Dans le cadre de mon travail de développement de systèmes de navigation, j'ai constaté que la véritable fiabilité repose sur l'indépendance, et non sur la dépendance à des signaux externes. C'est pourquoi les systèmes de navigation inertielle (INS) jouent un rôle si crucial : ils fonctionnent exclusivement grâce à des mesures internes, assurant une navigation fiable et continue dans une grande variété d'environnements, des véhicules autonomes aux plateformes aérospatiales.
Un système de navigation inertielle (INS) détermine la position, la vitesse et l'orientation en utilisant uniquement des capteurs de mouvement internes, permettant une navigation précise dans un large éventail d'applications, y compris les systèmes autonomes, les plateformes sous-marines et les opérations de défense critiques.
Avant de choisir un système de navigation inertielle (INS) pour votre application, il est utile de bien comprendre ses principes de fonctionnement et les types de systèmes disponibles.
Table des matières

Qu'est-ce qu'un système de navigation inertielle (INS) ?
Un système de navigation inertielle (INS) est un système autonome qui utilise des capteurs de mouvement internes (généralement des accéléromètres et des gyroscopes) pour calculer en continu la position, la vitesse et l'orientation d'une plateforme dans l'espace tridimensionnel. Ne dépendant d'aucune référence externe, l'INS est particulièrement précieux dans les environnements exigeant une navigation continue et sans interruption, notamment sous-marine, souterraine et pour les applications de défense à haute dynamique.
Quels sont les éléments essentiels d'un INS ?
D'après mon expérience en conception de systèmes de navigation inertielle (INS), tout système repose sur trois composants essentiels : des gyroscopes, des accéléromètres et un processeur de navigation. Pour améliorer la précision et la stabilité, nous intégrons souvent des capteurs supplémentaires, tels que des récepteurs GNSS, des magnétomètres ou des altimètres barométriques, pour une fusion de données avancée. Cette architecture permet à l'INS de maintenir un suivi de mouvement fiable dans des environnements variés et complexes.

Gyroscopes
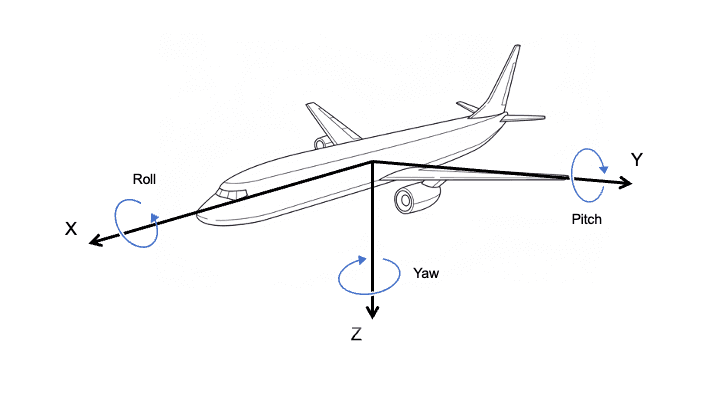
Les gyroscopes mesurent la vitesse angulaire selon trois axes orthogonaux (X, Y, Z), fournissant des données essentielles au calcul de l'orientation : roulis, tangage et lacet. Les gyroscopes MEMS sont largement utilisés pour les applications compactes, tandis que les gyroscopes à fibre optique (FOG) et les gyroscopes laser annulaires (RLG) offrent une précision et une stabilité à long terme supérieures pour les systèmes tactiques et aérospatiaux.
Accéléromètres
Les accéléromètres mesurent l'accélération linéaire selon chaque axe. L'intégration de ces valeurs dans le temps permet de calculer les variations de vitesse et de déplacement. Des accéléromètres haute performance, à faible instabilité de biais et à faible bruit, sont essentiels pour garantir la précision de la position dans le temps.
Processeur de navigation inertielle
Le processeur constitue le cœur de calcul du système de navigation inertielle (INS). Il fusionne les données des capteurs de mouvement, applique des algorithmes de compensation et de filtrage, et fournit en temps réel la position, la vitesse et l'orientation. De nombreux systèmes prennent également en charge l'intégration de capteurs externes et les diagnostics en temps réel au sein de cette unité.
