Les capteurs inertiels sont, par nature, imparfaits. La dérive du biais, la marche aléatoire et la sensibilité thermique ne sont pas des anomalies ; ce sont des comportements normaux. L’important n’est pas d’éliminer ces erreurs, mais de les gérer.
Au fil des années, j'ai appris qu'une navigation inertielle fiable ne repose pas uniquement sur les spécifications des capteurs ; elle dépend aussi de la capacité à comprendre et à compenser leurs imperfections. Que l'on utilise des MEMS ou des gyroscopes à fibre optique (FOG), le succès dépend de ce qui se passe une fois que le capteur commence à transmettre des données.
de la navigation inertielle est fondamentalement limitée par la qualité de la modélisation et de la compensation des erreurs des capteurs. Qu'il s'agisse de la dérive de biais ou de la marche aléatoire , une atténuation efficace requiert une combinaison de conception matérielle, de routines d'étalonnage et de correction algorithmique en temps réel.
La navigation inertielle n'est pas uniquement limitée par le matériel. Les performances matérielles constituent le minimum, mais le maximum dépend de l'efficacité de la gestion des erreurs.
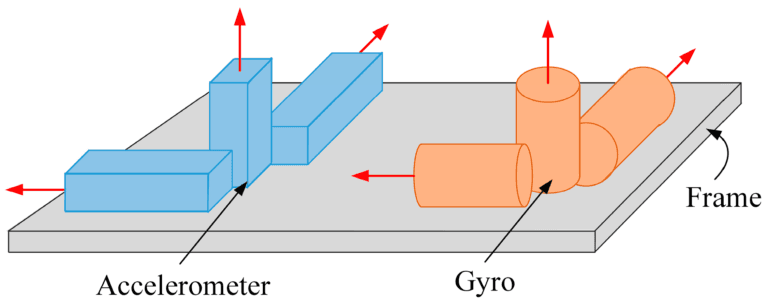
Table des matières
Pourquoi la compensation des erreurs constitue-t-elle le véritable goulot d'étranglement des systèmes d'assurance nationale ?
Les systèmes de navigation inertielle ne tombent généralement pas en panne brutalement ; leur dégradation est progressive . Ce qui commence par un léger biais dans le gyroscope ou un faible décalage dans l’accéléromètre se transforme lentement en une erreur croissante d’ attitude, de vitesse et de position . J’ai vu des systèmes de navigation inertielle passer d’une précision inférieure au mètre à une inutilisabilité en quelques minutes seulement , non pas à cause d’un dysfonctionnement des capteurs, mais parce que l’ erreur n’était pas correctement gérée .
Quelle que soit la précision théorique de votre centrale inertielle, un système de navigation inertielle non compensé dérivera toujours . Et dans les environnements sans couverture GNSS , cette dérive devient critique. Une compensation efficace n'est pas un atout : c'est le fondement d'un système de navigation inertielle fiable .
Catégorisation des erreurs INS : ce que vous pouvez modéliser et ce que vous ne pouvez pas
Lorsque je travaille avec des systèmes de navigation inertielle, l'une des premières choses que j'analyse est l'évolution des erreurs au fil du temps. Certaines sont prévisibles, d'autres non. Et cette différence est cruciale pour la compensation.
Erreurs systématiques : prévisibles et corrigibles
Ces erreurs sont reproductibles dans le temps et en fonction de la température si elles ne sont pas corrigées :
- Dérive de biais dans les gyroscopes et les accéléromètres
- non-linéarité du facteur d'échelle
- Légers défauts d'alignement entre les axes des capteurs
- Sensibilité thermique qui modifie la sortie en fonction de l'environnement
Avec une procédure d'étalonnage rigoureuse, ces erreurs peuvent généralement être mesurées une seule fois et compensées de manière cohérente, à condition que vos conditions restent dans les limites autorisées.
Erreurs aléatoires : imprévisibles, mais caractérisables
Il existe ensuite des erreurs qui ne peuvent être supprimées, mais seulement modélisées. Celles-ci comprennent :
- Marche aléatoire angulaire (ARW)
- Marche aléatoire à vitesse (VRW)
- bruit blanc du capteur
- Artefacts induits par les vibrations, notamment sur les plateformes mobiles
Conclusion : Les erreurs systématiques sont résolues en laboratoire. Les erreurs aléatoires sont combattues sur le terrain.
