Avez-vous déjà essayé d'intégrer un système de navigation, pour vous rendre compte ensuite qu'il ne donne aucune indication de position ?
Cela arrive lorsqu'on confond une centrale inertielle (IMU) avec un système de navigation inertielle (INS). Cela peut paraître technique, mais les conséquences sont bien réelles : mauvais choix de matériel, budget gaspillé et systèmes qui ne fonctionnent tout simplement pas comme prévu. La solution ? Comprendre les différences fondamentales entre une IMU, un INS et leur fonction respective. Ce guide vous expliquera tout cela en termes simples.
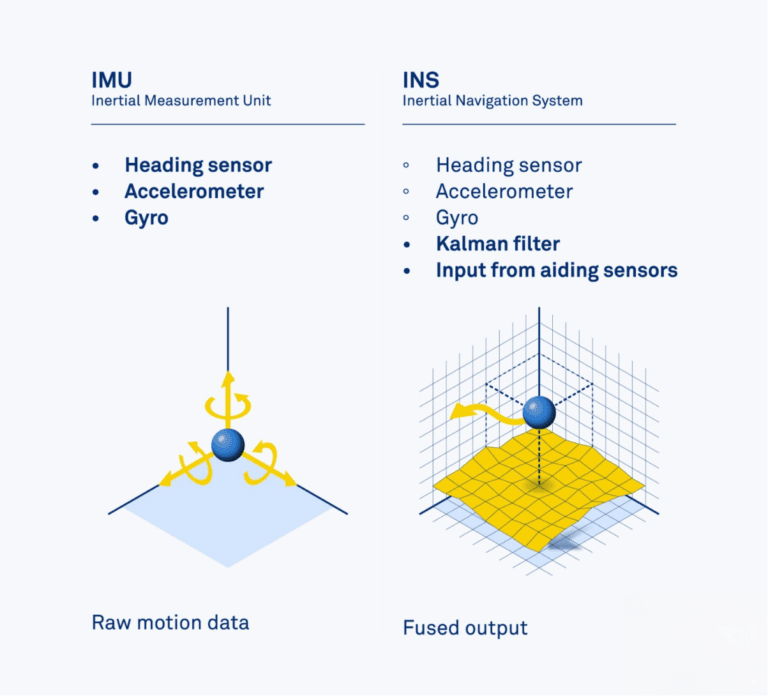
Une centrale inertielle (IMU) mesure le mouvement, tandis qu'un système de navigation inertielle (INS) utilise les données de l'IMU pour calculer la position et l'orientation au fil du temps ; l'IMU est un capteur, l'INS est un système.
Levons le voile sur cette confusion, étape par étape.
Table des matières

Qu'est-ce qu'une centrale inertielle (IMU) ?
Une centrale inertielle (IMU) est un capteur qui mesure l'accélération et la vitesse angulaire . Généralement construite à partir des technologies MEMS, FOG ou HRG, une IMU comprend des accéléromètres, des gyroscopes et parfois des magnétomètres . Elle fournit des données inertielles brutes utilisées pour estimer le mouvement dans l'espace. Les IMU sont largement utilisées dans les drones, la robotique, les véhicules et les smartphones. Cependant, à elles seules, elles ne fournissent ni position ni orientation , sauf si elles sont intégrées à un système de traitement supplémentaire. La précision des IMU varie, allant des modèles commerciaux économiques aux capteurs tactiques et de navigation de haute précision comme le GMS400 de GuideNav.

Qu'est-ce qu'un INS ?
Un système de navigation inertielle (INS) est un système complet qui utilise les données d'une centrale inertielle (IMU) pour calculer en temps réel la position, la vitesse et l'attitude
- Une centrale inertielle intégrée
- Un puissant processeur embarqué
- Algorithmes de fusion de capteurs (par exemple, filtre de Kalman )
- Souvent, un module GNSS est utilisé pour l'assistance
Le système de navigation inertielle (INS) intègre en temps réel les données de l'unité de centrale inertielle (IMU) pour fournir une solution de navigation continue. De ce fait, il peut fonctionner temporairement dans des environnements sans couverture GNSS, ce qui le rend indispensable pour les missions aérospatiales, maritimes et autonomes . Les systèmes GFS120 et GUIDE2D de GuideNav illustrent parfaitement cette intégration.
Quelles sont les différences entre les IMU et les INS ?
La plupart des gens simplifient en disant : « Un système de navigation inertielle (INS) est simplement une centrale inertielle (IMU) équipée d’un module GNSS. » Techniquement, c’est un début, mais c’est loin d’être toute l’histoire.
Oui, un système de navigation inertielle (INS) comprend une centrale inertielle (IMU) en son cœur. Mais il intègre également un processeur, un système GNSS (souvent compatible RTK ou SBAS) et parfois des capteurs d'aide externes tels que des codeurs de roue, des anémomètres, des altimètres barométriques ou des lochs Doppler (DVL) . Ces ajouts permettent à l'INS de fusionner les données en temps réel, fournissant non seulement le mouvement, mais aussi des estimations très précises de la position, de la vitesse et de l'orientation.
