La navigation sous-marine est impitoyable. Sans signaux GPS, les véhicules sous-marins dépendent entièrement de capteurs inertiels pour suivre leur position. Une légère dérive par minute peut se transformer en kilomètres d'erreur au cours de longues missions. Pour les opérateurs cartographiant des pipelines ou explorant des eaux profondes, de tels écarts peuvent entraîner des missions inutiles, des coûts plus élevés et une sécurité compromise. C'est pourquoi le choix entre les gyroscopes à fibre optique (FOG) et les centrales inertielle MEMS est si crucial.
Les gyroscopes FOG maintiennent une dérive ultra-faible et une stabilité à long terme dans des conditions sous-marines sans GNSS, tandis que les IMU MEMS offrent des alternatives compactes et à faible consommation mieux adaptées aux inspections de courte durée et aux plates-formes sensibles aux coûts.
Le débat entre FOG et MEMS ne porte pas sur la technologie la plus récente, mais sur celle qui résiste véritablement aux dures réalités de la navigation sous-marine. En comparant leurs performances en termes de précision, de résilience environnementale, de tolérance aux vibrations, de SWaP et de facteurs de cycle de vie, nous pouvons identifier les points forts et les points faibles de chaque technologie. Cette perspective structurée aide les opérateurs à associer le capteur adapté à la mission sous-marine.
Table des matières
Précision et dérive sur les missions de longue durée : quel capteur est le plus performant ?
Performances du FOG
Les capteurs FOG exploitent l'effet Sagnac pour mesurer la vitesse angulaire, indépendamment des pièces mécaniques. Cette conception offre des taux de dérive exceptionnellement faibles , souvent inférieurs à 0,05 °/h, ce qui les rend très stables pour les missions de 6 à 10 heures, voire plus. Pour la cartographie sous-marine ou l'inspection de pipelines, les AUV équipés de FOG maintiennent des estimations de cap fiables sans mises à jour externes constantes, garantissant ainsi la précision des levés et l'efficacité des missions.
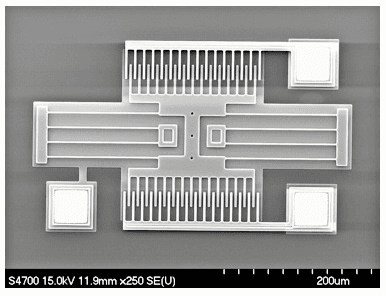
Performances des MEMS
Les gyroscopes MEMS mesurent la rotation à travers des structures vibrantes. Malgré des améliorations, leur instabilité de biais reste de l' ordre de 1 à 10 °/h , ce qui entraîne des erreurs cumulatives importantes dans les environnements dépourvus de GNSS. Les unités MEMS peuvent gérer de courtes plongées ou des tâches d'inspection de moins d'une heure, mais sur de longues durées, l'accumulation de dérive nécessite des corrections fréquentes via des DVL, des USBL ou des balises acoustiques. Cette dépendance limite l'autonomie lors des opérations en haute mer.
Comparaison
FOG : Stabilité inégalée, adaptée aux relevés de longue durée.
MEMS : Convient uniquement aux missions à courte portée et à durée limitée.
Verdict : FOG est le meilleur choix lorsque la précision dans le temps est essentielle à la mission.
Robustesse environnementale : quelle technologie résiste aux extrêmes de pression et de température sous-marines ?
Robustesse du FOG
Les FOG utilisent des bobines optiques et une électronique à semi-conducteurs, ce qui les rend intrinsèquement résistants à la pression, à la salinité et aux fortes variations thermiques . L'absence de structures vibrantes limite l'impact de la pression en profondeur sur les performances. La dérive en température est prévisible et peut être compensée en usine, garantissant une précision de cap constante, même dans les eaux arctiques ou tropicales.
Robustesse des MEMS
Les capteurs MEMS sont construits sur des microstructures en silicium, sensibles à la dilatation thermique, aux contraintes et aux fluctuations de pression . Les conditions sous-marines, notamment les variations rapides de température ou la forte salinité, peuvent dégrader leur stabilité de polarisation et la linéarité de leur facteur d'échelle. Les algorithmes de compensation et l'encapsulation sont utiles, mais les MEMS nécessitent généralement un réétalonnage actif lorsque les conditions environnementales varient.
Comparaison
FOG : Plus robuste en cas d'exposition à long terme aux environnements sous-marins.
MEMS : Sensible au stress environnemental, nécessite une correction fréquente.
Verdict : Le FOG reste l’option fiable pour les missions en haute mer, tandis que le MEMS convient aux environnements peu profonds ou contrôlés.

Vibrations et chocs : quel capteur maintient la stabilité sous des charges dynamiques ?
Stabilité du brouillard
Les gyroscopes FOG, dépourvus de pièces mécaniques mobiles, sont intrinsèquement moins sensibles aux erreurs induites par les vibrations. Sur les plateformes sous-marines telles que les AUV opérant à proximité des courants marins ou les ROV manipulant des outils, les FOG maintiennent des sorties stables même en cas de micro-vibrations constantes ou de chocs soudains. Leur conception optique garantit une influence minimale des charges dynamiques sur le biais et le facteur d'échelle, ce qui explique la confiance accordée aux FOG dans les systèmes de lutte contre les mines navales et la construction offshore.