Comment les erreurs INS se propagent-elles au fil du temps ?
Avant d'aborder la question de la compensation, il est essentiel de comprendre le comportement des erreurs au sein d'un système de navigation inertielle (INS). Elles n'apparaissent pas soudainement ; elles se développent, s'accumulent et interagissent avec la dynamique du système de manières souvent sous-estimées. Analysons ce phénomène.
Les petites erreurs ne restent pas petites.
Dans un système de navigation inertielle, même un léger biais du gyroscope ou une erreur d'accélération de l'ordre du micro-g s'amplifient avec le temps. En effet, le système fonctionne par intégration des données des capteurs ; ainsi, toute erreur s'accumule à chaque étape.
L'intégration est un multiplicateur.
Une dérive d'orientation affecte la vitesse. Une erreur de vitesse impacte ensuite la position. Cette réaction en chaîne explique pourquoi un système aux caractéristiques apparemment excellentes sur le papier peut dériver de plusieurs centaines de mètres après 30 minutes d'interruption du signal GNSS.
Le profil de mouvement est très important.
Le mode de déplacement de votre système influence les erreurs prédominantes. Sur les plateformes statiques, le biais à long terme et la dérive thermique sont prépondérants. Dans les systèmes à haute dynamique, comme les drones, les missiles ou les rovers rapides, la non-linéarité liée au facteur d'échelle et le délai de propagation deviennent plus critiques que le biais lui-même.
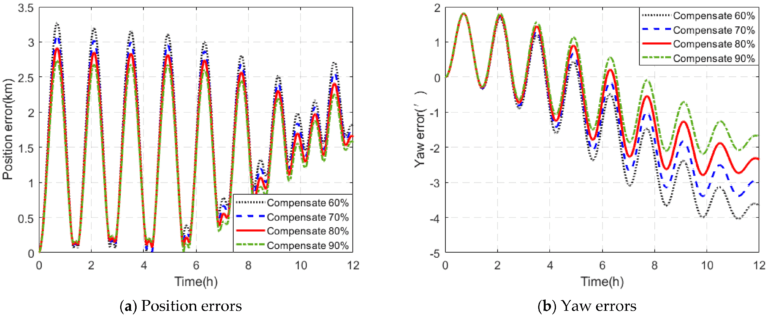
Les missions de longue durée amplifient tout.
Qu’il s’agisse d’un vol de reconnaissance de 12 heures ou d’un vol de missile de 2 minutes, plus votre système de navigation inertielle fonctionne sans correction, plus la modélisation de vos erreurs devient importante.
Modélisation des erreurs de capteurs pour une compensation efficace
Avant de pouvoir corriger quoi que ce soit dans un système de navigation inertielle (INS), il est essentiel de comprendre ce que l'on corrige. Le biais, la dérive et le bruit d'un capteur ne sont pas des anomalies, mais des comportements inhérents. Par conséquent, sans une modélisation précise, toute stratégie de compensation relève de la simple conjecture.
Je m'appuie généralement sur quatre méthodes de modélisation clés. Chacune cible différents types d'erreurs et, ensemble, elles vous donnent une image claire du comportement de votre système, non seulement en laboratoire, mais aussi sur le terrain.
| Méthode de modélisation | Objectif principal | Types d'erreurs traitées | Pourquoi c'est important |
|---|---|---|---|
| Allan Variance | Analyser l'évolution du bruit des capteurs au fil du temps | ARW, instabilité de biais, dérive aléatoire | Indispensable pour le réglage des filtres et l'évaluation des capteurs |
| Étalonnage à six positions | Estimer les biais fixes et le désalignement | Biais, facteur d'échelle, désalignement des axes | Permet une suppression précise des erreurs statiques |
| Étalonnage thermique | Variation de la sortie cartographique en fonction des températures | Dérive de polarisation et de gain induite par la température | Essentiel pour les plateformes mobiles et extérieures réelles |
| Analyse PSD | Comprendre le bruit des capteurs en fonction de la fréquence | Bruit blanc, errance à basse fréquence | Permet de concevoir des filtres sans supprimer le mouvement réel |
Conseil : Combinez au moins trois de ces méthodes avant de faire confiance à votre système de navigation inertielle (INS) pour toute mission de longue durée ou sans couverture GNSS.