Considérez une centrale inertielle comme un thermomètre : elle vous donne les données brutes. Le système inertiel, quant à lui, est le bulletin météorologique : filtré, fusionné et prêt à être exploité.
| Fonctionnalité | IMU | INS |
|---|---|---|
| Fonction principale | Mesure l'accélération et la rotation | Calcule la position complète, la vitesse et l'orientation |
| Composants | Accéléromètre, gyroscope | IMU + GNSS + Processeur + Capteurs optionnels |
| Sortir | données de mouvement brutes | Données de navigation fusionnées (temps réel) |
| Assistance GNSS | Aucun | Intégré (RTK/SBAS en option) |
| Aide extérieure | Non applicable | Odomètre, DVL, anémomètre, altimètre, etc. |
Peut-on naviguer uniquement avec une centrale inertielle ?
Imaginez une centrale inertielle comme une sensation de mouvement les yeux fermés. Vous savez que vous avancez ou que vous tournez, mais vous n'avez aucune idée de votre position. C'est ce qui se passe lorsque vous essayez de vous orienter uniquement à l'aide d'une centrale inertielle.
Certes, on peut intégrer l'accélération au fil du temps pour estimer la position. Cependant, de petites erreurs s'accumulent rapidement et se transforment en erreurs considérables en quelques secondes. C'est ce qu'on appelle la dérive, et c'est ce qui rend les centrales inertielles autonomes peu fiables pour la navigation.
Ils sont parfaits pour une stabilisation à court terme — comme maintenir le niveau d'une nacelle — mais pas pour déterminer votre position ou votre destination. Pour cela, il vous faut un système de navigation inertielle (INS).
Comment un système de navigation inertielle traite-t-il les données de l'IMU ?
Contrairement à une centrale inertielle (IMU), qui se contente de détecter le mouvement, un système de navigation inertielle (INS) interprète ce mouvement et le transforme en informations de navigation complètes. Cela inclut la connaissance de votre position, de votre vitesse et de votre direction. Mais ce processus n'est pas automatique. Il nécessite une série d'étapes soigneusement conçues, combinant physique, mathématiques et corrections en temps réel, pour transformer les signaux bruts en une navigation fiable.
Passons en revue le processus :
1. Détection de mouvement (entrée IMU)
Tout commence avec l'IMU, qui mesure en continu l'accélération (via des accéléromètres) et la vitesse angulaire (via des gyroscopes). Ces valeurs reflètent la façon dont le système se déplace dans l'espace 3D.
➡ Cette étape confère au système INS sa perception brute du mouvement.
2. Calculer la vitesse et la position
Le système de navigation inertielle (INS) intègre l'accélération pour obtenir la vitesse, puis intègre cette vitesse pour estimer la position au fil du temps. Cela permet au système de déterminer la distance parcourue depuis son point de départ.
➡ Voici comment le système INS suit les mouvements, même sans GPS.
3. Estimation de l'orientation
En traitant les données du gyroscope et en se référant à des vecteurs comme la gravité et le champ magnétique terrestre, le système de navigation inertielle (INS) détermine le roulis, le tangage et le lacet, soit votre orientation 3D complète.
➡ Cette étape permet au système de comprendre comment il est pivoté ou incliné.
4. Appliquer la fusion de capteurs pour plus de précision
Les données de l'IMU dérivent avec le temps. Le système de navigation inertielle (INS) utilise des algorithmes intelligents, comme les filtres de Kalman, pour combiner les données de l'IMU avec celles d'autres capteurs :
- GNSS / RTK / SBAS
- compteurs kilométriques de roue
- Capteurs DVL ou de vitesse anémométrique
- altimètres barométriques
Ces corrections améliorent considérablement la précision et la stabilité à long terme.
➡ La fusion assure la fiabilité du système, même lorsque certains capteurs perdent le signal.
5. Fournir une sortie de navigation en temps réel
Le résultat final est un flux continu et en temps réel de données de position, de vitesse et d'attitude, actualisé plusieurs fois par seconde et prêt à être utilisé par les contrôleurs de vol, les pilotes automatiques ou les systèmes de cartographie.
➡ C’est ce qui fait de l’INS une solution de navigation complète.
Les systèmes de navigation inertielle (INS) de GuideNav reposent sur cette architecture, avec des moteurs de fusion optimisés pour les conditions sans GNSS, les environnements dynamiques et les plateformes soumises à de fortes vibrations. Résultat : une navigation fiable sur laquelle vous pouvez compter dans les situations les plus critiques.
Quand une centrale inertielle est-elle suffisante pour votre application ?