Stabilité des MEMS
Malgré leur construction robuste à l'échelle microscopique, les capteurs MEMS sont intrinsèquement plus vulnérables aux vibrations, au bruit et aux chocs . Les structures vibrantes peuvent capter des fréquences indésirables, provoquant des erreurs de mesure de la vitesse angulaire ou une instabilité temporaire de la sortie. Si les techniques d'amortissement et de filtrage améliorent les performances, les gyroscopes MEMS nécessitent souvent un traitement du signal important pour rester utilisables dans des environnements à fortes vibrations, comme les drones sous-marins propulsés par des propulseurs.
Comparaison
- FOG : Fournit des lectures stables en cas de vibrations et de chocs soudains, minimisant ainsi la propagation des erreurs.
- MEMS : Léger mais sujet au bruit induit par les vibrations, nécessitant un filtrage important.
- Verdict : Pour les plateformes exposées aux turbulences, aux vibrations induites par les hélices ou aux opérations d'outils sous-marins, FOG fournit clairement la solution la plus stable et la plus résistante aux missions.
Taille, poids et puissance : quel capteur convient aux plates-formes soumises à des contraintes SWaP ?
Caractéristiques du FOG SWaP
Les capteurs FOG sont traditionnellement équipés de bobines optiques plus grandes et consomment davantage d'énergie . Malgré la miniaturisation récente, un FOG de qualité tactique peut peser plusieurs centaines de grammes et consommer plusieurs watts. Sur les petits AUV ou les ROV à batterie limitée, cela peut réduire l'endurance ou la capacité de charge utile. Cependant, pour les véhicules sous-marins de moyenne et grande taille, le compromis entre taille et puissance est souvent justifié par une précision et une stabilité inégalées.
Caractéristiques SWaP MEMS
Les IMU MEMS sont intrinsèquement compactes, légères et économes en énergie . De nombreuses unités MEMS tactiques pèsent moins de 50 grammes et consomment moins d'un watt. Elles sont donc idéales pour les petits drones d'inspection, les unités de navigation portables pour plongeurs ou les charges utiles où chaque gramme et chaque milliampère comptent. Leur faible encombrement permet une intégration dans des boîtiers compacts, favorisant ainsi la conception de véhicules agiles.
Comparaison
- FOG : Plus volumineux et gourmand en énergie, idéal pour les plateformes disposant de suffisamment d'espace et de budgets énergétiques.
- MEMS : optimisé pour les systèmes à contraintes SWaP, permettant des conceptions légères et à faible consommation d'énergie.
- Verdict : Lorsque la compacité et l'efficacité sont des priorités absolues, le MEMS est le choix naturel ; pour les missions privilégiant la précision à l'endurance, le FOG reste la référence.

Intégration avec les aides sous-marines : quel capteur fonctionne le mieux avec DVL et USBL ?
Intégration FOG
Les gyroscopes FOG offrent une référence de haute stabilité qui améliore considérablement les performances des systèmes acoustiques Doppler Velocity Logs (DVL), Ultra-Short Baseline (USBL) et Long Baseline (LBL). Grâce à la précision des sorties FOG, les capteurs auxiliaires peuvent être mis à jour moins fréquemment, réduisant ainsi les erreurs de navigation, même lorsque les signaux acoustiques sont intermittents ou partiellement bloqués. Cette synergie fait des solutions INS basées sur FOG la référence pour les AUV de haute précision et les missions sous-marines longue durée.
Intégration MEMS
Les IMU MEMS dépendent davantage d'aides externes en raison de leur dérive et de leur instabilité de polarisation plus importantes . Bien qu'ils s'intègrent facilement aux DVL et aux USBL grâce à leur conception légère et numérique, le besoin fréquent de corrections accroît la dépendance du système aux mises à jour acoustiques. Dans les environnements bruyants ou à signal dégradé, la navigation basée sur les MEMS peut présenter des sauts ou une qualité de positionnement dégradée, à moins d'être renforcée par des algorithmes avancés de fusion de capteurs.
Comparaison
- FOG : Fournit une base stable pour les systèmes d'aide sous-marins, réduisant ainsi la dépendance aux corrections fréquentes.
- MEMS : Facile à intégrer mais nécessite des mises à jour externes constantes pour compenser la dérive.
- Verdict : Pour les missions où les mises à jour acoustiques peuvent être peu fiables, le FOG est le pari le plus sûr ; le MEMS peut suffire lorsque l'aide externe est garantie et fréquente.
De la stabilité de la dérive à la résilience environnementale, en passant par la tolérance aux vibrations, le SWaP et l'intégration du système, la comparaison jusqu'à présent montre clairement que le FOG surpasse généralement le MEMS dans des conditions sous-marines exigeantes, tandis que le MEMS reste un choix pratique pour les missions plus légères et plus courtes.
Cependant, les performances ne suffisent pas à elles seules à définir la solution idéale. Le coût, les exigences de maintenance, la qualité des données et les applications éprouvées sont tout aussi déterminants dans le choix d'un capteur pour plateformes sous-marines. Dans la deuxième partie, nous poursuivrons cette exploration en examinant les aspects économiques du cycle de vie, la maintenance, la fiabilité de la cartographie et des cas d'utilisation concrets, avant de décider quelle technologie est la plus performante sous l'eau.