Techniques d'atténuation des erreurs basées sur le matériel
Un bon logiciel ne peut compenser un mauvais matériel. Dans les systèmes de navigation inertielle, les choix de conception mécanique, thermique et électrique influent directement sur la stabilité à long terme . Ce sont les techniques fondamentales sur lesquelles je m'appuie pour construire des plateformes INS robustes.
- L'isolation des vibrations est essentielle.
Les vibrations mécaniques non filtrées génèrent des signaux de mouvement parasites. L'utilisation d'isolateurs accordés ou de supports de capteurs correctement amortis permet de réduire considérablement le bruit haute fréquence, notamment sur les véhicules chenillés ou les aéronefs à voilure tournante.
- La constance thermique garantit la validité de votre étalonnage.
La mesure du capteur varie en fonction de la température. Une isolation passive ou un chauffage actif peuvent contribuer à maintenir la température de fonctionnement dans la plage de calibration.
- Le bruit du réseau électrique devient du bruit de signal.
Les ondulations de tension et les interférences électromagnétiques (IEM) provoquent une corruption subtile et persistante des signaux analogiques et numériques. J'utilise systématiquement des alimentations propres, des régulateurs à faible bruit et une séparation stricte entre les circuits analogiques et numériques.
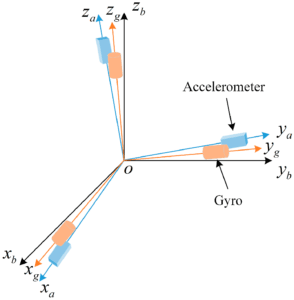
- La précision du montage influe sur l'alignement.
Même de minuscules décalages mécaniques peuvent entraîner des erreurs importantes d'attitude et de vitesse. Utilisez des supports rigides et usinés, et contrôlez soigneusement l'orientation et le couple de l'IMU.
- Utilisez des capteurs adaptés à la mission.
Ne vous contentez pas de choisir le « meilleur » capteur ; choisissez celui qui correspond à votre marge d’erreur. En cas de longues interruptions GNSS, la stabilité du biais est primordiale. Pour les plateformes rapides, la faible ARW et la bande passante sont prioritaires.
En résumé : les meilleures performances inertielles commencent bien avant la collecte des données ; cela commence par la manière dont vous fixez le capteur au châssis.
Techniques de rémunération basées sur les logiciels
Une fois le matériel stabilisé, le logiciel prend le relais. C'est là que s'effectue la majeure partie du contrôle de la dérive , et c'est aussi là qu'un bon modèle peut permettre à un capteur modeste d'offrir des performances exceptionnelles. Voici comment je procède en pratique :
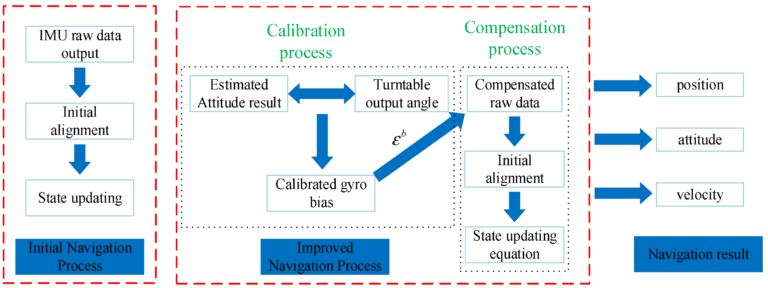
- Commencez par un étalonnage correct.
Utilisez des procédures statiques et dynamiques pour mesurer le biais, le facteur d'échelle, le défaut d'alignement et la réponse en température. Sans une bonne base d'étalonnage, tout le reste relève de la conjecture.
- Utilisez des filtres adaptés à votre dynamique.
Filtres de Kalman étendus (EKF), filtres de Kalman non parfumés (UKF) ou filtres complémentaires : choisissez en fonction de votre profil de mouvement et des sources d’aide disponibles. Une structure de filtre inadaptée est pire que l’absence de filtre.
