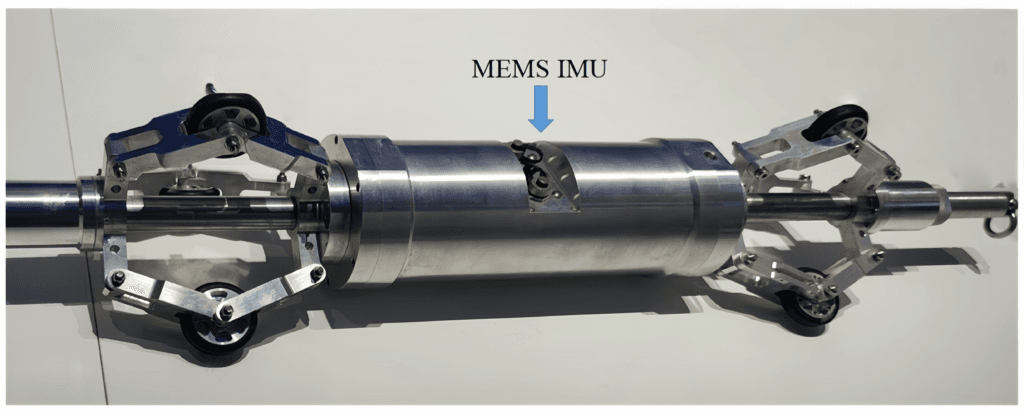
Les centrales inertielles MEMS assurent une navigation inertielle précise pour les robots d'inspection de pipelines opérant dans des environnements sans GNSS. En fournissant des données stables d'attitude, de vitesse et de position, elles garantissent une cartographie fiable des défauts, un contrôle précis de la trajectoire et un fonctionnement continu dans les pipelines souterrains ou sous-marins en espace confiné.
Les pièges cachés de l'utilisation des IMU MEMS de haute précision : ce que tout intégrateur devrait savoir

Les IMU MEMS de haute précision offrent des performances de détection de mouvement inégalées, mais uniquement si elles sont utilisées correctement. Cet article révèle quatre erreurs d'utilisation critiques qui entraînent souvent une perte de précision, et comment les éviter lors d'une intégration en conditions réelles.
Avantages et inconvénients de l'IMU MEMS Honeywell HG1930
Le Honeywell HG1930 est une centrale inertielle MEMS compacte et de qualité tactique offrant des performances fiables et une conception robuste pour les drones, la robotique et les systèmes de défense. Il offre une précision stable dans les environnements difficiles, mais présente un coût plus élevé et des limitations d'exportation.
Au cœur de la technologie de localisation basée sur l'INS derrière la conduite autonome
Les véhicules autonomes atteignent une précision au centimètre près grâce à l'intégration GNSS/INS, à la cartographie LiDAR et à la perception visuelle, les IMU de haute précision constituant le cœur de la localisation lorsque les signaux GPS échouent.
Une IMU peut-elle à elle seule effectuer l'odométrie ?

Une IMU peut théoriquement calculer l'odométrie par double intégration, mais les biais et le bruit la font dériver de manière exponentielle au fil du temps. Les systèmes de navigation réels s'appuient donc sur la fusion de l'IMU avec le GNSS, le LiDAR ou les caméras pour maintenir précision et stabilité.
Quand faut-il recalibrer ou remplacer un IMU FOG ?
Réétalonnez votre IMU FOG tous les 12 à 24 mois pour maintenir la stabilité du biais. Remplacez-la tous les 5 à 8 ans ou lorsque la dérive dépasse les spécifications pour garantir la fiabilité de la navigation à long terme.
Conception de GuideNav : comment les IMU à fibre optique robustes résistent aux chocs et aux vibrations

Les IMU à fibre optique robustes offrent une fiabilité extrême grâce à l'association de boîtiers en titane, de suspensions à bobine flottante, d'isolateurs en élastomère et à câble métallique, ainsi que d'une compensation du signal basée sur l'IA. Ces technologies leur permettent de fonctionner parfaitement sous des vibrations et des chocs intenses, là où les gyroscopes conventionnels échouent.