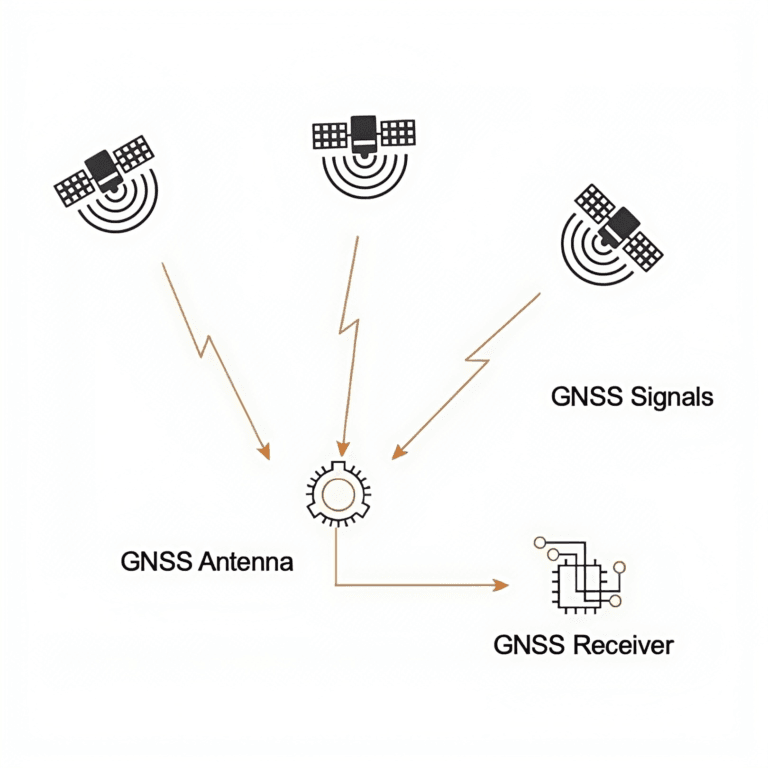
Récepteurs GNSS
De plus en plus de systèmes de navigation inertielle (INS) intègrent désormais des récepteurs GNSS afin d'améliorer la précision à long terme et le positionnement global. En combinant les mesures inertielles aux données satellitaires (généralement par filtrage de Kalman étendu), ces systèmes hybrides corrigent efficacement la dérive et offrent des performances de navigation robustes pour les plateformes autonomes, les systèmes aérospatiaux et les applications géodésiques.
Magnétomètres
Les magnétomètres permettent de déterminer le cap en mesurant le champ magnétique terrestre. Bien que moins précis que les solutions gyroscopiques, ils constituent une référence absolue utile, notamment pour les applications à faible dynamique ou en intérieur.
Altimètres barométriques
Ces capteurs permettent d'estimer l'altitude à partir de la pression atmosphérique. Ils sont couramment utilisés dans les drones, les aéronefs et les systèmes au sol qui nécessitent des données de référence verticale dans des environnements où l'altitude GNSS peut être peu fiable.
Ensemble, ces composants forment un système de navigation polyvalent capable de fournir des données de mouvement en temps réel à haute fréquence, qu'il fonctionne comme une simple centrale inertielle ou comme partie intégrante d'une solution GNSS/INS étroitement intégrée, conçue pour des environnements complexes et dynamiques.
Quels sont les différents types de systèmes d'insertie : MEMS, FOG et RLG ?
Les systèmes de navigation inertielle peuvent être classés selon le type de gyroscope utilisé. Le choix de cette technologie détermine des caractéristiques de performance clés telles que la stabilité du biais, le bruit, la dérive et le coût ; il est donc essentiel de sélectionner le système adapté à votre application.