Une centrale inertielle (IMU) suffit amplement si votre système a simplement besoin de détecter le mouvement , sans calculer la position ni le cap au fil du temps. Elle est idéale lorsque vous réagissez à un mouvement, et non lorsque vous cherchez à suivre une position absolue.
Les cas d'utilisation courants comprennent :
stabilisation de la caméra
Détecte les vibrations ou l'inclinaison pour aider les moteurs à maintenir la caméra stable.
Suivi des gestes
En réalité augmentée/réalité virtuelle ou avec des objets connectés, on suit le mouvement, et non une position exacte.
Orientation à court terme
Utilisé sur les drones ou les robots lors du démarrage, du vol stationnaire ou des manœuvres rapides.
Assistance aux commandes de vol
Associées à un système GNSS ou à un flux optique, les centrales inertielles (IMU) fournissent un retour d'information rapide pour la stabilisation des drones.
Il est important de noter que les centrales inertielles (IMU) ne fournissent que l'accélération et la rotation brutes. Si vous avez besoin de l'orientation ou de la vitesse, vous devrez effectuer vous-même les calculs : filtres, correction de la dérive, etc.
Si cela est possible avec votre système, une centrale inertielle (IMU) est une légère, abordable et efficace .
Quand avez-vous vraiment besoin d'une assurance INS complète ?
Un système de navigation inertielle complet est nécessaire lorsque votre système doit connaître en permanence sa position et son orientation exactes , notamment dans les environnements où le GNSS peut tomber en panne ou n'est pas disponible.
Les cas d'utilisation typiques comprennent :
- Environnements sans GNSS : tunnels, intérieurs, milieux sous-marins ou canyons urbains
- Plateformes à haute dynamique : telles que les drones, les missiles et les véhicules tout-terrain qui nécessitent des mises à jour rapides et précises
- Navigation à l'estime : situation où le système doit maintenir la navigation entre les signaux GNSS, voire sans aucun signal GNSS.
- Tâches exigeant une grande précision : telles que la cartographie, le ciblage ou la conduite autonome
Dans ces situations, une centrale inertielle seule dériverait rapidement, ce qui donnerait des résultats peu fiables. Un système de navigation inertielle (INS) résout ce problème en fusionnant les données inertielles avec les données GNSS et celles de capteurs optionnels comme un DVL, des odomètres ou des altimètres.
Quelles sont les erreurs courantes lors du choix entre IMU et INS ?
Soyons honnêtes : en matière de capteurs inertiels, il est facile de se tromper, surtout lorsqu’on débute. J’ai vu des équipes choisir le mauvais outil un nombre incalculable de fois. Et c’est rarement une question de technologie, mais plutôt d’une mauvaise compréhension du problème.

Voici où les choses dérapent généralement :
Erreur n° 1 : Penser qu'une centrale inertielle vous donne la position
Non. Une centrale inertielle (IMU) indique seulement votre vitesse de déplacement ou de rotation. Si vous espérez obtenir des coordonnées en temps réel dès la première utilisation, vous serez déçu.
Erreur n° 2 : Utiliser une centrale inertielle d’entrée de gamme pour un travail exigeant
Un capteur bon marché peut sembler intéressant sur le papier, mais une fois fixé à un drone ou un robot se déplaçant à grande vitesse, le bruit et la dérive ruineront vos données.
Erreur n° 3 : Payer pour un INS alors qu’une IMU aurait suffi
Si vous avez simplement besoin de stabiliser une caméra ou de détecter son orientation de base, un système de navigation inertielle complet est superflu. Inutile de dépenser 3 000 $ pour une solution à 300 $.
Erreur n° 4 : Oublier l'environnement réel
Les spécifications en laboratoire ne reflètent pas toujours les performances sur le terrain. De fortes vibrations, des températures extrêmes ou des chocs peuvent rapidement endommager les capteurs bon marché.
Erreur n° 5 : Sous-estimer l’effort d’intégration
Les données brutes de l'IMU ne sont pas prêtes à l'emploi. Sans les logiciels, filtres ou algorithmes adéquats, même le meilleur capteur ne donnera pas les résultats escomptés.
Quel type d'assistance GuideNav propose-t-il pour la sélection de l'IMU/INS ?
Chez GuideNav, nous ne nous contentons pas de livrer des capteurs ; nous vous aidons à concevoir le système idéal . Nous proposons :
- Conseil individuel en matière d'applications
- Appariement des performances IMU/INS
- Guides d'intégration pour les drones, les véhicules terrestres sans pilote et les systèmes maritimes
- Accès aux fiches techniques et kits d'évaluation
- Assistance technique à réponse rapide
Que vous construisiez un drone basse consommation ou un système de navigation sans GNSS, nous vous aidons à choisir entre une centrale inertielle MEMS, une centrale inertielle FOG ou un système de navigation inertielle complet en fonction de votre profil de mission.