- La compensation de température est non négociable.
Que vous utilisiez un gyroscope à fibre optique (FOG) ou une centrale inertielle MEMS, le comportement du capteur varie en fonction de la température. Une correction en temps réel, à l'aide de capteurs de température internes ou externes, peut réduire la dérive d'un ordre de grandeur.
- Le filtrage adaptatif améliore la capacité de survie.
Lors de missions à plusieurs phases (décollage, croisière, descente, etc.), les caractéristiques de bruit des capteurs évoluent. Le réglage adaptatif du filtre, basé sur la vitesse, les vibrations ou les données environnementales, permet à votre système de s'ajuster en conséquence.
- La correction en boucle fermée permet de maintenir les choses dans des limites définies.
Utilisez les mises à jour GNSS, odométriques, barométriques ou magnétométriques pour limiter la propagation des erreurs. Même une correction à faible fréquence toutes les quelques secondes améliore considérablement les performances lors des tâches de longue durée.
L'essentiel : un logiciel ne peut pas créer la précision, mais il peut la protéger , l'améliorer et la rétablir en cas de problème. Et c'est précisément ce qu'un bon système de navigation inertielle doit faire.
Le rôle de la fusion de capteurs dans la suppression de la dérive des systèmes de navigation inertielle
Même le meilleur système de navigation inertielle dérive : ce n’est pas un défaut, c’est une loi physique . La véritable question est de savoir comment limiter cette dérive à l’aide d’autres capteurs. C’est là que la fusion de capteurs devient l’outil le plus puissant du système.
GNSS + INS : La solution classique
Lorsque le GNSS est disponible, même de manière intermittente, il fournit des mises à jour de position absolue pour limiter la dérive du système de navigation inertielle.
Idéal pour : missions de longue durée, cartographie mobile, drones
Avantage : corrections précises, filtres éprouvés (EKF)
Avertissement : vulnérable au brouillage, aux pertes de signal et aux trajets multiples
Hybride FOG + MEMS : trouver le juste équilibre entre précision et coût
L'association d'un gyroscope à fibre optique stable et de MEMS réactifs offre le meilleur des deux mondes : une faible dérive et une réaction rapide.
Idéal pour : drones de taille moyenne, plateformes navales, systèmes robotiques
Avantage : meilleure ARW + SWaP plus faible
Avertissement : nécessite une intégration et un étalonnage croisé minutieux
Vision / LiDAR + INS : continuité sans GNSS
L'odométrie visuelle ou le LiDAR SLAM peuvent fournir des données de pose relative lorsque le GNSS n'est pas disponible, par exemple à l'intérieur ou sous terre.
Idéal pour : véhicules autonomes, tunnels, entrepôts, mines
Avantage : entièrement autonome
Avertissement : visibilité directe requise, sensible à l’éclairage ou à la densité des éléments.
Le timing est crucial. Fusion ne fonctionne que si vos capteurs sont synchronisés. Des horodatages décalés sont plus nuisibles qu'utiles.
Concrètement : la fusion ne consiste pas à ajouter plus de capteurs, mais à savoir lequel privilégier au bon moment.
L'approche de GuideNav en matière de fiabilité des systèmes de navigation inertielle
Après tout ce que j'ai vu sur le terrain — à travers les drones, les véhicules de levés topographiques, les systèmes marins — une chose reste vraie : les performances réelles d'un système de navigation inertielle dépendent de tout ce qui entoure le capteur .
Chez GuideNav, c'est précisément là que nous concentrons nos efforts.
- Chaque unité est entièrement calibrée en fonction de la température et des axes , et non pas seulement testée par lots.
- Nous fournissons des données réelles sur la variance Allan et une assistance au réglage des filtres, et non de simples fiches techniques.
- Nos modèles FOG et MEMS sont livrés avec des outils d'intégration prêts à l'emploi : synchronisation stable, interfaces propres et prise en charge de la fusion.
- Et comme nous ne sommes pas soumis à la réglementation ITAR , nos systèmes sont prêts pour un déploiement mondial dans les programmes de défense, industriels ou de recherche.
Vous n'obtenez pas seulement un capteur, vous obtenez une plateforme de navigation fiable lorsque d'autres systèmes tombent en panne.