1. MEMS INS (Systèmes micro-électro-mécaniques)
Les systèmes de navigation inertielle MEMS sont construits à partir de gyroscopes et d'accéléromètres micromécaniques à base de silicium. Grâce aux progrès réalisés dans la fabrication des semi-conducteurs, ces systèmes sont désormais largement utilisés dans des plateformes compactes où la taille, le poids, la consommation d'énergie et le coût (SWaP-C) constituent des contraintes majeures.



2. FOG INS (INS basé sur un gyroscope à fibre optique)
Le système de navigation à champ flou (FOG INS) exploite l'effet Sagnac, utilisant des fibres optiques enroulées pour mesurer la rotation. Il offre une stabilité nettement supérieure, une dérive moindre et une meilleure linéarité du facteur d'échelle que les systèmes MEMS, ce qui le rend idéal pour la navigation tactique.


3. RLG INS (INS basé sur un gyroscope laser annulaire)
Le système de navigation inertielle RLG utilise l'interférence laser dans une cavité en boucle fermée pour détecter la vitesse angulaire avec une précision extrême. Cette architecture offre une précision de niveau stratégique et est généralement déployée dans des systèmes où les performances inertielles absolues sont essentielles.
| Type INS | Avantages | Limites | Cas d'utilisation typiques |
|---|---|---|---|
| MEMS INS |
|
| Drones, robotique, systèmes portables, munitions rôdeuses |
| FOG INS |
|
| plateformes aérospatiales, véhicules de défense, systèmes maritimes |
| RLG INS |
|
| Missiles balistiques, engins spatiaux, avions de pointe |
Comment fonctionne l'INS ?
Lors de la configuration d'un système de navigation inertielle (INS), je commence toujours par définir sa position, sa vitesse et son orientation initiales. Ensuite, le système s'appuie exclusivement sur des mesures inertielles pour estimer en temps réel chaque état de mouvement ultérieur.
1. Mesure de l'accélération
Le système utilise des accéléromètres triaxiaux pour mesurer l'accélération linéaire dans trois directions. Ces valeurs sont intégrées dans le temps pour calculer la vitesse, puis intégrées à nouveau pour calculer les variations de position.
2. Mesure de la vitesse angulaire
Les gyroscopes mesurent la vitesse angulaire selon les axes X, Y et Z. Ces mesures servent à mettre à jour l'orientation du système par intégration d'angles quaternioniques ou d'angles d'Euler.
3. Principe de l'estimation à l'estime
Le système de navigation inertielle (INS) fonctionne par estimation à l'estime, c'est-à-dire qu'il évalue l'état actuel à partir de l'état précédent et des données des capteurs. Cela lui permet de naviguer sans références externes comme le GNSS.
4. Accumulation d'erreurs et dérive
Du fait de l'intégration de données de capteurs bruitées, de petits biais et erreurs (par exemple, instabilité du biais, erreur de facteur d'échelle) s'accumulent au fil du temps, entraînant une dérive de la position et de l'orientation.
5. Fusion des capteurs et entrées auxiliaires
Pour minimiser la dérive, le système de navigation inertielle (INS) est souvent associé à des capteurs externes tels que des systèmes GNSS, des lochs Doppler (DVL), des baromètres ou des magnétomètres. Ces sources d'assistance corrigent les erreurs accumulées et améliorent la précision opérationnelle.
Cette architecture permet au système de navigation inertielle (INS) d'assurer une navigation autonome en temps réel dans des environnements où les signaux externes sont limités, perturbés ou totalement indisponibles, comme par exemple lors de fortes variations de dynamique ou d'interférences électromagnétiques.
Quels indicateurs de performance définissent la qualité d'un système de navigation aérienne ?
Lors du choix d'un système de navigation inertielle, il est essentiel de comprendre ses principaux paramètres de performance afin de garantir qu'il réponde aux exigences de la mission. Les indicateurs suivants sont les plus critiques :
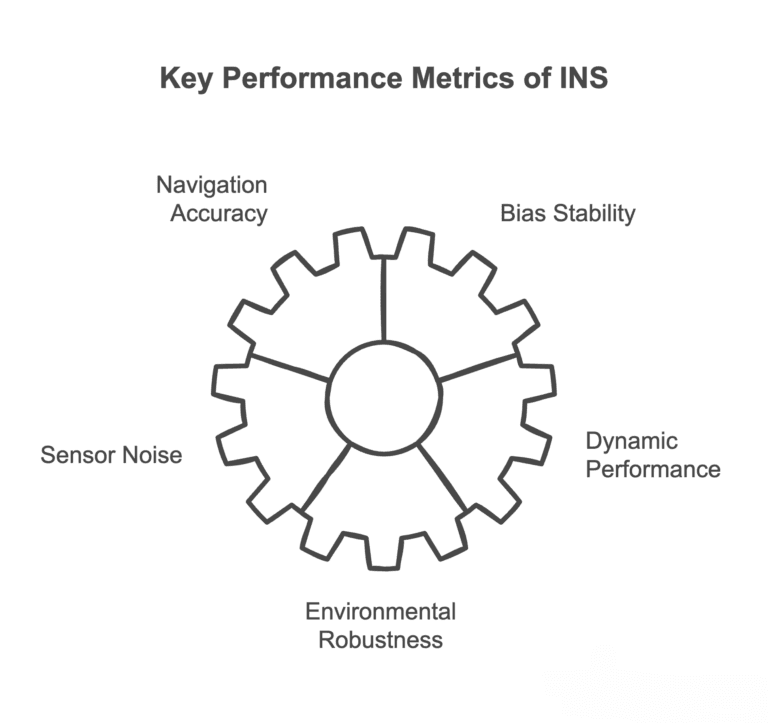
1. Précision de la navigation
La précision d'un système de navigation inertielle (INS) inclut les erreurs de position, de vitesse et d'attitude qui s'accumulent au fil du temps. Une haute précision est cruciale pour les opérations dans des environnements sans GNSS. Le Guidenav GFS120A, par exemple, offre une précision de cap de 0,01° (1σ) , une précision de roulis/tangage de 0,005° (1σ) et un positionnement de niveau RTK inférieur à 2 cm + 1 ppm , avec une erreur de vitesse minimale de 0,02 m/s .
2. Stabilité du biais
La stabilité du biais reflète la dérive à long terme des gyroscopes et des accéléromètres, ce qui influe directement sur l'autonomie de navigation. Le Guidenav GFS120A présente une stabilité du biais du gyroscope de 0,003°/h et une stabilité du biais de l'accéléromètre inférieure à 20 µg , ce qui le rend idéal pour les applications autonomes de haute précision et de longue durée.
3. Bruit du capteur (marche aléatoire)
La marche aléatoire quantifie le bruit du capteur à court terme. Des valeurs ARW et VRW plus faibles indiquent des données plus nettes et plus stables pendant le mouvement.
4. Performance dynamique
La fréquence de mise à jour, la latence et la bande passante déterminent la rapidité de réponse du système de navigation inertielle aux mouvements. Des performances dynamiques élevées sont essentielles pour les drones, la robotique et les missiles.
5. Robustesse environnementale
Le système de navigation inertielle (INS) doit résister aux vibrations, aux chocs et aux températures extrêmes. La conformité aux normes MIL-STD ou DO-160 garantit sa fiabilité dans des conditions difficiles.
La compréhension et la comparaison de ces indicateurs permettent aux intégrateurs de choisir le système de navigation inertielle (INS) approprié à leur plateforme, en équilibrant coût, précision et exigences environnementales.
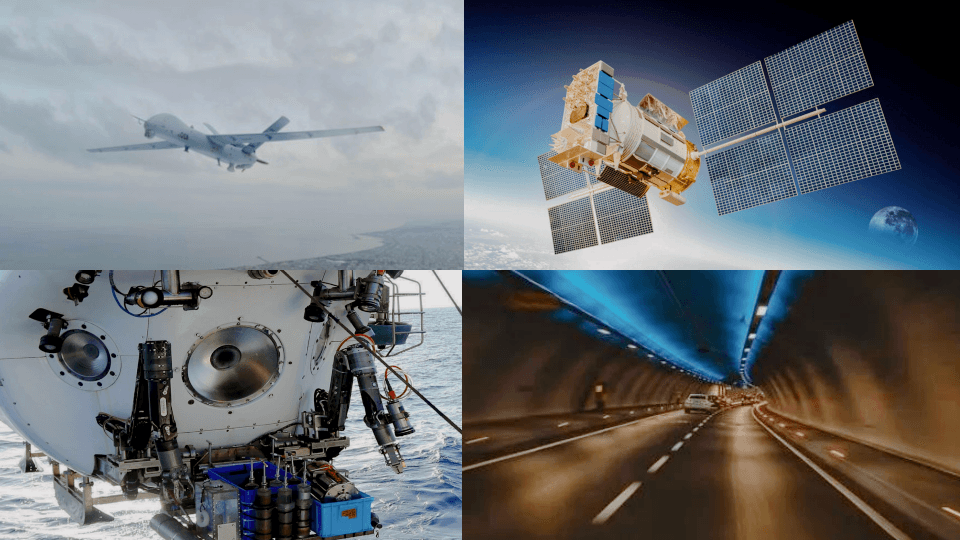
Quelles sont les applications typiques des systèmes de navigation inertielle (INS) dans différents secteurs d'activité ?
Les systèmes de navigation inertielle (INS) sont largement utilisés dans les secteurs de l'aérospatiale, du maritime, de la défense, des systèmes sans pilote, de l'automatisation industrielle et des industries souterraines, où une navigation continue et indépendante du signal est essentielle. Dans l'aérospatiale, ils permettent un guidage précis des aéronefs et des missiles ; dans les applications maritimes, ils sont indispensables aux sous-marins et aux AUV (véhicules sous-marins autonomes) en l'absence de GNSS (système de navigation à réaction). Les systèmes de défense s'appuient sur les INS pour le ciblage, le contrôle de tir et la navigation dans les environnements sans GPS. Les plateformes sans pilote telles que les drones (UAV), les véhicules terrestres sans pilote (UGV) et les véhicules sous-marins autonomes (UUV) utilisent les INS pour le positionnement en temps réel et la fusion de données de capteurs. En robotique industrielle, les INS garantissent un contrôle précis des mouvements des AGV (véhicules à guidage automatique) et des grues. Dans les secteurs minier et du creusement de tunnels, les INS permettent un positionnement souterrain fiable des engins lourds et des systèmes de forage.
Comment GuideNav se positionne-t-il comme leader dans le secteur de la navigation inertielle ?
Avec plus de 15 ans d'expertise, GuideNav fournit des solutions de navigation inertielle haute performance auxquelles font confiance les intégrateurs de systèmes de défense, aérospatiaux et autonomes du monde entier.
Gammes de produits diversifiées
Des systèmes de navigation inertielle MEMS compacts pour drones aux systèmes FOG INS de haute précision pour les secteurs maritime et aérospatial, GuideNav couvre une gamme complète de profils de mission.
Optimisé pour SWaP-C
Tous les systèmes sont conçus pour optimiser la taille, le poids, la consommation d'énergie et les coûts – idéaux pour les plateformes mobiles, embarquées et tactiques.
Prêt pour l'intégration hybride
Nos plateformes INS prennent en charge la fusion transparente avec les systèmes GNSS, DVL et autres capteurs d'assistance via des interfaces standard (UART, CAN, Ethernet).
Robuste et éprouvé sur le terrain
Conçues pour répondre à la norme MIL-STD-810H, les unités GuideNav sont résistantes aux chocs, tolérantes aux vibrations et fonctionnent de manière fiable dans des environnements difficiles.
GuideNav est le partenaire privilégié des intégrateurs à la recherche de systèmes de navigation inertielle (INS) avancés qui combinent haute précision, robustesse opérationnelle et conformité totale aux normes d'exportation pour les applications exigeantes dans les domaines de la défense, de l'aérospatiale et des systèmes autonomes.